Первые полноуправляемые версии, что появились среди модификаций автомобилей Honda Prelude в 1987 году, снабжались механической системой с хитроумной кинематической связью между рулевыми рейками передних и задних колес. Кстати, тогда же на японском рынке произошел настоящий полноуправляемый бум: Mitsubishi Galant и Sigma, Mazda 626, а два года спустя и Toyota Celica — все обзавелись версиями с управляемыми задними колесами. Применение систем управления всеми
четырьмя колесами преследует три цели. Первая — получить переменную
чувствительность автомобиля к повороту руля. Ведь при тихой езде по
городским улочкам лучше иметь «острое» рулевое управление— чтобы не
накручивать баранкой при каждом маневре. А на автостраде «острый» руль
может вызвать проблемы — машина будет слишком резко реагировать даже на
небольшие подруливания. Вторая цель — улучшить маневренность автомобиля
при парковке или развороте в стесненных городских условиях, то есть
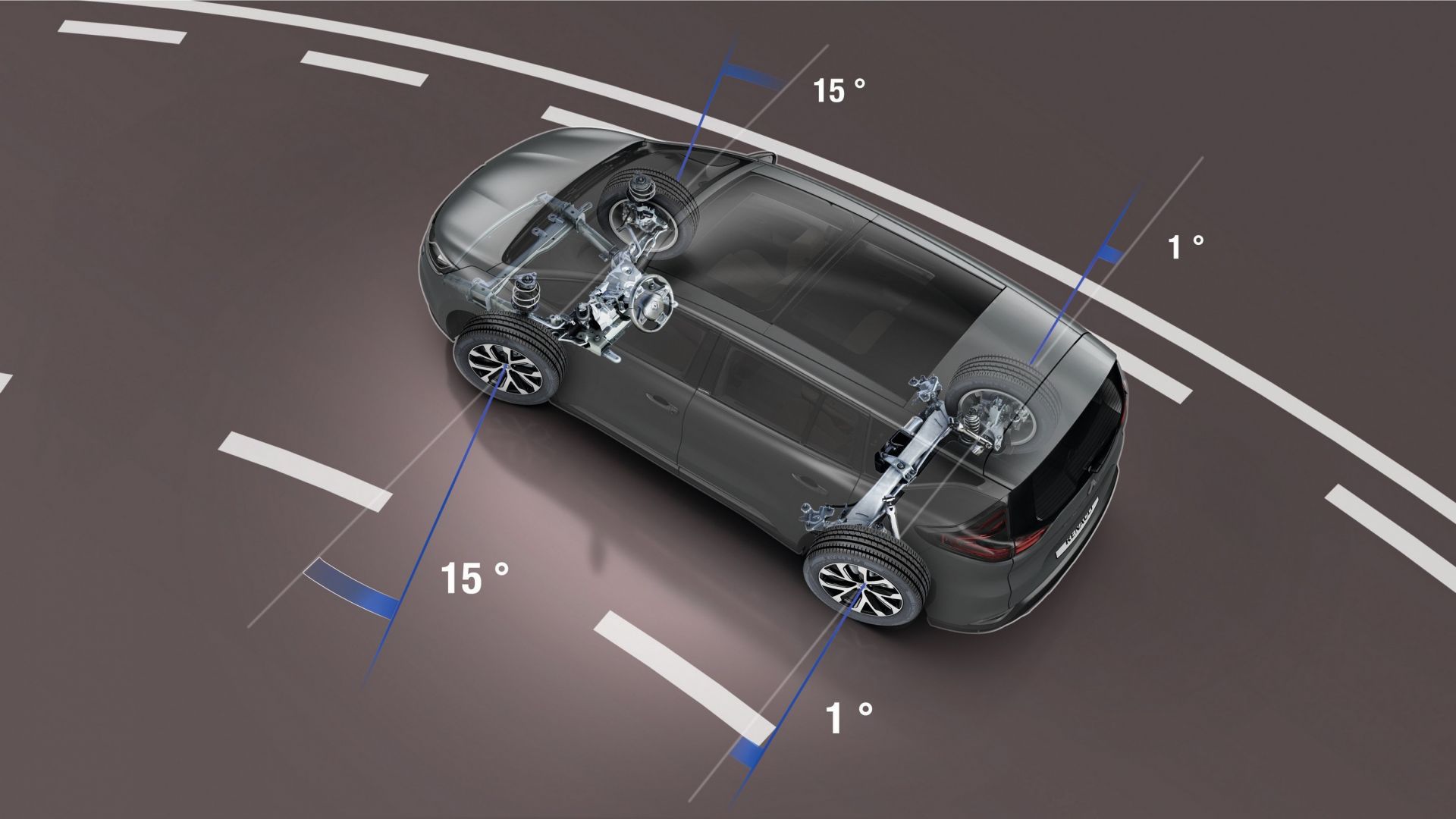
уменьшить радиус поворота. Нынешняя система 4WS (4 Wheel Steer, то есть 4 управляемых колеса), устанавливаемая по заказу на купе Honda Prelude 2,2 VTi, является развитием предыдущей электронноуправляемой системы, которая в 1991 году сменила механическую. Задние колеса здесь поворачиваются с помощью специального рулевого механизма с электроприводом, встроенного в довольно сложную заднюю подвеску. А управляет им специальный электронный блок, который получает от нескольких датчиков информацию о скорости автомобиля, об угле поворота руля, передних и задних колес автомобиля и т. д. Работает система 4WS в
двух режимах. На малой скорости задние колеса поворачиваются в сторону,
противоположную передним, и при маневре той же кривизны руль нужно будет
вращать на меньший угол. То есть чувствительность рулевого управления
будет выше, а вдобавок автомобиль станет более маневренным. К примеру,
при развороте передние колеса будут вывернуты до упора влево, а задние —
вправо на угол до восьми градусов. А при движении на большой скорости — в быстром вираже или при перестроении из ряда в ряд на автостраде, — задние колеса с помощью системы 4WS, наоборот, будут поворачиваться на небольшой угол в ту же сторону, что и передние. | 4WS: Поворот задних колес в ту же сторону, что и передних, позволяет сохранить направление и скорость движения центра масс автомобиля, но значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость |

4WS: история создания полноуправляемого шасси Honda
4WS (4 Wheel Steering) — система с помощью которой в управлении автомобилем участвуют все четыре колеса, а не два как обычно. Впервые такая система была применена на Honda Prelude в 1987 году.
История разработки
Испытательный барабанный стенд для отработки теоретической моделиВ 1973 году Министерство транспорта США запустило программу по созданию безопасного автомобиля будущего — Experimental Safety Vehicle. Хонда решила неофициально поучаствовать в программе, по тематике активных систем безопасности. В 1977 году, исследования вылились в два направления. В первом разрабатывалось активное рулевое управление, а во втором полноупрвляемое шасси. Разработкой последнего, занялись инженеры из исследовательского центра Honda Wako — Шоичи Сано и Осаму Фурукава.
Хонда решила неофициально поучаствовать в программе, по тематике активных систем безопасности. В 1977 году, исследования вылились в два направления. В первом разрабатывалось активное рулевое управление, а во втором полноупрвляемое шасси. Разработкой последнего, занялись инженеры из исследовательского центра Honda Wako — Шоичи Сано и Осаму Фурукава.
После проработки теории, инженеры выявили два базовых принципа работы полноупраляемого шасси. На низких скоростях до 30 км/ч, задние колеса должны поворачиваться в противоположную сторону от передних, а на высоких в ту же самую.
Ходовой прототип 1981 годаВ 1978 году, компания Хонда получила патент, а инженеры приступили к постройке первого ходового макета. В 1981 году он был создан на базе двух передних половинок Honda Accord. Как вспоминает Фурукава, у команды были опасения в эффективности и безопасности полноуправлемого шасси, но они оказались напрасны. Испытания показали состоятельность системы 4WS.
Как и все новое, система 4WS вызвала немалый скепсис даже среди высокопоставленных сотрудников компании. Но и здесь разработчики нашли выход из ситуации — они пригласили всех сомневающихся на закрытый тест драйв. После которого, скепсис сменился на одобрение и путь к серийному производству был открыт.
Но и здесь разработчики нашли выход из ситуации — они пригласили всех сомневающихся на закрытый тест драйв. После которого, скепсис сменился на одобрение и путь к серийному производству был открыт.
4WS первого поколения
Задний редуктор системы 4WSСпустя шесть лет 4WS, появилась в качестве опции на Honda Prelude третьего поколения. Причем не дешевой, за нее приходилось доплачивать 216 тыс. йен.
Принцип работы полноупраляемого шасси Honda Prelude довольно прост и изящен. Под днищем автомобиля проходил небольшой карданный вал, который связывал рулевую рейку и задний поворотный редуктор. При незначительном повороте руля задние колеса поворачивались на максимальный угол в 1,5° в одну сторону с передними, тогда как при парковке до 5° в противоположную.
Влияние на индустрию
Honda Prelude третьего поколенияБезусловно полноуправлямое шасси не является изобретением компании Хонда. Еще в начале XX века выпускались грузовики, трактора и другая колесная техника с поворотными колесами. Но именно Хонды конца 80-х с системой 4WS, установили новый стандарт управляемости и послужили толчком, после которого другие компании стали внедрять аналогичные системы в своих машинах.
Но именно Хонды конца 80-х с системой 4WS, установили новый стандарт управляемости и послужили толчком, после которого другие компании стали внедрять аналогичные системы в своих машинах.
Технология 4WS (+HICAS) — Авто-потроха: что у машинок внутри?
Раскрыть…
HICAS (High Capacity Actively Controlled Steering) — технология 4WS фирмы Nissan, предназначенная прежде всего для повышения управляемости автомобиля в поворотах.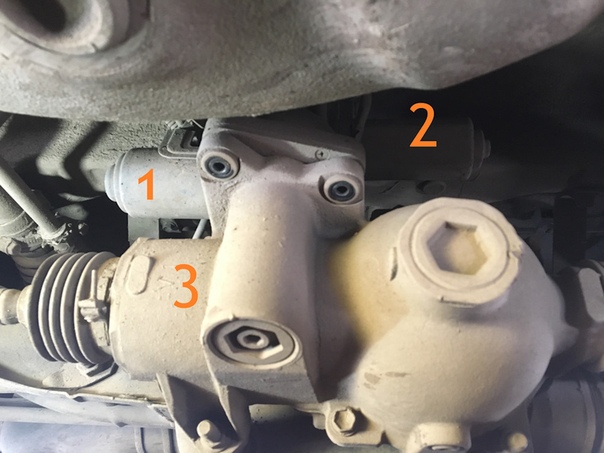 Применена на моделях Nissan и Infinity, начиная с 1986 года — Skyline GTS купе (GTS, GTS-R, GTS-X), Passage GT, Fairlady Z (300ZX), Cefiro (A31), 240SX, Silvia (S13 и S15), 180SX, Serena, Largo, Laurel, Stagea Autech Version, Q45, M45/M35 и G37.
