Какак разница между короткозамкнутым и фазным ротором
Какак разница между короткозамкнутым и фазным ротором
Ротор — вращающаяся часть двигателей и рабочих машин, на которой расположены органы, получающие энергию от рабочего тела или отдающие её рабочему телу.
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля.
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т. д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Ранее ЭлектроВести писали, что в Атлантическом океане первый в мире телескопический ветрогенератор обеспечивает электроэнергией 5000 домохозяйств на одном из Канарских островов — Гран-Канария.
По материалам: electrik.info.
Численное моделирование и анализ критических частот вращения ротора авиационного двигателя (2013 г.) — FEA.RU | CompMechLab
Неуравновешенность ротора, неточность изготовления деталей и сборки ротора, неравножесткость сечений вала относительно перпендикулярных осей, неконсервативные силы, действующие на ротор и пр. могут являться причинами появления колебаний ротора. При этом в зависимости от частоты вращения ротора амплитуда колебаний может сильно меняться и в некоторых случаях значительно увеличиваться («выходить на резонанс»). Данные частоты называют критическими и требуют детального изучения при проектировании изделия.
могут являться причинами появления колебаний ротора. При этом в зависимости от частоты вращения ротора амплитуда колебаний может сильно меняться и в некоторых случаях значительно увеличиваться («выходить на резонанс»). Данные частоты называют критическими и требуют детального изучения при проектировании изделия.
В 2013 году сотрудниками Лаборатории «Вычислительная механика» (CompMechLab®) НИУ СПбГПУ по заказу ОАО «Климов» входящего в ОАО «Объединенная двигателестроительная корпорация Госкорпорации «Ростех» была выполнена работа по теме «Разработка математических и конечно-элементных моделей, методики расчета критических частот вращения ротора авиационного двигателя на традиционных опорах и оптимизация конструкции ротора».
Перед сотрудниками CompMechLab® стояла задача разработать 3-D математические и конечно-элементные модели ротора авиационного двигателя и предложить уточненную методику расчета критических частот и затем, на основе предложенной расчетной методики, выполнить рациональную оптимизацию конструкции ротора.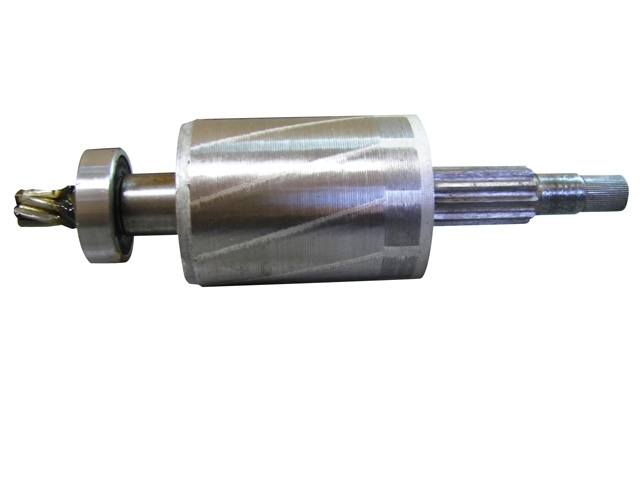
В рамках работы была построена пространственная (3-D) параметрическая геометрическая модель ротора авиационного двигателя, математическая и 3-D конечно-элементная модель ротора на основании созданной параметрической геометрической модели.
Были выполнены конечно-элементные расчеты 3-D теплового и термонапряженного состояния ротора в зависимости от заданных тепловых режимов работы двигателя и действующих температурных нагрузок. Выполнены конечно-элементных расчеты критических частот вращения ротора.
Публикация подготовлена сотрудниками CompMechLab®
Фазный ротор электродвигателя
Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).

Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Как известно, электродвигатели с фазным ротором имеют обмотки как на статоре, так и на роторе, что повышает вероятность выхода из строя именно одной из них.

Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке. Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
- Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
 Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шумаДля самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Safran отмечает начало испытаний прототипа двигателя с открытым ротором (Open Rotor) на новом открытом испытательном стенде в Истре
Eric Drouin
Двигатель с открытым ротором, отличающийся новой конструкцией без обтекателя с двумя воздушными винтами противоположного направления вращения, должен позволить сократить потребление топлива и уровень выбросов CO2 на 30 % по сравнению с современными двигателями CFM56**. Программа по созданию прототипа, запущенная в 2008 году по инициативе Safran, уже прошла ряд важных этапов, в том числе испытания в аэродинамической трубе в ONERA, которые привели в 2015 году к сборке опытного образца и началу наземных испытаний на открытом стенде в Истре в мае текущего года.
Программа по созданию прототипа, запущенная в 2008 году по инициативе Safran, уже прошла ряд важных этапов, в том числе испытания в аэродинамической трубе в ONERA, которые привели в 2015 году к сборке опытного образца и началу наземных испытаний на открытом стенде в Истре в мае текущего года.
«Двигатель Open Rotor является для Safran основным направлением научного поиска. С помощью двигателя LEAP** мы показали наши возможности в плане разработки и внедрения новых технологий. Наша цель – продвинуть инновационную стратегию еще дальше и предложить рынку наилучшее решение, — заявил президент-генеральный директор Safran Филипп Петиколен. — В нашу задачу входит изучение множества различных или взаимодополняющих версий, чтобы совместно с партнерами по программе Clean Sky разработать технологии для создания силовых установок, которые принесут значительные преимущества самолетам будущего».
«После 10 лет усиленной работы мы можем гордиться опытным образцом двигателя Open Rotor, успешно прошедшего первый запуск,- подчеркнула Клара Де Ля Торре, представитель Европейской Комиссии. — Двигатель с открытым ротором является передовым для авиационной промышленности, так как отвечает двум важнейшим требованиям времени: снизить потребление топлива и повысить экологические показатели».
Среди других направлений работы Safran в части двигателей следует отметить UHBR (Ultra High Bypass Ratio) — турбореактивный двигатель с высокой степенью двухконтурности, благодаря которому потребление топлива снижается с 5 до 10 %. Этот двигатель является надежной опцией для авиаконструкторов на перспективу до 2025 года по причине возможности его интеграции в современные самолеты.
В Группе также ведутся работы по направлениям классических, электрических и гибридных двигателей.