Применена на моделях Nissan и Infinity, начиная с 1986 года — Skyline GTS купе (GTS, GTS-R, GTS-X), Passage GT, Fairlady Z (300ZX), Cefiro (A31), 240SX, Silvia (S13 и S15), 180SX, Serena, Largo, Laurel, Stagea Autech Version, Q45, M45/M35 и G37.
Ранние версии HICAS использовали гидравлический привод, запитанный от насоса ГУР и управляемый от датчика скорости.
Поздние версии HICAS, т.н. Super HICAS, используют электропривод на рулевой рейке, который конструктивно намного легче и управляется собственным компьютером. Обе системы, и HICAS и Super HICAS, ограничивают поворот задних колес углом в 10 градусов.
Цель HICAS — обеспечить устойчивое прохождение автомобилем поворотов на скорости за счет изменения поворачиваемости с нейтральной на избыточную при входе в поворот и на недостаточную на выходе. Это облегчает вход в поворот и выход из него под тягой.
Основной недостаток HICAS, кроме стоимости ее обслуживания и дополнительного веса — жесткая корреляция с размерностью колес, которая в «гражданском» варианте фиксирована, а в «гоночном» требует настройки в зависимости от вылета и ширины шины.
Диагностика HICAS
Раскрыть…
Прежде чем приступать к проверке HICAS, проверьте уровень жидкости в бачке ГУ. При необходимости — долейте. Марка используемой жидкости указана на крышке бачка. Двигатель должен быть прогрет, все нагрузки выключены, автомобиль установлен на ровной площадке, зажигание выключено, КПП в «нейтрали» (М/Т) или в «паркинге» (А/Т), передние колеса установлены прямо.
Если при включении зажигания лампа HICAS горит, то:
- R32: Проверьте уровень жидкости в резервуаре ГУРа (он же резервуар HICAS).
- R32 и R33: Проверьте все электрические соединения к HICAS.
Если лампа HICAS не гаснет, то необходимо зайти в режим диагностики:
- Включите зажигание, передача должна быть на нейтралке или в положении «P».
- Заведите двигатель.
- Очень быстро (в пределах 10 секунд) поверните руль влево/вправо на 20 или более градусов от центра 5 раз, затем нажмите и отпустите педаль тормоза 5 раз за те же 10 секунд (можно одновременно с движением руля), а затем нажмите педаль тормоза еще раз — это будет ввод в диагностический режим.

- Проедьте вперед и назад около 5 метров на скорости менее 10 км/ч для входа в полный режим диагностики и исключения ошибки датчика скорости.

После этих действий лампа HICAS на 5 секунд загорится, на 5 секунд погаснет и начнет моргать с интервалом около 1 секунды. Одновременно задние колеса начнут сами поворачиваться влево – вправо. Это позволяет проверять люфты и регулировать углы поворота.
Выход из диагностики в нормальный режим произойдет через 5 минут, либо если поехать быстрее 10км/ч, либо выключить зажигание.
[свернуть]
Коды диагностики HICAS 1989-1993
Раскрыть…
Всего вспышек будет 9, потом все повторится сначала. Если вспышка короткая (0,1 сек), то кода нет (т.е. если лампа просто моргает короткими вспышками, то все в порядке). Если вспышка длинная (примерно 1 сек), соответствующий код есть.
Например. Первая вспышка короткая, вторая, третья, четвертая тоже короткие, а пятая длинная, потом снова все остальные короткие. Это значит, что все позиции в списке (см.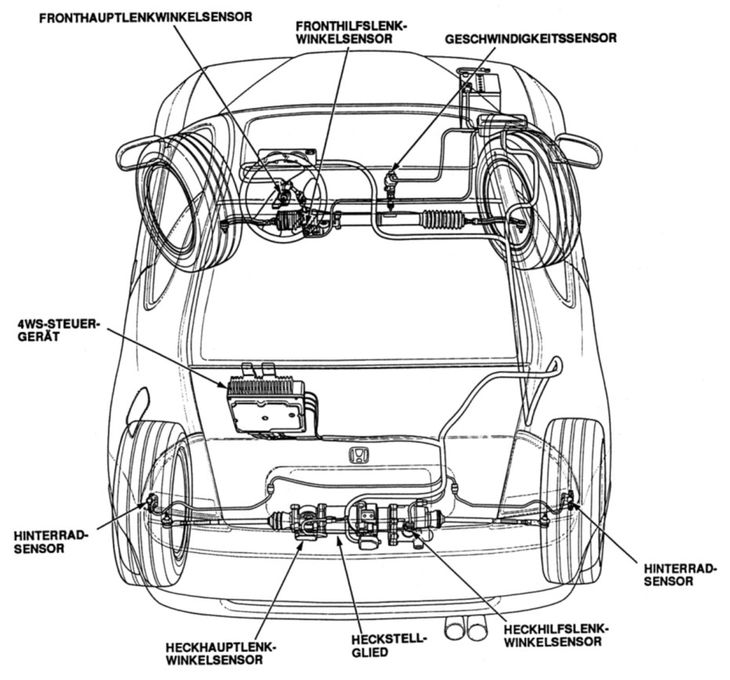 ниже) исправны, кроме пятой. Пятая позиция – это датчик скорости. Раз вспышка длинная, то он (или его цепи) неисправен.
ниже) исправны, кроме пятой. Пятая позиция – это датчик скорости. Раз вспышка длинная, то он (или его цепи) неисправен.
- 1. HICAS соленоид правый
- 2. HICAS соленоид левый
- 3. Отключен клапан
- 4. Соленоид ГУРа
- 5. Датчик скорости автомобиля
- 6. Датчик поворота руля
- 7. Датчик нейтрали КПП
- 8. (AT) Датчик стояночного тормоза, (MT) Датчик сцепления
- 9. (AT) Выключатель зажигания, (MT) Датчик нейтрали
[свернуть]
Коды диагностики HICAS 1993 — 1999
Раскрыть…
Лампа HICAS быстро мигает в случае отсутствия ошибок или выдает флеш-код ошибки (длинная вспышка = первая цифра ошибки, короткие вспышки = вторая цифра ошибки).
- 11. HICAS блок управления
- 12. Нет питания на моторчик HICAS
- 13. Недостаточная мощность моторчика HICAS
- 21. Отсутствует сигнал от датчика скорости автомобиля
- 22. Отсутствует сигнал от датчика положения руля
- 23. Отсутствует сигнал или находится в нейтрали датчик положения руля
- 24. Отсутствует сигнал от заднего главного входящего датчика
- 25. Отсутствует сигнал от заднего дополнительного датчика
- 31. Отсутствует сигнал от датчика стояночного тормоза
- 32. (AT) Отсутствует сигнал от выключателя зажигания, (MT) Отсутствует сигнал от датчика нейтрали
- 33. Отсутствует сигнал оборотов двигателя
 Отсутствует сигнал от заднего главного входящего датчика
Отсутствует сигнал от заднего главного входящего датчика[свернуть]
[свернуть]
«4 поворотных колеса»: история и развитие системы 4WS | АвтоИстория
Идея поворачивать с помощью все четырех колес, бродит в светлых умах инженеров еще начиная с 20-х годов прошлого века. Полноуправляемое шасси дает много преимуществ: автомобиль получается маневренным на низких скоростях и устойчивым на высоких. О трудностях и успехах в создании автомобилей с таким шасси я расскажу сегодня.
Nash QuadNash Quad
Первым автомобилем с поворотными задними колесами, принято считать американский грузовик Jeffery Quad, так же известный как Nash Quad. Созданный талантливым инженером Чарльзом Нэшем в 1913 году, он быстро завоевал популярность. Полноприводный, маневренный и с хорошей грузоподъемностью в 2 тонны, он как нельзя лучше подходил для службы в армии. Многие страны буквально выстраивались в очередь за этим грузовиком. Россия в 1915 году закупила около 30 автомобилей из которых в последствии были построены броневики.
Полноприводный, маневренный и с хорошей грузоподъемностью в 2 тонны, он как нельзя лучше подходил для службы в армии. Многие страны буквально выстраивались в очередь за этим грузовиком. Россия в 1915 году закупила около 30 автомобилей из которых в последствии были построены броневики.
Mercedes-Benz 170VL
В 1936 году Mercedes-Benz выпускает модель 170VL, в которой с помощью системы механических тяг, задние колеса могли поворачиваться уменьшая тем самым радиус поворота до 5 метров. Полноприводный 170VL, предназначался для нужд немецкой армии и был выпущен в количестве 500 штук.
Более современные механически-электронные системы начались разрабатываться только с 70-х, когда в 1973 году Министерство обороны США объявило о своем проекте ESV (Experimental Safety Vehicle), в рамках которого происходили поисковые работы на тему безопасного автомобиля будущего десятилетия. К программе подключились, множество автопроизводителей из 7 стран, в том числе и Япония.
Экспериментальный автомобиль Honda
Во время экспериментов, инженеры Honda определили, что выгоднее всего для обеспечения лучшей маневренности на малых скоростях поворачивать задние колеса в противоположную от передних сторону. А для большей устойчивости и безопасности на скоростях более 40 км/ч в ту же, что и передние. В 1981 году был создан первый прототип, который представлял собой две передние части Honda Accord соединенные в один автомобиль. Так была запатентована система управляемого шасси, которое получило название 4WS.
Honda PreludeHonda Prelude
Впервые такая система, дебютировала 7 лет спустя, на Honda Prelude третьего поколения. Она была полностью механической. Оценив преимущества такого шасси, другие японские производители начинают также активно работать над аналогичными решениями. Так Mazda в 1990 году представляют свою модель MX-6 GT, в которой в отличие от Хонды задние колеса поворачивались с помощью гидравлики. Впоследствии многие японские производители стали предлагать в качестве опции полноуправлемое шасси и в 90-х годах казалось, что система 4WS пришла в серьез и надолго, но почему же ее не встретить на современных машинах?
Впоследствии многие японские производители стали предлагать в качестве опции полноуправлемое шасси и в 90-х годах казалось, что система 4WS пришла в серьез и надолго, но почему же ее не встретить на современных машинах?