В Истре Safran располагает новым испытательным стендом площадью 80 000 квадратных метров, единственным в Европе, на котором можно проводить испытания двигателя LEAP и его модификаций, технологических прототипов двигателей Open Rotor и UHBR, а также изделий сложной конструкции и больших размеров. Этот новый стенд, строительство которого было закончено в 2016 году, являет собой отражение динамизма региональной политики при значительной поддержке властей, с привлечением местных представителей промышленности и высших учебных заведений региона. Данный проект, являясь важным для региона, привел, среди прочего, к созданию 45 рабочих мест непосредственно в компании Safran.
Этот новый стенд, строительство которого было закончено в 2016 году, являет собой отражение динамизма региональной политики при значительной поддержке властей, с привлечением местных представителей промышленности и высших учебных заведений региона. Данный проект, являясь важным для региона, привел, среди прочего, к созданию 45 рабочих мест непосредственно в компании Safran.
* Clean Sky является европейской научно-исследовательской программой с привлечением государственных и частных капиталов, запущена в 2008 году совместно Европейской Комиссией и представителями авиационной промышленности европейских стран.
** CFM56, LEAP – марки двигателей компании CFM International, совместного предприятия с равным долевым участием компаний Safran Aircraft Engines и GE.
|
Наименование характеристики |
ДМС-3 |
ДМС80 |
ДМС80К |
ДМС220 |
|---|---|---|---|---|
| Напряжение питания постоянного тока, В | 27 | 4,5(9) | 7(12)* | 24 |
| Электромагнитная редукция – число пар полюсов | 180 | 64 | ||
| Пусковой/максимальный синхронизирующий момент (Мп / Мм), Н×м | 200/240 | 0,025(0,05) | 0,05* | 1,0/1,5 |
| Сопротивление фазы, Ом | 13,5* | 10,3±1,0 | 10,5±1,0 | |
| Пусковой ток, А | 6,0 | 0,35(0,7) | 0,35* | 1,2 |
| Номинальный момент, Н×м | 150 | 0,02 | 0,04 | 0,8 |
|
Частота вращения при линейном напряжении, В: — номинальная, об/мин — холостого хода, об/мин |
27 2,5 10 |
6 10 60 |
12 10 60 |
18 10 60 |
|
Потребляемая мощность: пусковая/максимальная, Вт |
150/245 | 1,6/6,3 | 2,45* | 26/35,4 |
| Момент сопротивления при обесточенной обмотке, % к Мп | 12 | 20 | 15* | 4 |
| Пульсации момента, % к Мп | ±8 | - | 5 | 4 |
| Длительный перегрев обмоток при Мп, оС | 30 | 40* | 105 | |
| Максимальная допустимая температура двигателя, оС | 100 | 175 | ||
Тепловая постоянная, мин.
|
25 | 10 | 10 | 25 |
| Электромагнитная постоянная, мс | 90* | 0,5 | 1,5 | 4 |
| Рабочие углы поворота ротора | 360° | ±25° | 360° | ±(4-7)° |
| Тепловое сопротивление статора, оС/Вт | 1,1* | 13,16 | 0,28 | 5,53 |
| Коэффициент противо-ЭДС, В/об/мин | 2,7 | 0,0422 | 0,117* | 0,45 |
| Постоянная МД, Н×м/√Вт | 16,33 | 0,033 | 0,04 | 0,229 |
| Коэффициент момента, Н×м/А | 36,36 | 0,07 | 0,143 | 0,85 |
| Коэффициент использования, Вт/Н×м | 0,75 | 64 | 50 | 26 |
|
Масса, кг, не более в том числе ротора |
73 30 |
0,065 0,03 |
0,09 0,05 |
0,67 0,17 |
Ротор электродвигателя — устройство и принцип действия (120 фото)
Устройство всех моделей электродвигателя одинаково. Основу конструкции составляют статор (неподвижная часть) и ротор (вращающаяся). Статор всегда имеет обмотку, у ротора же она иногда отсутствует. На языке специалистов устройства без обмотки носят название короткозамкнутых, с ней называются фазными. Разберем более подробно узловые элементы электродвигателя.
Основу конструкции составляют статор (неподвижная часть) и ротор (вращающаяся). Статор всегда имеет обмотку, у ротора же она иногда отсутствует. На языке специалистов устройства без обмотки носят название короткозамкнутых, с ней называются фазными. Разберем более подробно узловые элементы электродвигателя.
Краткое содержимое статьи:
Узлы электродвигателя
Вал ротора имеет цилиндрическую форму и производится из стали. Металлические стержни, замыкающиеся с двух сторон, дают ему название – короткозамкнутый ротор. Указанная конструкция обеспечивает высокую степень защиты, поскольку не возникает необходимость частого технического обслуживания устройства, нет нужды в замене подающих ток щеток и т.д.
Если присмотреться к фото ротора электродвигателя, то он напоминает клетку для белки, откуда и название «беличья клетка». Конструкция представляет собой собранные стальные листы небольшой толщины. В специальные пазы помещается обмотка, которая может быть нескольких типов.
Определяющее значение имеет ответ на вопрос о том, каков двигатель – фазного или короткозамкнутого типа. Большее распространение имеют последние конструкционные новинки. Стержни из меди, имеющие большую толщину, помещаются в пазы без дополнительной изоляции. Медные кольца позволяют соединить концы обмотки.
Бывают ситуации, когда «беличья клетка» получает альтернативу в виде литья. Таково в целом устройство ротора электродвигателя короткозамкнутого типа.
Однако существуют модели моторов переменного тока с роторами фазного типа. Их используют крайне редко, в основном, из-за предназначения для более мощных двигателей. Еще одна причина, по которой используют фазные модели – необходимость создания значительного усилия во время пуска.
К основным причинам поломки двигателя асинхронного типа относят износ подшипников, в которых осуществляется вращение вала. Центровка или балансировка ротора электродвигателя осуществляется за счет установленных в статоре крышек. Двигатели также имеют подшипники для облегчения вращательных движений.
Кроме того устройство подразумевает установку крыльчатки, обеспечивающей должное охлаждение двигателя. Статор имеет специальные ребра, улучшающие отдачу тепла от нагреваемого устройства. Именно так обеспечивается работа моторов переменного тока в нормальных тепловых условиях.
Полноценное проведение диагностического осмотра мотора
Для того, чтобы осмотреть статор и другие центральные элементы электродвигателя, используют специальные козлы, оснащенные двумя катками в верхней своей части. Последние упрощают вращение деталей.
Самостоятельный ремонт мотора следует начинать с тщательного изучения всей технической документации. Далее определяется степень износа подшипников, обнаруживаются и устраняются иные дефекты.
Проверить ротор двигателя необходимо на предмет состояния всех металлических элементов, крепления пластин к валу, качества замкнутой проводки и, наконец, должного функционирования вентиляторов.
Технические работы ведутся с использованием набора специальных ключей, обыкновенного тестера и механизмов для подъема. Главное не забыть отключить мотор от сети. Все узлы очищаются от слоя пыли при помощи щеточек и обдуваются сжатым воздухом. В дальнейшем мелкие детали и все их крепления желательно складывать в отдельный ящик, чтобы избежать пропажи.
Ротор электродвигателя разбирается с учетом следующих рекомендаций. Как только щит будет отделен от корпуса двигателя, его сдвигают вдоль вала, стараясь не повредить изоляцию обмоток. Для этих целей используют картон высокой плотности, размещая его между статором и ротором, а впоследствии укладывая на него детали.
С вала также снимаются пружины и подшипники. Демонтируется обмотка короткозамкнутого типа и сердечник. Главным требованием при выемке ротора является аккуратное движение вдоль оси.
При проверке вентиляторов обращают внимание на целостность лопастей и надежность их крепления. Делается процедура при помощи молотка. Дефектные детали заменяются. Нельзя нарушать балансировку, поэтому перед осмотром необходимо сделать заметку на роторе, чтобы при сборе каждый элемент встал на свое место.
Ремонт
Ремонтные работы всего устройства выполняются с целью восстановления его функциональности и работоспособности. Иногда требуется замена некоторых деталей. Например, при нагреве статора по разным причинам, может образоваться нагар на конструкции якоря электродвигателя.
Последовательность шагов тогда следующая:
- демонтаж двигателя;
- очистные работы;
- разборка всех узлов;
- восстановление поврежденных частей;
- покраска;
- сборка двигателя и проверка его в нагрузочном режиме.
Если оборудование представлено фазным типом, то требуются ремонтные работы отдельным его узлам, в том числе и щеточно-коллекторному.
Если стержень имеет трещины, то он подлежит восстановлению или замене. Делается это так: на месте трещины проводится надрез и высверливание отверстий от точки этого надреза до торца замыкающего кольца. Та часть, которая оказалась высверленной, заполняется медным сплавом.
Не стоит забывать и о проверке двигателя на обрыв и короткое замыкание. Сопротивление ротора и статора проверяются при помощи омметра, сверяясь при этом с техническими характеристиками в инструкции по эксплуатации. Однако прибор должен быть крайне чувствителен ввиду стремления сопротивления к нулю в обмотках мощных моделей моторов.
Фото роторов электродвигателя
Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором – это двигатель, который можно регулировать с помощью добавления в цепь ротора добавочных сопротивлений. Обычно такие двигатели применяются при пуске с нагрузкой на валу, так как увеличение сопротивления в цепи ротора, позволяет повысить пусковой момент и уменьшить пусковые токи. Этим асинхронный двигатель с фазным ротором выгодно отличается от АД с короткозамкнутым ротором.
Статор (3) выполнен, так же как и в обычном асинхронном двигателе, он представляет из себя полый цилиндр, набранный из листов электротехнической стали, в который уложена трехфазная обмотка.
Ротор (4) по сравнению с короткозамкнутым, представляет из себя более сложную конструкцию. Он состоит из сердечника в который уложена трехфазная обмотка, аналогично обмотке статора. Отсюда название двигателя. Если двигатель двухполюсный, то обмотки ротора смещены геометрически друг относительно друга на 120. Эти обмотки соединяются с тремя контактными кольцами (2), расположенными на валу (5) ротора. Контактные кольца выполнены из латуни или стали, причем друг от друга они изолированы. С помощью нескольких металлографитовых щеток (обычно двух), которые расположены на щеткодержателе (1) и прижимаются пружинами к кольцам, в цепь вводятся добавочные сопротивления. Выводы обмоток соединяются по схеме «звезда».
Добавочное сопротивление вводится только при пуске двигателя. Причем им обычно служит ступенчатый реостат, сопротивление которого уменьшают с увеличением оборотов двигателя. Таким образом пуск двигателя осуществляется тоже ступенчато. После того, как разгон закончился и двигатель вышел на естественную механическую характеристику, обмотку ротора закорачивают. Для того, чтобы сохранить щетки и снизить потери на них, в двигателях с фазным ротором существует специальное устройство, которое поднимает щетки и замыкает кольца. Таким образом, удается повысить еще и КПД двигателя.
Добавочное сопротивление позволяет главным образом осуществить пуск двигателя под нагрузкой, работать с ним длительное время двигатель не может, так как механические характеристики слишком мягкие и работа двигателя на них нестабильна.
Для того чтобы автоматизировать пуск двигателя, в обмотку ротора включают индуктивность. В момент пуска, частота тока в роторе наибольшая, а значит и индуктивное сопротивление максимально. Затем, при разгоне двигателя, частота, как и сопротивление уменьшаются, и двигатель постепенно начинает работать в обычном режиме.
За счет усложнения своей конструкции, асинхронный двигатель с фазным ротором, обладает хорошими пусковыми и регулировочными характеристиками. Но по той же причине, его стоимость возрастает приблизительно в 1.5 по сравнению с обычным АД, кроме того увеличивается масса, размеры и как правило, уменьшается надежность двигателя.
Производство роторов | HECO All Systems Go
Когда дело доходит до электродвигателей, роторы являются одним из тех критически важных компонентов, которые должны быть в идеальном состоянии для эффективной работы двигателя. Если ротор выходит из строя или неисправен, его необходимо отремонтировать или заменить. Если вы только что узнали, что ротор одного из двигателей вашего предприятия вышел из строя, вот информация, необходимая для принятия осознанного решения о том, что делать дальше.
Краткий обзор роторов и статоров
Две из самых основных частей электродвигателя переменного тока — это ротор и статор.Ротор, как следует из названия, вращается; статор же остается неподвижным. Чтобы понять, как работает ротор, вам также необходимо знать о статоре.