Mazda MX-6 GT
А тут все довольно просто, несмотря на высокую надежность этих систем на японских машинах, потребители не желали переплачивать за 4WS и не видели большого преимущества в ней. И логику простых водителей можно понять, при движении на стандартных скоростях выгода от нее не так очевидна.
Но не стоит переживать, полноуправляемое шасси никуда не делось, а переместилось в более дорогой сегмент, где служит на благо управляемости таким спорткарам как Lamborghini Aventador и Porsche 911 GT3.
Друзья, если вам понравилась статья, ставьте лайк 👍 и подписывайтесь на канал, благодарю за поддержку)
Читайте также:
«300 км/ч более 90 лет назад»: история рекордов скорости
«Тайна имени»: что означают названия автомобилей Toyota
Юбилей Mazda Miata, 5 коротких заметок о модели
Система Mazda 4WS — Мир авто
В этой системе задние колеса управляются при помощи гидравлического механизма с усилителем, который имеет электронное управление, в соответствии с углом поворота рулевого колеса и скорости автомобиля (рис. 18.5).
18.5).
Система Mazda является более сложной, чем предыдущая система, поэтому имеется больше деталей, которые могут сломаться, но как и у других подобных систем, в ней имеются специальные устройства защиты на случай поломки. В этой системе такие устройства имеют вид центральной блокирующей пружины и специального соленоида обеспечения безопасности.
В случае поломки гидравлической или электронной системы эти устройства устанавливают задние колеса в прямое положение.
В этой системе используются два электронных датчика, установленные на выходной вал коробки передач и привод спидометра, которые измеряют скорость автомобиля. Сигналы передаются на электронный модуль управления (ECU), который имеет встроенное устройство памяти, оно используется для «сообщения» гидравлической системе направления и угла, на который следует установить задние колеса.
 Когда достигается скорость 35 км/ч, задние колеса перемещаются в прямое положение. На скорости выше этой задние колеса поворачиваются при управлении в том же направлении, что и передние колеса, но угол поворота ограничен величиной 5°.
Когда достигается скорость 35 км/ч, задние колеса перемещаются в прямое положение. На скорости выше этой задние колеса поворачиваются при управлении в том же направлении, что и передние колеса, но угол поворота ограничен величиной 5°.Главные детали
На блок-схеме (рис. 18.6) изображены основные детали этой системы, используемые для управления задними колесами, к ним относятся:
1. Датчики скорости движения автомобиля.
2. Устройство управления фазой управления — передает клапану управления гидравлическим плунжером требуемый темп и направление перемещения.
4. Задний вал рулевого управления — передает положение передних колес к конической шестерне в фазе работы рулевого управления.
5. Регулирующий клапан (клапан управления) — управляет гидравлическим давлением, подаваемым к плунжерному цилиндру.

6. Гидравлический плунжерный цилиндр — управляет задними колесами в соответствии с заложенными требованиями.
Устройство управления фазой рулевого управления. Это устройство, изображенное на рис. 18.7, изменяет направление и угол поворота задних колес. От электрических импульсов, приходящих от электронного модуля управления к шаговому двигателю, и от перемещения передающегося от рулевого вала к конической шестерне, изменяется положение гидравлического регулирующего клапана, в соответствии с имеющимися условиями.
Honda Prelude
Обнаружен отключенный JavaScriptВы в настоящее время у вас деактивирован JavaScript. Некоторые функции системы работать не будут. Пожалуйста, активируйте JavaScript для использования всех возможностей системы.
Переключить Купля/Продажа и Услуги Купля/Продажа и Услуги
Купля/Продажа автомобилей |
| |
ЗапросЗапрашивайте необходимые запчасти |
| |
Продажа запчастей
|
| |
Кидалы, советы, правила продаж |
|
 Купля/продажа,
Купля/продажа,- 11 101 Всего сообщений
- 1 621 Всего пользователей
- Nadavaka Последний пользователь
- 195 Рекорд посещения
Посетителей онлайн: 26 (за последние 15 минут)
0 пользователей, 26 гостей, 0 анонимных пользователей (Просмотреть весь список)
Google, Bing, Yandex
- Правила форума
Рама MICHELIN DWT 4WS 245mm
Почему стоит покупать в магазине Роллерклуб
10 причин покупать ролики и аксессуары в магазинах Роллерклуб.
1. Гарантия качества.
У нас в магазине продаются только фирменные роликовые коньки, защита и аксессуары. Многие модели производятся в странах Азии (Китай, Тайланд, Вьетнам), но, как правило, разница между роликовыми коньками, произведенными на специальной линии после тщательной разработки инженерами компании с десяти (и более) летним опытом и просто «безвестными китайцами» — огромна. Мы продаем только продукцию мировых лидеров, таких фирм как K2, Rollerblade, Seba, Fila, Powerslide. На все роликовые коньки у нас распространяется официальная гарантия: от 6-ти месяцев до 1 года. В течении двух недель мы вернем деньги даже если роликовые коньки вам просто не подойдут, вы передумаете или по любой другой причине. Единственное ограничение — ролики должны сохранить товарный вид.2. Магазины в Москве и Санкт-Петербурге
. У нас 4 магазина в Москве и 2 в Санкт-Петербурге, где можно:- померять роликовые коньки и защиту (ролики тяжело подобрать без примерки, поэтому удобно расположенные магазины – наше важное преимущество),
- подобрать аксессуары,
- произвести мелкий ремонт роликов (бесплатно).

3. Доставка по всей стране
. Три года назад мы запустили интернет-магазин, в котором любой житель страны может выбрать ролики, проконсультироваться со специалистом и заказать доставку прямо до двери дома (осуществляется силами компании ЕМС). Несколько лет назад купить качественные ролики, расходные материалы (колеса, подшипники и т.п.) вне Москвы было практически невозможно, мы эту ситуацию исправили и ежегодно около 3000 человек пользуется услугами нашей интернет-площадки.4. Вклад в развитие Роллер спорта
. Наша компания основной спонсор Федерации Роллер Спорта, которая организовывает соревнования в России и странах СНГ, поддерживает спортсменов и команды, участвует в общественных движениях и социальных мероприятиях. Для нас ролики – больше чем просто товар, это важная часть нашей жизни и мы прикладываем массу усилий для развития этого направления.5. Профессионализм и компетентность.
Все наши консультанты – катаются на роликовых коньках. Для многих это не просто отдых, но и вид спорта, которому посвящается все свободное время. Большинство наших сотрудников работают в компании более 3 лет, так что более опытных и профессионально подготовленных специалистов найти просто невозможно.6. Собственная ремонтная мастерская.
Кроме безупречного следования гарантии производителя на все товары, которые продаются у нас в магазине мы открыли собственную мастерскую в магазине на улице 1905 года, в которой мы бесплатно отремонтируем ваши роликовые коньки, причем, даже если вы их купили не в наших магазинах. Просто, мы хотим чтобы вы катались и получали от спорта удовольствие.7. Статьи, обзоры, форум.
За годы работы мы накопили уникальную базу знаний по всем аспектам роллер спорта, от выбора роликовых коньков, сопутствующих товаров, до описания лучших мест катания в городах России, информации об обучении, обсуждение соревнований и их правил, поставщиков, брендов и множества нюансов роллер-жизни. Так же у нас есть ряд авторов, которые тестируют новое оборудование и пишут о нем непредвзятые обзоры, мы всегда подробно рассказываем обо всех знаковых событиях на рынке, а также, размещаем видео новости о роликовых коньках со всего мира.8. Отзывы клиентов.
Мы не скрываем ни хороших, ни плохих отзывов о работе наших магазинов, включая интернет-продажи. Любой человек может зайти и написать все, о чем он думает. С негативными отзывами мы работаем и чаще всего отчитываемся о решении проблемы – публично. Зайдите на специальный раздел на форуме и убедитесь в этом сами J9. Социальная ответственность.
Мы не ставим перед собой задачу быстро заработать максимальное количество денег и уехать отдыхать на Гоа. Мы понимаем, что компания несет социальную ответственность перед обществом, поэтому мы честно платим все налоги и сборы, официально привозим и растомаживаем товар, избегая «серых схем», участвуем в благотворительных мероприятиях, даем работу десяткам людей по всей стране. Нам нравится жить в России и мы ведем себя – соответственно10. Отношение к бизнесу
. Мы никогда не будем пытаться «впарить» вам самый дорогой товар. Мы хотим дать возможность людям заниматься прекрасным видом спорта и наша основная задача – обеспечить вас всем для этого необходимым. Если вам понравятся ролики, вы расскажете об этом друзьям, родственникам и коллегам, возможно, они захотят кататься вместе с Вами и тогда, не исключено что придут за оборудованием именно к нам.Системы рулевого управления на четыре колеса 1988 года
Из декабрьского 1987 года выпуска Car and Driver.
Немногие технические инновации так же быстро захватили воображение автомобильной промышленности, как рулевое управление всеми колесами. Хотя концепция управления колесами на обоих концах транспортного средства не является чем-то новым, ее разработка для серийных автомобилей не получила реального развития до 1983 года, когда Mazda представила свой демонстрационный автомобиль MX-02. С тех пор в таких машинах-мечтах, как Corvette Indy, Pontiac Pursuit и Peugeot Proxima — действительно, большинство шоу-автомобилей, которые были чем-то большим, чем просто стайлинг, — также использовалось управление четырьмя колесами.
Более того, по сравнению с другими современными разработками, такими как турбонаддув, полный привод и антиблокировочная система тормозов, рулевое управление на четыре колеса практически в мгновение ока превратилось из модного шоу-кары в реальность массового производства. Хонда выиграла гонку на рынке прошлым летом, когда представила Prelude Si 1988 года, на котором 4ws не является обязательным. Mazda почти сразу последовала их примеру с опциональными 4ws для нового 626 Turbo. Еще больше полноприводных моделей поступают от Nissan и Mitsubishi, а несколько других производителей в Соединенных Штатах и Европе, а также в Японии работают над своими собственными системами 4ws.
Спешка производителей к 4ws удивительна, учитывая тот факт, что до появления Prelude их клиенты не проявляли особого интереса к перспективе управлять всеми четырьмя колесами. А зачем им это? В отличие от турбонаддува, полного привода и ABS, преимущества которых легко понять, управление четырьмя колесами не является очевидным технологическим прорывом. Упомяните 4ws большинству людей, и вы получите пустые взгляды, если не смех, за которыми последуют саркастические вопросы о том, заставит ли это их машины катиться боком по дороге.