Статор выглядит как полый цилиндр, состоящий из электромагнитов, расположенных так, что полюс каждого магнита обращен к центру группы магнитов. Ротор установлен на валу двигателя и расположен внутри статора с воздушным зазором между статором и ротором. Как и статор, ротор также состоит из электромагнитов, прилегающих к этим магнитам, обращенными к полюсам статора.Взаимодействие между магнитными полями ротора и статора вызывает вращение вала ротора и двигателя.
Ротор состоит из нескольких компонентов, но наиболее важными являются три части: стержни ротора, кольцо ротора и пластинки. Стержни ротора несут на себе индуцированный ток, вызванный статором.
Причины выхода из строя роторов
Роторысо временем изнашиваются, а их срок службы может быть сокращен из-за загрязнения, циклов нагрева и подобных проблем.Когда ротор выходит из строя, это чаще всего связано с стержнями ротора. Стержни ротора больше всего изнашиваются при частом запуске двигателя (и это намного усугубляется при полной или чрезмерной нагрузке). Поломки стержня ротора, переломы колец, изгиб ротора и дисбаланс — все это распространенные формы отказа ротора. Однако есть и другие вещи, которые могут выйти из строя, и их можно в значительной степени проследить до стержней ротора.
Почему не всегда рекомендуется ремонт ротора
Иногда ремонт ротора не рекомендуется или просто невозможен.В некоторых случаях ротор мог быть изготовлен на основе устаревшей конструкции, и существуют современные альтернативные конструкции ротора, которые позволят повысить производительность и сократить время простоя. В других случаях может случиться так, что повторный ремонт на протяжении многих лет ухудшил общую производительность ротора (например, его просто ремонтировали слишком много раз). В других случаях техники могли заметить, что просто ротор имеет очень плохую конструкцию, и ее не стоит ремонтировать. Что-то еще, что может произойти, — это обнаружить, что в стержнях или кольцах используются медные сплавы, которые больше не доступны.Однако все это зависит от рассматриваемого ротора.
Изготовление деталей для ротора
Ключевыми деталями, которые необходимо изготовить для нового ротора, являются стержни, кольца, вал и пластины. Однако материалы, используемые для этих деталей, почти так же важны, как и сама конструкция детали.
Оценка и выбор материалов
Одним из важных решений при производстве нового ротора является выбор правильного сплава, который будет использоваться для стержней и колец.В то время как медь является наиболее распространенным материалом, используемым для этих материалов, алюминий используется в небольших машинах. После ремонта в ремонтной мастерской обычно проводят испытание на проводимость или химический анализ стержней и колец для оценки химического состава материала и получения точного соответствия. Пластины обычно изготавливаются из специального изолированного стального сплава.
Стержни ротора и закорачивающие кольца
Стержни ротора должны изготавливаться в соответствии со спецификациями точности, включая механические, размерные и химические свойства.То же самое можно сказать и о закорачивающих кольцах, которые сложнее изготовить из-за их формы. Первоначальную форму закорачивающего кольца обычно получают литьем (включая вертикальное, горизонтальное и цилиндрическое) или формовкой.
Валы
Большинство валов ротора изготавливаются из высококачественной легированной стали, но для достижения наилучших характеристик используется сталь AISI 4140 или 4340, которая обычно подвергается термообработке. Термическая обработка используется для достижения определенной глубины твердости и общей прочности вала, а также для измельчения вала до надлежащей кристаллической микроструктуры.
Ламинирование
Пластины обычно представляют собой изолированный стальной сплав, и их первоначальная форма формируется в процессе штамповки, хотя для получения высокоточных размеров можно использовать лазерную резку.
Окончательная обработка
Окончательная форма прутков и колец достигается за счет прецизионной обработки. Обратите внимание, что формовка рекомендуется для применений, в которых используются тяжелые условия эксплуатации или высокая частота вращения.
Процесс производства ротора
Вот краткий обзор последовательности этапов изготовления ротора:
- Литье прутков и колец
- Штамповка или лазерная резка ламелей
- Осмотр отдельных деталей
- Укладка, разбивка и перекос листов
- Склеивание
- Пайка
- Окончательная сборка
- Динамическая балансировка
- Заключительный осмотр
HECO производит роторы
Наши технические специалисты HECO могут не только устранить неисправности и отремонтировать роторы, но мы также можем спроектировать и изготовить индивидуальный ротор в соответствии с вашими потребностями.Мы можем оценить и модернизировать ваш существующий ротор для повышения производительности и значительного сокращения времени простоя, используя последние отраслевые стандарты. Фактически, мы специализируемся на разработке новых конструкций индукционного ротора для проблемных приложений. Типичные конструктивные изменения включают усовершенствования стержней ротора, закорачивающих колец, вала и пластин. Среди ключевых факторов, которые мы учитываем, — расчеты магнитной цепи статора и ротора, расчеты повышения температуры, расчеты инерции пусковой нагрузки и электропроводность медных сплавов.Ни один камень не останется незамеченным, поскольку мы оцениваем существующие конструкции и улучшаем конструкцию вашего ротора.
Вращение ротора двигателей переменного тока
Как упоминалось в нашей предыдущей статье о вращающихся магнитных полях двигателей переменного тока, в этой статье будет рассмотрено, как магнитное поле на самом деле создает крутящий момент и вращает нагрузку. Если вы новичок в этой серии, вы можете начать с нашей статьи о конструкции двигателей переменного тока. В противном случае мы сразу перейдем к вращению ротора.
ПОСТОЯННЫЙ МАГНИТ
Чтобы проиллюстрировать, как работает ротор, представьте себе установку магнита на вал в качестве замены ротора с короткозамкнутым ротором.Как подробно рассказывалось в нашей последней статье, когда энергия проходит через обмотки статора, образуется вращающееся магнитное поле. Вращающееся магнитное поле, образованное обмотками статора, затем будет взаимодействовать с отдельным магнитным полем, создаваемым установленным на валу магнитом. Это взаимодействие между магнитными полями следует основам моторного магнетизма и полярности.
Например, южный полюс магнита притягивается к северному полюсу вращающегося магнитного поля. Точно так же северный полюс магнита притягивается к южному полюсу вращающегося магнитного поля.В результате магнит может вращаться, когда его тянет вращающееся магнитное поле. Эта конструкция, используемая в некоторых двигателях, известна как синхронный двигатель с постоянными магнитами.
ЭЛЕКТРОМАГНИТ НАПРЯЖЕНИЯ НАПРЯЖЕНИЯ
Теперь давайте вернем ротор с короткозамкнутым ротором вместо установленного на валу магнита. В основном они ведут себя одинаково. Если на статор подается электричество, ток будет проходить через обмотку и расширять электромагнитное поле. Это расширенное поле будет пересекать стержни ротора.
Напряжение (или электродвижущая сила [ЭДС]) индуцируется, когда стержень ротора или другой тип проводника попадает в магнитное поле. В стержне ротора индуцированное напряжение создает ток. Ток протекает через стержни ротора и вокруг концевого кольца. По мере протекания тока вокруг каждого стержня ротора создается больше магнитных полей.
В цепи переменного тока ток регулярно меняется по направлению и величине. Вот почему ток также вызывает регулярное изменение полярности магнитного поля ротора и статора.В результате ротор с короткозамкнутым ротором образует электромагнит с чередующимися северным и южным полюсами.
На рисунке ниже представлен момент времени, когда ток через обмотку A1 создает северный полюс. Увеличивающееся магнитное поле распространяется по соседнему стержню ротора, что индуцирует напряжение. В результате в зубе ротора создается магнитное поле южного полюса. Затем ротор следует вращающемуся магнитному полю статора.
SLIP
Поскольку ротор следует вращающемуся магнитному полю статора, необходимо различать скорость.Причина этого в том, что если бы оба они вращались с одинаковой скоростью, они бы не разделяли относительное движение. Без относительного движения никакие линии магнитного потока не будут обрезаны, а ротор не получит индуцированного напряжения. Различие в скорости известно как «скольжение». НЕОБХОДИМО СКОЛЬЖЕНИЕ ДЛЯ СОЗДАНИЯ МОМЕНТА МОМЕНТА . Величина нагрузки определяет скольжение. Если величина нагрузки увеличивается, скольжение увеличивает или замедляет ротор. При уменьшении нагрузки скольжение уменьшится или ускорит ротор. Скольжение отображается в процентах и рассчитывается по формуле ниже.
В качестве примера представьте, что четырехполюсный двигатель 60 Гц имеет синхронную скорость (NS) 1800 об / мин. Предположим, что частота вращения ротора (при полной нагрузке) составляет 1765 об / мин (NR). Если следовать формуле, скольжение составляет 1,9%.
ДВИГАТЕЛЬ РОТОРА С НАБИВКОЙ
Теперь давайте отойдем от более распространенного ротора с короткозамкнутым ротором и рассмотрим ротор с обмоткой. Одно из отличий ротора с обмоткой от ротора с короткозамкнутым ротором состоит в том, что он состоит из катушек, а не стержней. Эти катушки подключены к внешним переменным резисторам через щетки и контактные кольца.Напряжение индуцируется в обмотках ротора вращающимся магнитным полем. Скорость двигателя можно регулировать, увеличивая или уменьшая сопротивление обмотки ротора:
- Скорость двигателя может быть уменьшена на увеличена сопротивление обмоток ротора, что вызывает меньший ток.
- Скорость двигателя может быть увеличена на уменьшена сопротивление обмоток ротора, что позволяет пропускать больший ток.
Третий тип двигателя переменного тока — это синхронный двигатель, который не является асинхронным.Один тип построен аналогично ротору с короткозамкнутым ротором; однако он имеет обмотки катушки И стержни ротора. Щетки и контактные кольца подключают обмотки катушки к внешнему источнику постоянного тока. Когда к статору подается переменный ток, синхронный двигатель запускается подобно ротору с короткозамкнутым ротором. После того, как двигатель достигает максимальной скорости, на катушки ротора подается постоянный ток. Это создает сильное постоянное магнитное поле в роторе, которое соответствует вращающемуся магнитному полю. В результате ротор вращается с той же скоростью, что и вращающееся магнитное поле (или синхронной скоростью).Следовательно, нет пробуксовки. Различные типы синхронных двигателей имеют ротор с постоянными магнитами. В этом случае внешний источник постоянного тока не нужен, потому что ротор представляет собой постоянный магнит. Эти типы можно найти на синхронных двигателях малой мощности.
УЗНАТЬ БОЛЬШЕ О ДВИГАТЕЛЯХ ПЕРЕМЕННОГО ТОКАМы надеемся, что это руководство по вращению ротора двигателей переменного тока помогло вам лучше понять, как работают электродвигатели. Если вы хотите узнать больше, ознакомьтесь с другими нашими ресурсами, посвященными терминологии двигателей переменного тока и тому, как читать паспортные таблички электродвигателей.
Роторный двигатель— обзор
9.3.5 Двигатель с явным постоянным магнитом (двигатель PM / Rel)
В разделе 9.3.4 мы увидели, что для двигателя с возбужденным ротором и выступающим ротором только действующий реактивный крутящий момент вызвал ненагруженный ротор должен остановиться с прямой осью ротора, выровненной со статором mmf, то есть в том же положении, как если бы вращающий момент действовал отдельно. Это связано с тем, что ось с низким сопротивлением совпадает с прямой осью возбуждения. «Жесткость» характеристики крутящий момент-угол увеличивается за счет наличия реактивного крутящего момента, и в зависимости от относительных величин двух компонентов пиковый крутящий момент также может быть увеличен, как показано на рис.9.11, так что комбинация является привлекательным предложением.
Идея замены схемы возбуждения ротора более простыми постоянными магнитами при продолжении использования реактивного момента в принципе ясна, но на практике не так проста, как можно было бы ожидать. Чтобы магнитный поток проходил вдоль прямой оси ротора (то есть вдоль явного полюса), должен быть вставлен зазор для размещения магнита, и чем сильнее магнит, тем длиннее зазор. Это значительно увеличивает сопротивление прямой оси, что противоположно тому, что мы хотим, чтобы максимизировать крутящий момент сопротивления.
Тем не менее, мы уже говорили о том, что многие отрасли промышленности стремятся уменьшить свою зависимость от редкоземельных магнитов из-за опасений по поводу глобальной безопасности поставок. Эта неопределенность, вместе со стимулом предоставлять недорогие двигатели для растущего массового рынка (особенно в гибридных электромобилях), привела к возобновлению интереса к двигателям, которые сочетают в себе PM и реактивный крутящий момент. По сравнению с двигателем, работающим исключительно с постоянными магнитами, цель состоит в том, чтобы достичь сопоставимых характеристик с меньшим количеством магнитного материала: отношение крутящего момента PM к крутящему моменту реактивного сопротивления значительно варьируется (обычно от 4: 1 до 1: 1) в зависимости от детальной конструкции двигателя и применение, но в очень упрощенных терминах и, говоря очевидным, чем меньше материала магнита, тем выше доля реактивного момента.