На самом деле, как хорошо известно производителям, рулевое управление всеми колесами имеет несколько важных потенциальных преимуществ. Каждая система 4ws, которую мы видели до сих пор, поворачивает передние и задние колеса автомобиля в противоположных направлениях в одних условиях и в одном направлении в другое время. Рулевое управление в противоположном направлении заставляет автомобиль поворачивать резче, улучшая его маневренность на малых скоростях и уменьшая радиус поворота. Теоретически рулевое управление в одном направлении улучшает управляемость на высоких скоростях. Чтобы понять почему, представьте, что передние шины автомобиля с традиционным управлением развивают поворачивающую силу сразу же, когда ими управляют, а задние шины развивают поворачивающую силу только тогда, когда кузов автомобиля начинает поворачиваться.В отличие от этого, на автомобиле 4ws все четыре шины развивают свои силы при повороте одновременно. Результат — более отзывчивое управление при переходных маневрах, таких как вход и выход из поворотов. Кроме того, поскольку задние шины автомобиля 4ws не зависят исключительно от угла сноса автомобиля для создания силы поворота, хвост автомобиля не так сильно разворачивается в поворотах и не так сильно виляет при быстрой смене полосы движения. Эти преимущества особенно ярко проявляются на скользких поверхностях, говорят сторонники 4ws.
Дик Келли Автомобиль и водитель
И Honda, и Mazda заявляют об этих преимуществах своих систем 4ws, хотя они придумали совершенно разные средства добавления заднего рулевого управления к своим автомобилям. Система Honda, более простая из двух, полностью механическая. Вал переднего реечного рычага приводит в движение задний рулевой редуктор, который поворачивает задние колеса в том же направлении, что и передние, когда рулевое колесо поворачивается менее чем на 246 градусов по прямой, и в противоположном направлении дальше. точка.Поскольку поворот рулевого колеса более чем на 246 градусов от центра возможен только на очень низких скоростях, режим противодействия обычно используется только при маневрах на парковке. Ни в том, ни в другом режиме задние колеса не поворачиваются слишком сильно. Их максимальный угол поворота в одном направлении составляет 1,5 градуса, а максимальный угол поворота в противоположном направлении — 5,3 градуса.
Система Mazda работает по схожим принципам, но имеет гораздо более сложную конструкцию, в которой используются механические, гидравлические и электронные элементы для точной настройки углов поворота передних и задних колес.С помощью датчиков скорости и блока управления система подстраивает свою работу не под угол поворота рулевого колеса, а под скорость автомобиля. На скорости ниже 22 миль в час задние колеса поворачиваются напротив передних колес до максимального угла в пять градусов. На скорости выше 22 миль в час они поворачиваются в том же направлении, что и передние колеса. Относительные углы поворота и переход от противодействия к рулевому управлению в одном направлении регулируются блоком управления системы. Результирующие характеристики рулевого управления аналогичны характеристикам системы Honda, за одним важным исключением: в то время как рулевое колесо Prelude должно быть значительно намотано до начала противодействия, 626 противодействует поворачиваемости на низких скоростях всякий раз, когда его рулевое колесо перемещается из центра, независимо от того, насколько мал угол поворота. .Таким образом, система Mazda обещает превосходную маневренность на низких скоростях.
Конечно, принципы конструкции двух систем мало что говорят нам о том, как они работают на дороге. Единственное неоспоримое преимущество 4ws — улучшенная маневренность на стоянке. Система Prelude уменьшает радиус поворота с 34,8 до 31,4 футов; соответствующие показатели для 626 составляют 38,0 и 36,1 футов.
Чтобы изучить влияние 4ws на маневры на высоких скоростях, мы заказали образцы Honda Prelude Si и Mazda 626 Turbo с двумя и четырьмя управляемыми колесами и наметили серию тестов управляемости.В дополнение к тестированию на треке в контролируемых условиях испытательного полигона Chrysler в Челси, штат Мичиган, мы проехали на четырех автомобилях по дороге и отметили любые субъективные различия в управляемости. Нашей целью не было прямое сравнение спортивного Prelude и четырехдверного 626. Скорее, мы хотели бы попытаться обнаружить эффекты управления всеми колесами, сравнивая Honda с Honda и Mazda с Mazda. В процессе также станут очевидны относительные достоинства подходов двух производителей к 4ws.
Для нашего тестирования было важно, чтобы версии 2ws и 4ws каждой модели были как можно более похожими. Единственная разница между двумя заказанными нами Preludes заключалась в том, что в одном из них был пакет 4ws, который включает легкосплавные диски, дверные замки с электроприводом и тонированные под бронзу стекла. Обе машины были оснащены одинаковыми пружинами, амортизаторами, стабилизаторами поперечной устойчивости и шинами, хотя Honda указывает полное давление в шинах 28 фунтов на квадратный дюйм для 4ws Prelude и на два фунта меньше для задних шин модели 2ws.
К сожалению, для наших целей Mazda не предлагает 2ws и 4ws 626, которые были бы равны двум Preludes, которые мы заказали.Опция Mazda 4ws доступна только для четырехдверной модели 626 с турбонаддувом и автоматической коробкой передач. Такой же базовый автомобиль доступен с 2ws, но все 2ws 626 Turbos оснащены автоматической регулировкой подвески Mazda. В системе AAS используются трехпозиционные амортизаторы, и ни одна из настроек демпфирования не соответствует фиксированной калибровке, используемой на автомобиле 4ws. Более того, пружины и стабилизаторы поперечной устойчивости, которые поставляются с AAS, мягче, чем оборудование, установленное на автомобиле 4ws. Чтобы максимально компенсировать эти более мягкие компоненты, мы установили систему AAS нашей Mazda 2ws в ее настройку Sport Auto, что дает значительно более жесткое демпфирование, чем амортизаторы автомобиля 4ws.По крайней мере, колеса и шины у двух заказанных нами машин были идентичны.
Наше тестирование было сосредоточено на управляемости при переходных маневрах, поскольку 4ws не должны влиять на движение по прямой или устойчивое движение на поворотах. Наиболее полезными тестами на переходные процессы являются слалом и смена полосы движения. Тест слалома требует как можно быстрее проехать по серпантину через линию равномерно расположенных конусов. При прочих равных лучше всего в этом тесте показали автомобили с хорошим сцеплением с дорогой и стабильной реакцией на рулевое управление.Наш тест на двойную смену полосы движения требует быстрого переключения с одной полосы шириной двенадцать футов на другую, а затем обратно в точках, отмеченных конусами. Хорошая производительность в этом тесте требует управляемости, а также быстрой и точной реакции рулевого управления во время двух крутых резов. Для обоих тестов мы варьировали размеры трасс, чтобы изучить влияние 4ws на разные диапазоны скоростей. И поскольку говорят, что 4ws особенно полезен на скользких поверхностях, мы проводили большинство наших тестов как на сухом, так и на мокром асфальте.
Сухая работа
Дик Келли Автомобиль и водитель
Хотя 4ws теоретически не влияет на управляемость в устойчивом состоянии, мы начали наши испытания с 300-футовой трелевочной платформы Chrysler, чтобы увидеть, как автомобили будут сравниваться по устойчивости на дороге. Хонды были близки с автомобилем 4ws, имеющим преимущество от 0,78 до 0,77 г. Mazdas распространился немного дальше: автомобиль 4ws весил 0,76 г, а модель 2ws — 0,74 г. Учитывая более благоприятное распределение веса 4ws Mazda (за счет оборудования заднего рулевого управления) и ее в целом более жесткую подвеску, ее преимущество на трелевке не было удивительным.
Нашим первым переходным тестом был очень медленный слалом, состоящий из одиннадцати конусов, расположенных на расстоянии всего 25 футов друг от друга. Наше намерение состояло в том, чтобы установить достаточно низкие скорости автомобилей, чтобы выявить эффекты противодействия в моделях 4ws. Со скоростями в диапазоне от 12 до 13 миль в час мы, безусловно, преуспели; однако нам пришлось крутить рули так сильно, что ни одна из четырех систем рулевого управления с гидроусилителем не успевала за ними. В результате этот слалом оказался не более чем проверкой нашей силы верхней части тела.Незначительная разница в скорости между двумя Honda (см. Диаграмму) указывает не более чем на относительные возможности их насосов гидроусилителя рулевого управления.
Honda Prelude Si, 2WS / 4WS
Дорожная защита, трелевочная площадка диаметром 300 футов: 0,77 / 0,78 г
Расстояние между конусами 25 футов: 12,5 / 12,0 миль в час
Расстояние между конусами 50 футов: 31,5 / 31,5 миль в час
Расстояние между конусами 100 футов: 62,0 / 62,0 миль в час
Смена полосы движения, низкая скорость: 30,5 / 34,0 миль в час
Смена полосы движения, высокая скорость: 57,5 / 61,0 миль в час
Когда мы увеличили расстояние между конусами до 50 футов, чтобы изучить эффекты того же -direction 4ws, проблемы с гидроусилителем руля исчезли, и наши испытания начали указывать на управляемость автомобилей.Две «Хонды» развернулись с одинаковой скоростью — 31,5 миль в час. Оба резко повернули и показали хорошую управляемость, хотя машине 4ws требовалось немного больше усилий на рулевое управление.
Две Мазды были гораздо менее похожи. Автомобиль 2ws красиво поворачивал и держал свой хвост хорошо управляемым, преодолевая курс на скорости 32,0 миль в час. Автомобиль 4ws требовал немного меньшего движения рулевого управления, чем его собрат, но он страдал от небольшого двухступенчатого эффекта в реакции рулевого управления при переключении с одного направления на другое. Его скорость по конусам была всего 30.0 миль / ч.
Дик Келли Автомобиль и водитель
С конусами, расположенными на расстоянии 100 футов друг от друга, две Honda больше не казались похожими. Prelude 4ws прекрасно поворачивается и, кажется, обладает потрясающим сцеплением с обоих концов машины. Модель 2ws демонстрировала гораздо больший раскачивание хвоста и требовала значительно большей коррекции рулевого управления. Однако две итоговые строчки были идентичны: оба Preludes преодолели курс на скорости 62,0 миль в час.
Две Mazda поменяли свои позиции в 100-футовом слаломе.Хотя рулевое управление 4ws все еще дергалось, он проехал курс со скоростью 58,0 миль в час, что на 1 милю в час быстрее, чем автомобиль 2ws. Передний руль лучше чувствовал себя за рулем, но более мягкая подвеска ограничивала его скорость.
Подводя итог нашим результатам в сухом слаломе, 4ws Honda оказалась более управляемой, чем ее 2ws коллега, но не быстрее. Две Mazda также были примерно равны по скорости, более линейное рулевое управление 2ws компенсировало более мягкую подвеску.
Mazda 626 Turbo, 2WS / 4WS
Дорожное сопротивление, трелевочная площадка диаметром 300 футов: 0.74 / 0,76 г
Расстояние между конусами 25 футов: 13,0 / 13,0 миль / ч
Расстояние между конусами 50 футов: 32,0 / 30,0 миль / ч
Расстояние между конусами 100 футов: 57,0 / 58,0 миль / ч
Смена полосы движения, низкая скорость: 32,5 / 32,5 миль / ч
Lane смена, высокая скорость: 61,5 / 61,5 миль / ч
В тесте двойной смены полосы движения мы снова начали с нижней границы диапазона скоростей. Наша первая трасса состояла из 25-футового сегмента для первой смены полосы движения, за которым следовала 50-футовая прямая трасса, а затем еще один 25-футовый участок для возврата на исходную полосу движения.
Дик Келли Автомобиль и водитель
Prelude 4ws прошел этот курс значительно быстрее, чем модель 2ws, преодолев от 34,0 до 30,5 миль в час. Однако на пределе эти двое не чувствовали себя очень разными. Автомобиль 4ws требовал большего усилия рулевого управления и чувствовал себя несколько более устойчивым, но оба Prelude демонстрировали постоянную недостаточную поворачиваемость и держали свои хвосты под жестким контролем.
В отличие от этого, две Mazda разворачивались с одинаковой скоростью, 32,5 миль в час, но ощущались заметно отличающимися друг от друга.Автомобиль 2ws устойчиво недостаточно поворачивается и им легко управлять. Автомобиль 4ws также имел недостаточную управляемость, но его рулевое управление было гораздо менее плавным. Его насос гидроусилителя рулевого управления снова не мог справиться с резкими движениями рулевого управления, требуемыми курсом, что привело к значительному скачку усилия рулевого управления, необходимого во время смены полосы движения.
Для более скоростной смены полосы движения мы удвоили длину всех трех сегментов трассы, увеличив длину каждой перекрестной части до 50 футов, а длину прямого участка — до 100 футов.4ws Honda сохранила свое твердое преимущество в этом тесте со скоростью стыковки 61,0 миль в час по сравнению с 57,5 миль в час для версии 2ws. Мало того, что 4ws Honda была быстрее, она также преодолевала дистанцию с гораздо меньшими затратами на рыбу. Виляющий хвост 2ws не особенно сложно было контролировать, но он заставлял нас усерднее работать с рулем.
Дик Келли Автомобиль и водитель
Две Mazda снова повернули с одинаковой скоростью, на этот раз 61,5 миль в час.Однако, как и в случае с Hondas, модель 4ws была более легкой в управлении. Он имел меньшую управляемость, чем 2ws 626, и в целом был более мягким, несмотря на небольшую задержку рулевого управления с усилителем.
Наши результаты смены полосы движения говорят о 4ws лучше, чем наши результаты по слалому, по крайней мере, в случае системы Honda. Prelude 4ws был и быстрее, и более управляемым, чем модель 2ws. Действительно, разница в скорости была настолько большой, что проехать на 4ws Prelude через двойную смену полосы движения на пределе возможностей 2ws было практически без усилий.В отличие от этого, система Mazda 4ws была смешанным благословением. Хотя 4ws 626 чувствовал себя лучше, чем автомобиль 2ws в высокоскоростных переключателях, его отстающая система гидроусилителя рулевого управления затрудняла управление. Что еще более важно, 4ws не улучшил скорость Mazda на трассах.
Мокрая производительность
Дик Келли Автомобиль и водитель
Мы думали, что заявленное преимущество 4ws в стабильности будет более очевидным в наших тестах на мокрой дороге, поскольку на скользком асфальте любое такое преимущество должно быть преувеличено.Поверхность Jennite с низким коэффициентом трения Chrysler, тщательно смоченная спринклерной системой, идеально подходила для наших целей, и мы повторили большинство наших сухих испытаний на ней. Мы не повторили 25-футовый слалом, потому что в этом упражнении были проверены системы рулевого управления с усилителем, а не их управляемость. А поскольку поверхность Chrysler Jennite недостаточно велика для 300-футового троллейбуса, мы провели тест на устойчивость на мокрой дороге на круге, который мы обычно используем, с помощью сильного дождя.
Наши результаты на мокрой трелевке удивили.Рулевое управление четырьмя колесами не должно иметь никакого значения на троллейбусе, поскольку задействован только устойчивый поворот, но оба автомобиля 4ws фактически уступили позиции своим собратьям 2ws при переходе от сухого теста к мокрому. 4ws Honda перешла от преимущества в 0,01 г на сухой дороге к недостатку в 0,03 г на мокрой дороге. Mazda 4ws потеряла преимущество в 0,02 г, связав модель 2ws. У нас нет объяснения этому сдвигу, но он сразу поставил под сомнение предполагаемые преимущества скользкой поверхности 4ws.
Honda Prelude Si, 2WS / 4WS
Roadholding, трелевочная площадка диаметром 300 футов: 0.76 / 0,73 г
Расстояние между конусами 50 футов: 24,0 / 24,0 миль в час
Расстояние между конусами 100 футов: 44,5 / 44,5 миль в час
Смена полосы движения, низкая скорость: 28,0 / 27,0 миль в час
Смена полосы движения, высокая скорость: 49,5 / 47,5 миль в час
Когда мы перешли на трассу слалома с интервалом 50 футов на мокром Jennite, мы снова не обнаружили преимущества для 4ws. Две Honda чувствовали себя очень похожими на трассе и разворачивались с одинаковой скоростью, 24,0 миль в час. Mazda 2ws была на самом деле быстрее, чем модель 4ws, от 24,5 до 23,0 миль в час. И хотя обе Mazdas оказались недостаточно управляемыми, 4ws 626 — больше.Мы также почувствовали, как его хвост немного шевелится по курсу, но без какого-либо заметного влияния на его управляемость.
Дик Келли Автомобиль и водитель
Увеличение расстояния между конусами до 100 футов выявило большие различия между автомобилями. 4ws Honda чувствовала себя в большей безопасности, чем его собрат, держала хвост на одной линии без чрезмерной недостаточной поворачиваемости. Автомобиль 2ws также был на удивление устойчивым, но его хвост с большей вероятностью выскочил, когда был достигнут предел тягового усилия.Однако, несмотря на свои преимущества, 4ws Prelude не смог улучшить скорость автомобиля 2ws до 44,5 миль в час.
Напротив, Mazda 2ws снова значительно превзошла версию 4ws, на 42,5 до 40,5 миль в час. Также было намного лучше. Хвостовая часть машины 4ws была очень рыхлой и угрожающей, и нам было трудно убрать лишнюю скорость, не попав в бок. 2ws 626 тоже не чувствовал себя комфортно с поднятым хвостом, но было гораздо меньше шансов принять такое отношение.
Mazda 626, 2WS / 4WS
Дорожное сопротивление, трелевочная площадка диаметром 300 футов: 0.77 / 0,77 г
Расстояние между конусами 50 футов: 24,5 / 23,0 миль / ч
Расстояние между конусами 100 футов: 42,5 / 40,5 миль / ч
Смена полосы движения, низкая скорость: 27,0 / 25,5 миль / ч
Смена полосы движения, высокая скорость: 46,0 / 46,0 миль / ч
Машины 4ws не улучшили свои позиции на мокрой трассе для смены полосы движения. На малой скорости обе Honda чувствовали себя очень похожими, демонстрируя устойчивую недостаточную поворачиваемость. Но модель 2ws разгонялась до 28,0 миль в час, что на 1,0 миль в час быстрее, чем ее собрат 4ws.
Точно так же Mazda 2ws превзошла автомобиль 4ws, 27,0: 25.5 миль / ч. Автомобиль 2ws прошел курс с немного меньшей недостаточной поворачиваемостью, хотя 4ws 626 чувствовал себя столь же устойчивым в других отношениях.
При скоростной смене полосы движения на мокрой дороге обе Honda чувствовали себя примерно равными, хотя машина 2ws была немного более склонна к раскачиванию хвоста. И снова, однако, он был быстрее, чем 4ws Prelude, разгоняясь со скоростью 49,5 миль в час против 47,5.
Дик Келли Автомобиль и водитель
Mazda 4ws улучшила свои позиции в этом тесте, но только настолько, чтобы сравняться с ее братом 2ws — 46.0 миль / ч. А 2ws 626 чувствовал себя намного лучше, демонстрируя лишь умеренное счастье хвоста. Автомобиль 4ws постоянно вилял хвостом, как бы осторожно он ни управлялся.
Несмотря на теоретические преимущества 4ws на скользком асфальте, оба автомобиля 4ws в этом тесте были медленнее своих 2ws коллег в трех из пяти испытаний на мокрой дороге и не быстрее в остальных. И хотя две Honda были примерно равны по управляемости, 4ws Mazda была явно менее стабильной, чем ее собрат, в большинстве тестов.
Заключение
Дик Келли Автомобиль и водитель
Когда мы задумывали этот тест, мы ожидали, что любые преимущества управляемости 4ws будут наиболее очевидны на мокрой дороге. Вместо этого мы обнаружили прямо противоположное. 4ws Prelude показал себя лучше на сухой дороге и хуже — на мокрой, чем 2ws Prelude, — компромисс не стоит. И хотя наше сравнение двух Mazda несколько испорчено их различными калибровками подвески, 4ws 626 был ничуть не лучше, чем 2ws на сухой дороге, и явно уступал на мокрой дороге.Мы можем только сделать вывод, что в том виде, в каком они разрабатываются в настоящее время, ни Honda, ни Mazda не представляют собой значительного прогресса в технологии рулевого управления.
Эти новые системы рулевого управления тоже не бесплатны. Пакет Honda 4ws добавляет 28 фунтов к снаряженной массе Prelude и 1300 долларов к его цене. Система Mazda 4ws добавляет почти 100 фунтов к 626 и, с поправкой на различия в подвеске двух протестированных автомобилей, стоит около 1385 долларов. Обе системы действительно улучшают маневренность на низких скоростях, что очень ценно, но мы сомневаемся, что многие покупатели потратят столько денег только на то, чтобы облегчить парковку.