Типичный шестиполюсный ротор показан на рис. 9.12: это, по сути, ротор индуктивного реактивного двигателя со скрытыми постоянными магнитами, сидящими в магнитопроводах. Например, если посмотреть на самый верхний полюс N на рис. 9.12, два его магнита эффективно соединены последовательно, а их прямая (магнитная) ось расположена вертикально. Помимо воздушного зазора, основная магнитная цепь, внешняя по отношению к каждой паре магнитов, имеет низкое сопротивление через «железо» сердечника, поэтому в этом отношении мало компромиссов по сравнению с конструкцией, состоящей только из PM.Однако по конструктивным причинам на внешних концах магнитопроводов должен быть мост из материала магнитного сердечника, и это неизбежно создает привлекательное короткое замыкание для некоторой части магнитного потока, который, таким образом, отклоняется от его полезного пути через статор. Эта область остается насыщенной и непродуктивной с точки зрения крутящего момента.
Рис. 9.12. Шестиполюсный двигатель PM / Rel.
Что касается аспекта сопротивления, прямая ось (низкая индуктивность) показана пунктирными линиями, а упомянутый выше мост снова представляет собой нежелательный путь короткого замыкания для магнитного потока, создаваемого статором, но, по сути, это точно так же, как это было бы в реактивном двигателе с магнитным потоком.Если бы реактивный момент действовал сам по себе, ненагруженный ротор остановился бы вместе с m.m.f статора. выровнен с пунктирной линией цепи, но если PM действует в одиночку, ненагруженный ротор остановится с полюсом N, выровненным с m.m.f статора. Таким образом, в отличие от двигателя с явным возбуждением ротора, где положения равновесия совпадают, теперь у нас есть два различных положения с нулевым крутящим моментом, разделенных на 90 ° (эл.).
Очевидно, существует потенциальная путаница относительно того, какая ось является прямой. На первый взгляд, у нас есть два конкурирующих соперника с противоречивыми утверждениями: лагерь сопротивления утверждал бы, что это была пунктирная линия на рис.9.12, хотя поклонники PM утверждали, что это была ось, проходящая через центр полюсов магнита. На практике обычно предпочтительнее второе, т.е. прямая ось определяется так же, как и для чисто PM машины.
Мы можем получить общее представление о форме общей характеристики крутящий момент-угол, наложив отдельные кривые сопротивления и PM, как показано на рис. 9.13, но мы должны принять, что это только приближение, поскольку оно игнорирует эффекты насыщения в магнитных цепях.
Рис. 9.13. Комбинированное сопротивление и крутящие моменты на постоянных магнитах.
Корпус возбужденного ротора показан на рис. 9.13 для сравнения с двигателем PM / Rel, и, как мы уже видели в разделе 9.3.4, результирующая кривая крутящего момента-угла для возбужденного ротора более жесткая по сравнению с устойчивым нулевым значением. положение крутящего момента, а области движения и торможения расположены симметрично, с равными максимальными углами крутящего момента для движения и торможения γ m и γ b , соответственно.
Наша цель — выделить фундаментальные различия между характеристиками крутящего момента двигателя с возбужденным ротором и двигателя с постоянным / постоянным током, поэтому мы произвольно выбрали компоненты сопротивления и крутящего момента, чтобы они имели одинаковую амплитуду.(На практике двигатель с возбужденным ротором будет иметь гораздо меньший реактивный крутящий момент, тогда как соотношение компонентов крутящего момента для двигателя с постоянным / относительным током может быть выше или ниже.)
Сдвиг на 90 ° между кривыми сопротивления и PM приводит к различным результатам. стабильные рабочие зоны для корпуса ПМ, а также новые положения покоя с нулевым моментом. Пиковый двигательный и тормозной моменты остаются такими же, как и для случая возбужденного ротора, но они больше не симметричны относительно одного положения равновесия покоя. Максимальный угол крутящего момента двигателя обозначен как γ m , а максимальный тормозной момент обозначен как γ b .Следовательно, когда приводу требуется изменение крутящего момента с максимального крутящего момента двигателя на максимальный тормозной момент, система управления (см. Раздел 9.6) изменит положение вектора тока статора относительно ротора на угол κ, показанный на нижней диаграмме.
По-прежнему ведется большая работа и проявляется интерес к этой новой технологии, и пройдет некоторое время, прежде чем наконец появятся оптимизированные решения для различных областей применения.
Двигатель с обмоткой ротора: Что это такое?
Двигатель с фазным ротором — это разновидность трехфазного асинхронного двигателя, предназначенная для обеспечения высокого пускового момента для нагрузок с высокой инерцией при очень низком токе.
Двигатели с фазным ротором также называют двигателями с фазным ротором.
Статор двигателя с фазным ротором такой же, как у обычного асинхронного двигателя, но ротор имеет трехфазную обмотку, причем каждый из выводов обмотки подключен к отдельным контактным кольцам. Напротив, традиционный асинхронный двигатель (он же «двигатель с короткозамкнутым ротором») имеет обмотки, которые постоянно закорочены концевым кольцом.
Контактные кольца двигателя с фазным ротором содержат щетки, которые образуют внешнюю вторичную цепь, в которую может быть добавлено полное сопротивление (сопротивление).Во время пуска это сопротивление включается последовательно с обмотками ротора. Это добавленное сопротивление заставляет ток ротора идти по фазе с током статора, что увеличивает развиваемый крутящий момент. Но добавленное сопротивление также уменьшает ток во вторичной цепи, поэтому очень высокий пусковой момент может быть получен с низким пусковым током .
Ротор двигателя с фазным ротором имеет трехфазные обмотки, которые соединены с контактными кольцами.Изображение предоставлено: TMEIC
Традиционным асинхронным двигателям с короткозамкнутым ротором при запуске может потребоваться от 400 до более 1000 процентов тока полной нагрузки.
Если полное сопротивление вводится во вторичную цепь при работающем двигателе, ток ротора уменьшается, а скорость двигателя уменьшается. Но по мере того, как скорость двигателя уменьшается, в обмотках ротора индуцируется большее напряжение, и вырабатывается больше тока для создания необходимого крутящего момента при этой пониженной скорости.
Постепенно уменьшая сопротивление , позволяет двигателю набрать нормальную рабочую скорость, обеспечивая плавное ускорение нагрузки. Поддерживая некоторое сопротивление во вторичной цепи, можно до определенного предела контролировать скорость. Но этот метод регулирования скорости теряет свою эффективность по мере увеличения скорости — примерно до 50 процентов номинальной скорости при полной нагрузке. Когда сопротивление во вторичной цепи полностью закорочено, двигатель электрически ведет себя как традиционный двигатель с короткозамкнутым ротором.
Контактные кольца образуют вторичный внешний контур. Добавление сопротивления в эту цепь изменяет кривую крутящего момента двигателя.Недостатками двигателей с фазным ротором являются сложность и необходимость технического обслуживания контактных колец и щеток по сравнению с традиционными двигателями с короткозамкнутым ротором. Однако двигатели с фазным ротором полезны в приложениях с высокими инерционными нагрузками, таких как большие вентиляторы, насосы и мельницы, поскольку конструкция с фазным ротором позволяет постепенно ускорять нагрузку за счет управления скоростью и крутящим моментом.И они могут развивать очень высокий пусковой крутящий момент в состоянии покоя с низким пусковым током. Хотя в настоящее время преобладают традиционные асинхронные двигатели с приводами с регулируемой скоростью, двигатели с фазным ротором также могут использоваться для приложений с регулируемой скоростью, если не требуется очень точное управление скоростью.
Изображение предоставлено: TECO-Westinghouse Motors, Inc.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе.Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Британская энциклопедия, Inc.Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки.В момент t 1 на рисунке, ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, тогда как в фазе b и фазе a значение составляет половину положительный.Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников. Поскольку проводники ротора закорочены друг с другом на каждом конце, в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника.На этом рисунке показана диаграмма токов ротора для моментов времени t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Полный ток статора в каждой фазной обмотке складывается из синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты, построив машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, передаваемый от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Что такое двигатель с фазным ротором и как он работает?
Электродвигатели — машины, преобразующие электричество в механическую энергию — повсеместно используются в мире машиностроения. Они являются краеугольным камнем инженерных достижений, таких как лифты, насосы и даже электромобили, благодаря способности использовать эффект электромагнитной индукции. Эти так называемые асинхронные двигатели используют переменный ток и электромагнетизм для создания вращательного движения и имеют множество конфигураций. Особый тип асинхронного двигателя переменного тока, известный как двигатели с фазным ротором, будет в центре внимания этой статьи.Хотя эти двигатели используются только в особых случаях, они имеют явное преимущество перед другими популярными вариантами (с короткозамкнутым ротором, синхронными двигателями и т. Д.) Благодаря своим уникальным характеристикам. Будут изучены анатомия и принцип действия этих двигателей, а также конкретные характеристики, которые делают их столь важными для приложений, в которых не могут быть реализованы другие, более популярные асинхронные двигатели.
Что такое двигатели с фазным ротором?
Двигатели с фазным ротором представляют собой специализированный тип двигателей переменного тока и работают во многом так же, как и другие асинхронные двигатели.Они состоят из двух основных компонентов: внешнего статора и внутреннего ротора, разделенных небольшим воздушным зазором. Статор, как правило, одинаков для всех асинхронных двигателей и состоит из металлических пластин, удерживающих на месте обмотки из медной или алюминиевой проволоки. В статоре есть три отдельные катушки, которые питаются трехфазным переменным током, что просто означает, что каждая из них питается от отдельного переменного тока. Это не всегда так, поскольку некоторые двигатели являются однофазными двигателями, но двигатели с фазным ротором обычно всегда трехфазные.Тем не менее, эти три фазы создают магнитное поле, которое смещается вместе с переменными токами. Это создает вращающееся магнитное поле (RMF), которое действует на ротор. В двигателях с фазным ротором ротор «намотан» проводом, похожим на статор, а их концевые выводы соединены с 3 контактными кольцами на выходном валу. Эти контактные кольца прикреплены к щеткам и блокам резисторов переменной мощности, где операторы могут изменять скорость двигателя, изменяя сопротивление через катушки ротора. Эти контактные кольца позволяют регулировать скорость и крутящий момент и являются определяющей особенностью двигателей с фазным ротором (именно поэтому эти двигатели часто называют двигателями с фазным ротором).
Как работают двигатели с обмоткой ротора?
Мы рекомендуем прочитать нашу статью об асинхронных двигателях, чтобы понять основные законы, общие для всех асинхронных машин, но в этой статье кратко объясняется наука, лежащая в основе работы двигателя с фазным ротором.
Эти двигатели классифицируются как асинхронные двигатели, в которых существует несоответствие (известное как «скольжение») между скоростью RMF статора (синхронная скорость) и выходной скоростью (номинальная скорость). При создании необходимого тока, напряжения и магнитной силы в обмотках ротора двигатель всегда будет испытывать скольжение между вращающимся полем и ротором.Не стесняйтесь посетить нашу статью о типах двигателей переменного тока, чтобы узнать больше.
Двигатели с фазным ротором отличаются тем, как их ротор взаимодействует со статором. Обмотки ротора подключены к вторичной цепи, содержащей контактные кольца, щетки и внешние резисторы, и питаются от отдельного трехфазного переменного тока. При запуске внешнее сопротивление, передаваемое этой вторичной цепи, приводит к тому, что ток ротора снижает силу RMF статора (он работает более «синфазно» с RMF статора).Это означает, что скорость вращения можно контролировать, изменяя сопротивление, когда двигатель достигает 100% скорости, что позволяет операторам выбирать пусковой момент и рабочие характеристики. Это приводит к плавному запуску, высокому начальному крутящему моменту, низкому начальному току и способности регулировать скорость вращения, чего нельзя достичь с помощью более простых конструкций, таких как двигатели с короткозамкнутым ротором (более подробную информацию об этой конструкции можно найти в нашей статье на двигателях с короткозамкнутым ротором).
Технические характеристики двигателя с фазным ротором
Спецификации двигателя с фазным ротором включают понимание спецификаций всех асинхронных двигателей, которые можно просмотреть в нашей статье об асинхронных двигателях.В этой статье будут освещены важные концепции двигателей с фазным ротором, которые необходимо понять перед покупкой одного из них, но помните, что это не все.