Означает ли это, что 4ws, в конце концов, не является значительным достижением в автомобильной инженерии? Единственный разумный ответ — пока рано говорить. Помните, что системы Honda и Mazda — это первые производственные применения того, что, по сути, является совершенно новой технологией. И точно так же, как подходы Honda и Mazda сильно различаются, другие производители наверняка разработают свои собственные уникальные подходы. Из двух представленных до сих пор систем дизайн Honda является более успешным.Он стоит и весит меньше, гораздо менее сложен и дает несколько очевидных преимуществ. Но и она, и система Mazda требуют дальнейшей доработки, если они хотят реализовать свой потенциал. Мы по-прежнему надеемся, что рано или поздно 4ws оправдает свои обещания. Honda и Mazda заслуживают похвалы как первопроходцы, но, по крайней мере, на данный момент, 4ws не является большим шагом вперед.
4ws в дороге
Дик Келли Автомобиль и водитель
Вождение автомобилей на тестовой трассе — лучший способ определить их абсолютные характеристики, но вождение на них в реальном мире не менее важно для тщательной оценки.Когда кто-то изо всех сил пытается избежать хрустящих пилонов, мелькающих назад по обоим бокам, легко упустить из виду тонкости, которые могут иметь решающее значение при повседневном вождении. Чтобы убедиться, что мы ничего не упустили при изучении рулевого управления всеми четырьмя колесами, большинство наших сотрудников проехали все четыре машины в этом тесте по дорогам общего пользования возле наших офисов в Анн-Арборе. Каждый сотрудник ездил на машинах один за другим, поощрялось как нормальное вождение, так и жесткая порка, а некоторые сотрудники ехали и под дождем, и под солнцем. Наша цель, как и при тестировании на треке, заключалась в том, чтобы увидеть, какие различия мы можем обнаружить между автомобилями 4ws и 2ws.
Мы пошли на необычные меры, чтобы каждый водитель-испытатель мог объективно оценить управляемость автомобилей. Сначала мы заклеили идентификационные метки на автомобилях 4ws и соответствующие места на двух других. Во-вторых, поскольку пакет Honda 4ws включает в себя отличительные легкосплавные диски, мы заменили два колеса и шины от Prelude 4ws на комплект от автомобиля 2ws. Наконец, мы попросили наших водителей-испытателей избегать резких маневров на низких скоростях, потому что более крутые повороты полноприводных машин быстро их распознают.Только после того, как водители закончили свои четыре машины и доложили о своих выводах, им разрешили поиграть на нашей стоянке.
Большинству тестировщиков приходилось сильно концентрироваться, чтобы обнаружить хоть какую-то разницу между двумя Хондами. Фактически, один сотрудник, который ошибочно подумал, что знает, какой из Prelude имеет 4ws (машины были окрашены в разные цвета), завершил свои поездки на обеих Honda, не осознавая своей ошибки.
Хотя некоторые водители отметили, что 2ws Prelude демонстрирует большую избыточную поворачиваемость подъемной заслонки, чем автомобиль 4ws, большинство из нас сочло усилие рулевого управления наиболее очевидным различием между ними.У 2ws Prelude восхитительно плавное рулевое управление с очень линейным нарастанием силы при вращении колеса от центра. Автомобиль 4ws управляется почти так же хорошо, но требует немного больше усилий. Он кажется более липким, как будто у него больше механизма для движения — что, конечно, так и есть. Учитывая отсутствие других различий между двумя автомобилями, наши водители единодушно предпочли 2ws Prelude.
Отличить Mazdas друг от друга было намного проще. Каждый сотрудник заметил, что рулевое управление у машины 4ws было намного легче, чем у машины 2ws.В 4ws 626 рулевое колесо смещается от центра почти без сопротивления, и усилие почти не увеличивается при дальнейшем повороте колеса. Напротив, у автомобиля 2ws есть положительная выемка по центру, и его усилие на рулевом колесе сильно возрастает, когда он поворачивает в угол. Разница в усилии рулевого управления между двумя Mazda в пять или десять раз больше, чем у двух Honda.
Две Mazda также сильно отличались от наших тестеров через сиденья их штанов. Автомобиль 4ws меняет направление с такой готовностью, что автомобиль 2ws кажется почти вялым; В повороте на всех четырех колесах сразу чувствуется что-то особенное.Тем не менее, большинство сотрудников расценили такое поведение как нервозность. Вкупе с легким усилием рулевого управления рвение Mazda 4ws к поворотам делало ее слишком нервной на прямой, особенно на высоких скоростях. Никто не нашел автомобиль 4ws нестабильным, но он не двигался с уверенностью, как его конюх 2ws. Даже в поворотах сочетание легкого рулевого управления и резких поворотов не дало большинству наших тестеров почувствовать дорогу. По общему признанию, это впечатление, вероятно, со временем исчезнет.
На нашей стоянке наши тестеры только похвалили за более узкие круги поворота обеих машин 4ws. Хотя улучшения по сравнению с версиями 2ws на бумаге выглядят скромно, они способствуют заметно лучшей маневренности. В автомобиле 4ws с удивительной легкостью можно врезаться в парковочные места и объезжать узкие углы.
Но достаточно ли этого? Улучшенная маневренность на малых скоростях может быть полезной на плотно загруженных дорогах Японии, но вряд ли это необходимо в Америке.В отсутствие других значительных улучшений управляемости все водители-испытатели чувствовали себя разочарованными системами 4ws как Honda, так и Mazda.
Как сказал один из тестировщиков, «рулевое управление с четырьмя колесами поворачивает эту дополнительную пару колес намного сильнее, чем мне в голову». —Csaba Csere
Технические характеристики
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1988 Honda Prelude Si
ТИП АВТОМОБИЛЯ
передний двигатель, передний привод, 5-местное, 2-дверное купе
ЦЕНА ПО ИСПЫТАНИЮ (2WS / 4WS)
16864 долл. США / 18 164 долл. США
ТИП ДВИГАТЕЛЯ
DOHC 2.0-литровый 16-клапанный рядный 4
Мощность
135 л.с. при 6200 об / мин
ТРАНСМИССИЯ
5-ступенчатая МКПП
ШАССИ
Подвеска (передняя / правая): поперечные рычаги / многорычажные
Шины: Michelin MXV, 195 / 60HR-14
РАЗМЕРЫ
Снаряженная масса (2WS / 4WS): 2656 фунтов / 2684 фунта
1988 Mazda 626 Турбо
ТИП АВТОМОБИЛЯ
передний двигатель, передний привод, 5-местный, 4-дверный седан
ЦЕНА ПРИ ИСПЫТАНИИ (2WS / 4WS)
17 867 долл. США / 18 207 долл. США
ТИП ДВИГАТЕЛЯ
с турбонаддувом 2.2-литровый DOHC 16-клапанный рядный 4
Мощность
145 л.с. при 4300 об / мин
ТРАНСМИССИЯ
4-ступенчатая АКПП
ШАССИ
Подвеска (передняя / правая): стойки / стойки
Шины: Yokohama A-341, 195 / 60HR-15
РАЗМЕРЫ
Снаряженная масса (2WS / 4WS): 2946 фунтов / 3038 фунтов
Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты.Вы можете найти больше информации об этом и подобном контенте на сайте piano.io.
Рулевое управление на четыре колеса (4WS) (автомобиль)
27.9.
Рулевое управление всеми четырьмя колесами (4WS) Регулировка углов установки колес между передними и задними колесами играет важную роль в курсовой устойчивости автомобиля. Часто отсутствие устойчивости приводит к опасному вождению. Это отчетливо наблюдается, когда на автомобиле изношены сайлентблоки подвески. Вплоть до середины 1950-х годов большинство автомобилей страдали от чрезмерной поворачиваемости, в основном из-за неконтролируемого движения задней оси, вызванного прогибом пружины, вызванным креном кузова.Проблемы, связанные с характеристикой избыточной поворачиваемости, теперь хорошо изучены. Для повышения устойчивости большинство современных автомобилей имеют характеристики недостаточной управляемости при движении на высоких скоростях.
Одним из этапов получения характеристики недостаточной управляемости является использование крена кузова для поворота задних колес. Это достигается либо смещением задней оси, либо изменением геометрии системы подвески в случае автомобиля, оснащенного независимой задней подвеской. Хотя недостаточная управляемость улучшает устойчивость автомобиля, оно увеличивает усилие водителя на рулевом колесе.Кроме того, поскольку управляемость транспортного средства изменяется в зависимости от скорости движения, реакцию на рулевое управление как по времени, так и по направлению трудно предсказать.
Эти недостатки можно в значительной степени преодолеть с помощью управления четырьмя колесами (4WS). Два производителя автомобилей, Honda и Mazda, в 1988 году представили 4WS на некоторых своих моделях. Сравнение с двумя обычными
Рис. 27.75. Углы поворота колес 4WS (углы показаны преувеличены). Система рулевого управления
, преимущества, предлагаемые системой 4WS, включают:
(i) Превосходная устойчивость на поворотах.
(ii) Повышенная отзывчивость и точность рулевого управления. (Привет) Высокая стабильность на прямой линии.
(iv) Заметное улучшение маневров при быстрой смене полосы движения.
(v) Меньший радиус поворота и маневренность в ограниченном пространстве на низкой скорости. 27.9.1. Относительный угол поворота колес и их контроль
Направление поворота задних колес относительно передних колес зависит от условий эксплуатации. На малых оборотах движение колес выражено, так что задние колеса поворачиваются в направлении, противоположном направлению движения передних колес (рис.27,75). Это также упрощает размещение автомобиля в таких ситуациях, как парковка в ограниченном пространстве. Поскольку задние колеса должны следовать по пути, пройденному передними колесами, задняя часть автомобиля 4WS не поворачивается обычным образом. Таким образом значительно снижается риск столкновения с препятствием.
На высокой скорости, когда рулевое управление незначительно регулируется, передние и задние колеса поворачиваются в одном направлении. В результате автомобиль движется крабоподобным образом, а не по кривой.Это действие выгодно автомобилю при смене полосы движения на высокоскоростной дороге. Устранение центробежного эффекта и, как следствие,
Рис. 27.76. Движение управляемых колес (Honda).
Рис. 27.77. Компоновка Honda 4WS.
Уменьшение крена кузова и силы поворота на шину повышает устойчивость автомобиля, так что управление становится проще и безопаснее.
В системе 4WS наиболее важным является контроль угла поворота передних и задних колес.Системы Honda и Mazda различаются по способу регулирования угла поворота колес. Система Honda использует механическое заднее рулевое управление, а компоновка Mazda включает заднюю коробку передач с усилителем и электронным управлением. Обе системы имеют реечный рулевой механизм с усилителем для переднего рулевого редуктора с разъемом для отбора мощности для управления задним рулевым механизмом через центральный или раздаточный вал. Два или более универсальных шарнира, установленных на валу, допускают небольшие изменения угла привода.