Пусковой ток
Статор RMF вращается на полной скорости при запуске трехфазного асинхронного двигателя, в то время как ротор изначально находится в состоянии покоя. Ротор испытывает индуцированный ток, когда через него проходит RMF статора, и единственным ограничивающим фактором этого тока является сопротивление обмоток ротора (ток = напряжение / сопротивление).Это приводит к большему току в роторе, что увеличивает потребность в токе статора и, следовательно, вызывает «бросок» пускового тока в двигатель. Этот ток может быть в два-семь раз выше номинального тока, указанного на паспортной табличке, и может вызвать серьезные проблемы при высоком напряжении. Когда двигатель достигает своей номинальной скорости, ротор генерирует в статоре «обратную ЭДС», которая снижает ток статора до номинального уровня. Пусковой ток — это то, что минимизируется в двигателях с фазным ротором за счет увеличения сопротивления обмоток ротора (I = V / R, где R увеличивается), и почему они имеют такие плавные пусковые характеристики.
Крутящий момент двигателя и кривая крутящего момента-скорости
Самая важная спецификация двигателей с фазным ротором — это то, как они работают при включении, и это визуализируется с помощью графиков крутящего момента-скорости. Асинхронные двигатели могут значительно превышать как их номинальный крутящий момент, так и ток, когда скорость не 100%; Кривые крутящего момента / скорости отображают это переходное поведение, а на Рисунке 1 показана общая кривая крутящего момента / скорости для асинхронных двигателей с обозначенными важными точками.
Рисунок 1: Кривая крутящий момент-скорость для асинхронных двигателей.
Пусковой крутящий момент — это крутящий момент, возникающий при начальном броске тока, который всегда превышает номинальный крутящий момент. Вытягивающий момент — это максимальный крутящий момент, достигнутый до установившегося режима, а номинальный крутящий момент — это то, что обеспечивается, когда двигатель достигает 100% скорости. Эта связанная скорость не совсем равна синхронной скорости RMF, и это скольжение показано на рисунке 1.
Двигатели, в которых используются популярные конструкции с короткозамкнутым ротором, имеют ограниченный контроль над кривыми крутящего момента и скорости (подробнее см. В нашей статье о двигателях с короткозамкнутым ротором).Стержни ротора с короткозамкнутым ротором закорочены; это приводит к невозможности изменить сопротивление ротора, а это означает, что единственный способ повлиять на скорость вращения — это изменить напряжение (I = V / R, где R является постоянным). Это может вызвать проблемы в больших двигателях, где необходимый входной ток может стать опасно высоким. Двигатели с фазным ротором решают эту проблему, изменяя сопротивление ротора с помощью вторичной цепи, присоединенной к блоку сопротивления переменной мощности и контактным кольцам. За счет увеличения сопротивления в роторе через контактные кольца, тяговый момент может быть достигнут на гораздо более низких скоростях, что обеспечивает более высокий начальный крутящий момент и более низкий пусковой ток.При достижении синхронной скорости сопротивление ротора также может быть закорочено, в результате чего двигатель с фазным ротором ведет себя так, как будто это двигатель с короткозамкнутым ротором. На рис. 2 показано влияние увеличения сопротивления ротора на выходной крутящий момент.
Рис. 2: Как изменение сопротивления ротора влияет на пусковой и отрывной крутящий момент.
Из этого графика видно, что двигатель с фазным ротором обеспечивает управление током, крутящим моментом и скоростью намного лучше, чем другие конструкции. Изменяя сопротивление, этим двигателям потребуется меньший начальный пусковой ток для компенсации, они будут иметь более сильный пусковой крутящий момент и могут максимизировать свой пусковой крутящий момент, также сделав его крутящим моментом отрыва (пример кривой R2 на рисунке 2).Такой подход приводит к созданию двигателя с регулируемой скоростью, высоким пусковым моментом и низким пусковым током, с возможностью изменять эти характеристики по желанию оператора.
Заявки и критерии отбора
Двигатели с фазным ротором могут справиться с тем, что другие асинхронные двигатели не могут, а именно с регулированием скорости, тока и крутящего момента. Способность увеличивать сопротивление ротора при запуске двигателя позволяет плавно разгонять тяжелые нагрузки до номинальной скорости. Когда необходимо минимизировать пусковой ток или имеется ограничение пускового тока ниже, чем могут выдержать двигатели с короткозамкнутым ротором / синхронные двигатели, рассмотрите возможность использования двигателя с фазным ротором.
У двигателей с фазным ротором есть недостатки, и они являются следствием их сложной конструкции. Вторичный контур создает больше возможностей для ошибки, а щетки с контактным кольцом могут представлять опасность, если не проверять их регулярно (изношенные щетки могут вызвать искрение и увеличить риск возгорания). Эти двигатели также дороги в обслуживании, что увеличивает их и без того дорогостоящую цену. Их сложность также снижает общий КПД двигателя, и двигатель с короткозамкнутым ротором следует выбирать, если эффективность является основной проблемой или конструктивным ограничением.
Хотя двигатель с фазным ротором и его регулируемые характеристики крутящего момента и скорости вращения являются дорогими и менее эффективными, они отлично подходят для управления большими шаровыми мельницами, большими прессами, насосами с регулируемой скоростью, кранами, подъемниками и другими высокоинерционными нагрузками. Они также отлично подходят для любого приложения, которому нужен плавный запуск и возможность изменять скорость. Они охватывают основы, недоступные для других асинхронных двигателей, и бесценны для разработчиков, которым необходим абсолютный контроль над скоростью и крутящим моментом.
Сводка
В этой статье представлено понимание того, что такое двигатели с фазным ротором, как они работают и каковы их основные характеристики, определяющие, когда они должны быть указаны по сравнению со стандартными асинхронными двигателями.Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://www.egr.unlv.edu/~eebag/Induction%20Motors.pdf
- https://oaktrust.library.tamu.edu/bitstream/handle/1969.1/163595/T17123-130.pdf? sequence = 1 & isAllowed = y
- http://www.animations.physics.unsw.edu.au/jw/electricmotors.html
- https://scholar.cu.edu.eg
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно.Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом.Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или проконсультироваться с вашим системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу.Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файлах cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта.Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
.