27.9.2.
Система Honda 4WS Эта система зависит от угла поворота, поэтому движение задних колес контролируется угловым перемещением передних колес. Для поворота передних колес примерно до 130 градусов задние колеса расположены так, что они поворачиваются на небольшой угол в том же направлении, что и передние колеса. За пределами этого угла задние колеса постепенно выпрямляются, а затем поворачиваются на сравнительно большой угол в противоположном направлении (рис.27,76).
Планетарный зубчатый механизм, встроенный в задний рулевой редуктор (рис. 27.77), регулирует углы поворота задних колес. Фиксированное кольцевое пространство находится в зацеплении с большой планетарной передачей, которая приводится в движение эксцентриком на входном валу. Короткий вал заодно с планетой и смещен от центра планеты. Этот вал передает привод через ползун и направляющую на штангу хода, соединенную с поперечными штангами задних колес (рис. 27.78A).
Незначительное перемещение входного вала приводит к вращению сателлита, который, в свою очередь, слегка перемещает выходной вал со смещением в том же направлении, что и входной (рис.27.78B). Когда входной вал перемещает смещенный вал в положение ВМТ (рис. 27.78C), шток хода поворачивается обратно в центральное положение, так что задние колеса устанавливаются в прямолинейное положение.
Когда входной вал и планетарная передача вращаются в направлении полной блокировки (рис. 27.78D), шток хода достигает максимального смещения, и, следовательно, происходит соответствующее движение задних колес. Задний редуктор не требует обслуживания и смазан на весь срок службы. Муфты центрального вала имеют шлицы к обоим рулевым редукторам.Главный шлиц в каждой точке соединения обеспечивает правильную сборку агрегатов.
Рис. 27.78. Эпициклическая передача (Honda).
Рис. 27.79. Компоновка Mazda 4WS.
27.9.3.
Задние колеса в этой системе управляются силовым агрегатом с гидравлическим приводом, который управляется электроникой в зависимости от угла поворота рулевого колеса и скорости автомобиля (рис. 27.79). Компоновка Mazda 4WS более сложна, чем компоновка Honda, и, следовательно, включает в себя подходящую отказоустойчивость для безотказной работы.В состав отказобезопасного устройства входят центрирующая пружина блокировки и специальный предохранительный соленоид. В случае отказа гидравлики или электроники эти устройства переводят задние колеса в положение движения по прямой.
Два электронных датчика, установленных на выходе трансмиссии и приводе спидометра, измеряют скорость автомобиля. Сигналы передаются во встроенную память электронного блока управления (ЭБУ), который управляет гидравлической системой для установки направления и угла для задних колес. На скорости менее 35 км / ч задние колеса поворачиваются в направлении, противоположном направлению движения передних колес.При приближении к 35 км / ч задние колеса поворачиваются в положение для движения по прямой. Выше этой скорости задние колеса поворачиваются в том же направлении, что и передние, с углом, ограниченным 5 градусами.
На рисунке 27.80 представлена схема системы и показаны основные компоненты, используемые в этой системе. Функции этих компонентов при управлении задними колесами следующие:
Рис. 27.80. Схема расположения рулевого механизма задних колес (Mazda).
(i) Датчики для измерения скорости автомобиля.
(ii) Блок управления фазой рулевого управления передает гидравлическому регулирующему клапану требуемое направление хода.
(Hi) Электрический шаговый двигатель изменяет угол ярма и фазу конического зубчатого колеса в соответствии с сигналами, полученными от ЭБУ.
(iv) Задний рулевой вал передает положение передних колес конической передаче в блоке управления фазой рулевого управления.
(v) Регулирующий клапан регулирует гидравлическое давление, подаваемое в цилиндр гидроцилиндра.
(vi) Гидравлический цилиндр гидроцилиндра управляет задними колесами в зависимости от требований.
Блок управления фазой рулевого управления (рис. 27.81) изменяет направление и угол наклона задних колес. Электрические импульсы от ЭБУ к шаговому двигателю и движение от рулевого вала к конической передаче изменяют положение гидрораспределителя в соответствии с условиями.
Рис. 27.81. Блок управления фазой рулевого управления.
Демистификация четырехколесного рулевого управления
В течение короткого периода в конце 80-х управление четырьмя колесами казалось следующим большим достижением.К концу 90-х он почти исчез, но за последнее десятилетие 4WS снова появился на моделях Nissan, Renault, BMW, Acura и даже Porsche.
Поскольку 4WS явно возвращается, давайте проясним некоторые заблуждения о его первых днях.
4WS был таким же, как 80-е
Хотя первые серийные автомобильные системы для него не появились до 80-х годов, управление автомобилем с обеих сторон для большей маневренности устарело. Самосвалы с рулевым управлением с задним расположением руля появились раньше, чем сам автомобиль, и инженеры играли с рулевым управлением на четыре колеса для легковых автомобилей еще в 1930-х годах.
Мост Weissach Porsche 928 был важным предшественником 4WS. Большинство серийных автомобилей испытывают некоторые изменения схождения задних колес на поворотах из-за сжатия или отклонения резиновых втулок подвески; это называется подруливанием и может вызвать избыточную поворачиваемость при резких изменениях положения дроссельной заслонки.
Чтобы бороться с этой тенденцией, Porsche расположил втулки задней подвески 928 таким образом, чтобы задние колеса входили внутрь (а не выдвигались) при закрытии дроссельной заслонки. Это пассивное управление задними колесами позже стало обычным явлением — его использовали Citroën, Isuzu, Mazda и другие.
4WS в Honda Prelude 1988 года был полностью механическим; вал передавал угол поворота на планетарную коробку передач, которая затем изменяла схождение или схождение колес через задние рулевые тяги исключительно в зависимости от угла поворота.
Первые автомобили 4WS
Prelude был первым активным автомобилем 4WS, проданным в США, но Nissan R31 Skyline для японского рынка появился раньше, выпущенный в конце 1985 года.
Задний привод Skyline стал первым автомобилем Nissan. поколение High Capacity Active Controlled Suspension system.Как и в случае с осью Porsche Weissach, первоначальная цель HICAS заключалась в смягчении последствий рулевого управления на мощных заднеприводных автомобилях.
Nissan признал ограничение пассивного заднего рулевого управления — его зависимость от нагрузок на поворотах. Они не обязательно строятся достаточно быстро, чтобы обеспечить удобную регулировку носка. Решение Nissan заключалось в использовании гидравлических поршней с компьютерным управлением для выборочного сжатия втулок заднего подрамника Skyline, эффективного поворота задних полу-продольных рычагов на плюс / минус 0,5 градуса для повышения устойчивости при маневрах на высокой скорости.
Ранние системы работали одинаково
На протяжении 80-х японские автопроизводители стремились покрыть поле 4WS патентами, в результате чего было создано несколько различных производственных систем:
Первая система 4WS от Honda, запущенная в апреле 1987 года на Prelude, была целиком и полностью. механический, с помощью вала для соединения передней рулевой рейки с ползуном, приводящим в движение задние рулевые тяги. Планетарный редуктор определяет степень поворота задних колес в зависимости от угла поворота рулевого колеса.При малых углах задние колеса поворачиваются на 1,5 градуса синхронно с передними колесами, но при больших углах (более 246 градусов поворота рулевого колеса) задние колеса поворачиваются на 5,3 градуса напротив передних колес, уменьшая радиус поворота. около 10 процентов.
Mazda 4WS, представленная на Capella / 626 / MX-6 (см. Стр.15), всего через несколько недель после Prelude, была более сложной и тяжелой, использовав задний рулевой вал для передачи угла поворота на гидравлический привод и расчета заднего Углы схождения зависят от угла поворота рулевого колеса и скорости движения.При скорости ниже 22 миль в час задние колеса поворачиваются в противофазе для меньшего радиуса поворота, переключаясь (через электродвигатель) на синхронное рулевое управление на более высоких скоростях.
Система Mitsubishi дебютировала на Galant VR-4 в конце 1987 года. Она работала электрогидравлически на рычагах задней подвески, без механической связи между передними и задними колесами. Задние колеса поворачиваются на 1,5 градуса синхронно с передними на скорости более 31 мили в час.
Nissan HICAS-II и Super HICAS заменили HICAS в 1988–89, а также использовали управляемый компьютером гидравлический привод для перемещения задних нижних поперечных рычагов.Это позволяло изменять схождение на плюс / минус 1 градус в зависимости от скорости и угла поворота. На более высоких скоростях задние колеса сначала поворачиваются в противофазе с передними, чтобы улучшить реакцию на поворот, а затем переключаются на синхронное рулевое управление для большей устойчивости. На малых скоростях заднего рулевого управления не было. Nissan переоборудовал Super HICAS с гидравлического привода на электрический в середине 1993 года.
Toyota Dual-Mode 4WS, впервые представленная на японском рынке Celica в конце 1989 года, была концептуально похожа на Mazda, сочетая в себе рулевой вал, заднюю гидравлику и компьютерные органы управления и обеспечивала синхронизацию по фазе или противофазу задней части. рулевое управление в зависимости от скорости, угла поворота рулевого колеса и скорости поворота рулевого колеса.Система Toyota могла быть заблокирована в режиме 2WS и предлагала нормальный и спортивный режимы 4WS с разной скоростью поворота задних колес.
Honda 4WS второго поколения, представленная на Prelude следующего поколения в сентябре 1991 года, была новой, в ней использовались компьютерные средства управления и электродвигатель, а не рулевой вал и планетарная коробка передач. Эта система, предназначенная для устранения ограничений механической компоновки, была похожа на более поздние системы 4WS, хотя новые системы имеют большую интеграцию с другой электроникой шасси.
В системе Mazda 4WS использовался задний рулевой вал для передачи угла поворота на задний гидравлический привод.
4WS не пользовались популярностью
Это правда, что 4WS получили теплый прием в США и Европе. Эффекты обработки были незаметными, и некоторые рецензенты не могли заметить разницы даже при проведении последовательных тестов. Системы обычно были дорогими, что отпугивало покупателей.
В Японии, однако, рулевое управление на четыре колеса оставалось популярным на протяжении 90-х годов, даже появившись на семейных автомобилях, таких как Accord и Camry, продаваемые на японском рынке.Система 4WS была яркой и высокотехнологичной, привлекательной для некоторых покупателей, а меньший радиус поворота, обеспечиваемый системами Honda, Mazda и Toyota, помогал на узких японских улицах (хотя параллельная парковка требовала некоторой акклиматизации).
Опция в конечном итоге уступила японской рецессии, но 4WS оставалась доступной до 2001 года на Prelude японского рынка и Skyline 2002 года.
Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты.Вы можете найти больше информации об этом и подобном контенте на сайте piano.io.
Honda Global | Система рулевого управления на четыре колеса с датчиком угла поворота (4WS) / 1987
В Шестом исследовательском блоке научно-исследовательского центра Вако Сёичи Сано и Осаму Фурукава глубоко обсуждали, как им следует подойти к концепции, определенной в ходе мозгового штурма.
В конце концов, идея еще не была утверждена в качестве официальной темы проекта, поэтому финансовые и человеческие ресурсы, которыми они располагали, были весьма ограничены.Более того, в то время одновременно работало несколько проектов, что затрудняло поиск подходящей команды разработчиков. Данных тоже было недостаточно, учитывая уникальность такой концепции. Например, хотя они хотели модифицировать существующие модели для создания тестовых автомобилей, они даже не знали, должны ли передние и задние колеса поворачиваться в одном направлении или в противоположных направлениях. Было так много вопросов из-за того, что система рулевого управления на основе четырех колес позволила бы обеспечить значительную гибкость в управлении.Ключевой вопрос был в том, с чего начать.
Сано и Фурукава решили построить теоретическую модель системы рулевого управления с четырьмя колесами, полагая, что это поможет определить фундаментальную концепцию до начала фактических исследований.
«Было интересно просто обдумывать идеи в моей голове просто потому, что это была такая новая система», — вспоминает Фурукава. «Никто никогда раньше не водил машину с такой системой. Мне было весело, просто представляя себя за рулем. Я должен признать, что это было чем-то вроде навязчивой идеи.Я всегда думал о системе 4WS, даже когда не работал ».
Теоретическая модель, созданная на этом этапе, в конечном итоге привела пару к основным механизмам, что дало серьезную мотивацию для разработки системы 4WS.
Рулевое управление на четыре колеса, однако, не было чем-то неизвестным.
Компания Daimler-Benz уже разработала полноприводные автомобили с управляемым колесом для Лесной службы. Их задние колеса были предназначены для поворота в направлении, противоположном передним, чтобы автомобиль мог делать крутые повороты по узким горным дорогам.Однако спецификации еще не были адаптированы для использования в единицах массового производства. Несмотря на то, что он был эффективен при езде в горах, маневренность в других местах была далеко не идеальной. Следовательно, эти автомобили иногда имели проблемы со стабильностью при движении по знаменитому автобану Германии.
Специальный комитет при Министерстве транспорта Японии однажды изучил достоинства транспортного средства, задние колеса которого могут вращаться в направлении, противоположном направлению передних колес, в рамках обсуждения вопросов безопасности больших грузовиков.В то время в обществе росло беспокойство по поводу опасности транспортных средств, особенно в тех случаях, когда требовались широкие левые повороты. Комитет также пришел к выводу, что автомобиль с четырехколесным рулевым управлением будет менее устойчивым на высоких скоростях.
Теоретическая модельФурукавы подтвердила эти опасения, одновременно определив направление дальнейших действий Honda. Основным принципом, определенным его моделью, было то, что передние и задние колеса должны вращаться в одном направлении на высоких скоростях и в противоположных направлениях на низких скоростях.
«Мы использовали цифры, чтобы выразить идеальный автомобиль», — сказал Фурукава. «Это был тот, который мог делать быстрые резкие повороты, для чего мы сделали соответствующие расчеты. И это был ответ, который мы придумали».
Идеальный метод управления четырьмя колесами был исследован с более широкой точки зрения, и эти результаты были затем отражены в конкретной теоретической модели. Этот подход удачно обрисовал в общих чертах систему 4WS, не похожую ни на что до нее. Принципиальный механизм получил базовый патент в 1978 году, что способствовало дальнейшему развитию Honda системы 4WS.
A Mint 1991 Honda Prelude Si 4WS только что продан за 30 000 долларов с прицепом
Honda Prelude никогда не ценилась так, как Integra, del Sol или Civic, но это не значит, что это рыжеволосый пасынок классических компактов Honda. У него все еще есть поклонники, некоторые из которых готовы выделить 30 251 доллар, чтобы получить яркий образец автомобиля.
Эта сумма была выигрышной ставкой на недавнем аукционе Prelude Si 4WS 1991 года, проданном через Bring A Trailer.
Указанный автомобиль был практически свежим с завода экземпляром, его пробег показал скудные 9705 миль. Большая часть этих миль накопилась в Коннектикуте, где жил первоначальный владелец, и была продана дилерским центром в Нью-Йорке. Большинство из них произошло до 1997 года, когда в отчете об истории транспортного средства указано около 7000 миль, с едва ли еще тысячей в течение следующих пяти лет и еще 1700 через 16 лет после этого. Таким образом, почти вся резина автомобиля оригинальна, от заводских шин Michelin до ремней двигателя.
Использование безупречного состояния этого Prelude в качестве единственного оправдания его цены было бы медвежьей услугой по отношению к странности, которой был Prelude. Эта модель относится к последнему году в поколении BA5, которое охватило модели с 1987 по 1991 годы, и могла похвастаться одними из самых концентрированных причуд 1980-х годов в своем ценовом диапазоне. Откидные фары красивы, но их вряд ли стоит упоминать вместе с механической системой рулевого управления на четыре колеса, первой на серийных автомобилях. Эта система поворачивает задние колеса наружу на низких скоростях, чтобы имитировать короткую колесную базу для дополнительной маневренности, и внутрь на высоких скоростях, чтобы имитировать более длинную колесную базу для дополнительной устойчивости.
Prelude Si не был слабаком по стандартам 1987 года с его 2,0-литровым четырехцилиндровым двигателем B20A5 с двумя верхними распредвалами, мощностью около 135 л.с. Однако к 1991 году он уже не был особенно быстрым: на то, чтобы разогнаться до 60 с места, требовалось около девяти секунд, а на четверть мили — более 16 секунд. Хонда никогда не хотела, чтобы Prelude произвел впечатление на светофорезные гонки, поскольку на самом деле в центре внимания модели была уникальная система 4WS, вариант, который, по сообщениям Teknikens Värld , по сообщениям Teknikens Värld , по сообщениям, выбрали для модели в 1987 году более 80 процентов японских покупателей.
Одна из самых замечательных особенностей этого аукциона — то, как мало этот Prelude потерял в цене за 27 лет. Autotrader сообщает, что рекомендованная производителем розничная цена этой спецификации в 1991 году составляла 18 750 долларов США, что с поправкой на инфляцию до уровня 2018 года составляет около 34 800 долларов США. Это означает, что этот автомобиль потерял всего 13 процентов от своей первоначальной стоимости, а с учетом старых шин и ремней теоретически сам автомобиль потерял еще меньше.
Это даже не самый яркий пример того, как старые Honda сохранили (или даже увеличили) свою стоимость с течением времени.Гонщик IndyCar Грэм Рахал в начале этого месяца приобрел S2000 2001 года с пробегом всего 1001 милю за колоссальные 48 000 долларов, а в сентябре оригинальный Integra Type R с пробегом менее 2 000 миль был продан за 63 800 долларов.
Если вы можете найти автомобили для энтузиастов из Японии с малым пробегом, выпущенные до середины 2000-х годов, возможно, стоит их купить. Либо они будут расти в цене, как указано выше, либо у вас будет пуленепробиваемый (и приятный) повседневный водитель на десятилетия вперед.
Повышение управляемости и комфорта автомобиля с помощью 4WS
Автор (ы): Л.Паскали, П. Габриэлли, Дж. Кавьяссо
Филиал: C.R.F. Centro Ricerche FIAT, FIAT Auto, Fiat Auto Осуществимость инноваций
Страницы: 11
Событие: Всемирный конгресс и выставка SAE 2003
ISSN: 0148-7191
e-ISSN: 2688-3627
Также в: Динамика транспортного средства и моделирование, 2003-SP-1778, Последние разработки в области технологий безопасности автомобилей-PT-119, Журнал транзакций SAE 2003 легковых автомобилей — Механические системы-V112-6
Экскаватор-погрузчикPB 130 4WS
БОЛЬШАЯ КАЮТА В КАТЕГОРИИШирокая кабина, самая большая в своей категории, оснащена двумя дверями, системой обогрева, джойстиком сервоуправления фронтальным погрузчиком, механическими органами управления задним экскаватором и дюймовой педалью.Отличный внешний вид спереди и сзади. Сиденье, оборудованное ремнями безопасности, удобное, с подвесками и с тремя положениями регулировки. Отделение для документов находится под сиденьем за спинкой. Руль регулируется.
МИНИ-ПОГРУЗЧИК, МНОГИЕ РЕШЕНИЯ Экскаватор-погрузчик может быть оснащен множеством навесного оборудования, легко заменяемого благодаря стандартному механическому быстрому соединению ковша.Промышленность, строительство, сельское хозяйство, экология — основные возможные области применения. Гидростатическая трансмиссия с насосом высокой производительности позволяет использовать гидравлическое навесное оборудование с идеальным балансом скорости передачи и гидравлической мощности, необходимой благодаря дюймовой педали.
Все конкретные приложения и необходимые настройки оцениваются на предмет возможной осуществимости.
Эта универсальность является результатом универсальности машин Palazzani.
Обычное обслуживание упрощается, поскольку многие точки вмешательства (фильтры, уровни жидкостей) сосредоточены под капотом двигателя и закрываются ключом.Баки для газойля и гидравлического масла находятся на месте кабины вместе со стартерной батареей с предохранителем. Нижняя часть гидростатического насоса также требует минимального обслуживания трансмиссии с переключением под нагрузкой.
КОМПАКТНЫЕ РАЗМЕРЫ, ВЫСОКИЕ ХАРАКТЕРИСТИКИКомпактный и быстрый, он перемещается в небольших помещениях и отлично подходит для обслуживания небольших зданий, сельского хозяйства, садоводства или промышленного использования. Шасси жесткое, с качающейся передней осью и тремя типами рулевого управления (4WS, 2 передних управляемых колеса и крабовое рулевое управление).Уникальная в своей категории машина оснащена осями, что делает ее настоящим экскаватором-погрузчиком с превосходной маневренностью и низким расходом шин. Дизельный двигатель расположен спереди, в продольном положении, с насосами спереди и радиатором сзади для лучшего обслуживания, обзора и рабочего баланса с экскаватором с обратной лопатой. Передний рычаг с параллелограммным механизмом позволяет использовать как ковш, так и вилы.