Тема 11. Обгон, опережение, встречный разъезд — Учебник
Обгон является одним из самых опасных маневров на дороге. При неправильном его выполнении происходят самые тяжелые ДТП.
Дело в том, что обгон – это опережение одного или нескольких транспортных средств с выездом на полосу встречного движения и последующим возвращением на ранее занимаемую полосу.
А при встречном столкновении, как следует из законов физики, скорости складываются. Так что для безопасности маневра при выполнении обгона водителю необходимо учитывать множество факторов.
Прежде, чем начать обгон, водитель обязан убедиться в том, что полоса движения, на которую он собирается выехать, свободна на достаточном для обгона расстоянии.
Не помешает также оценить глубину выбоин на «встречке», иначе не только колеса можно там оставить, но и создать опасность для движения другим участникам дорожного движения, что вообще-то ПДД запрещено.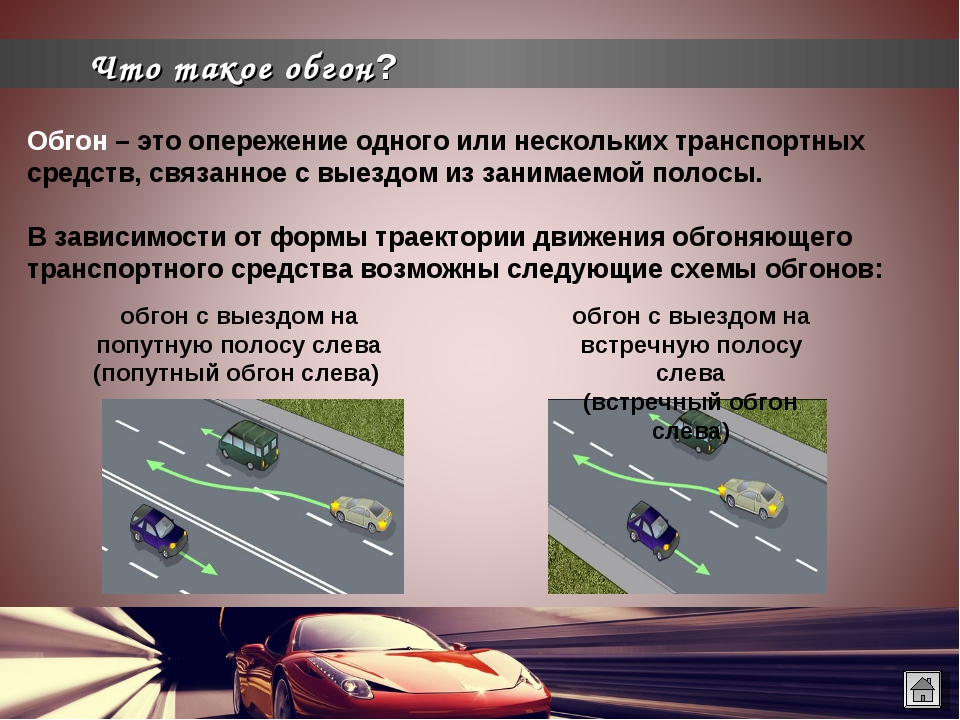
Если транспортное средство, движущее впереди, включило поворотник налево и само приступило к обгону или объезду препятствия, то на обгон идти нельзя. Думаем, не нужно объяснять почему.
Аналогичная история и с позади едущим автомобилем, решившим преступить к обгону.
Кроме того, важно убедиться, что после завершения обгона водитель сможет без ДТП вернуться на ранее занимаемую полосу. То есть там должно быть свободное место, иначе кто вас впустит обратно?
Кстати, по Правилам водителю обгоняемого автомобиля запрещено препятствовать обгону: ускоряться или подрезать.
Также необходимо учитывать погодные и дорожные условия. Ведь решение обогнать ночью в ливень может стать роковой ошибкой водителя.
А теперь перейдем к самому главному: где такой опасный маневр, как обгон
, запрещен.
Начнем с разметки. Мало кому в голову придет, что пересекать сплошную линию можно безнаказанно. А уж тем более двойную сплошную.
А уж тем более двойную сплошную.
Естественно, обгон через сплошную запрещен.
Но даже, если линия посреди дороги прерывистая, стоит обратить внимание на наличие знаков. Есть один, который так и называется «Обгон запрещен» .
Однако в некоторых случаях обгонять можно и в зоне действия этого знака. Нет-нет, речь не идет о машинах в другой цветовой гамме, нежели на знаке.
Обгонять можно двухколесные мотоциклы, гужевые повозки и мопеды.
А также любые тихоходные транспортные средства, которые по своим техническим характеристикам не могут ехать быстрее 30 км/ч. При этом на таком транспортном средстве должен быть установлен специфичный треугольный знак, как на картинке слева.
При этом если раньше обгон тихоходов был разрешен даже через сплошную линию разметки, то в 2017 году Верховный суд «прикрыл» эту «лазейку». Так что теперь обгон тихохода через сплошную – это практически 100-процентное лишение прав.
Обгон запрещен почти на всех перекрестках.
Во-первых, на регулируемых. Зато опережение без выезда на «встречку» — это пожалуйста!
Во-вторых, обгон запрещен на нерегулируемых, когда автомобиль движется по второстепенной дороге.
То есть, чтобы совершить обгон на перекрестке, нужно убедится, что на нем отсутствует светофор или регулировщик, а также, что вы едете по главной дороге.
А что делать в этой неоднозначной ситуации из экзаменационных задач?
Разрешено ли Вам выполнить обгон в данной ситуации?
1. Разрешено.
2. Разрешено, если обгон будет завершен до перекрестка.
3. Запрещено.
На данном рисунке мы видим знак, обозначающий, что впереди нерегулируемый перекресток равнозначных дорог. И обгон на нем делать нельзя (помните же, что обгон допускается ТОЛЬКО при движении по главной дороге). Но предупреждающий знак устанавливается вне населенного пункта за 150-300 м до перекрестка. Так что в данной ситуации можно обогнать, но завершить маневр нужно до границы пересечения дорог. Правильный ответ – 2.
Но предупреждающий знак устанавливается вне населенного пункта за 150-300 м до перекрестка. Так что в данной ситуации можно обогнать, но завершить маневр нужно до границы пересечения дорог. Правильный ответ – 2.
На пешеходном переходе тоже нельзя обгонять. Оно и понятно: и без того опасное местечко.
Ранее было правило, что обгон запрещен на пешеходных переходах при наличии на них пешеходов. Сейчас же все стало более категорично, и обгон на таких участках запрещен во всех случаях.
На железнодорожных переездах и ближе чем за 100 м перед ними также не разрешается выполнять обгон.
Опасен этот маневр и на мостах, путепроводах, эстакадах и под ними, а также в тоннелях. Так что обгонять в данных местах также запрещено.
Кроме того, обгонять не разрешается также в конце подъемов, на опасных поворотах и на других участках с ограниченной видимостью.
Стоит отметить, что обгон на подъеме не запрещен. Если транспортное средство приемистое, а видимость позволяет, то водитель вполне может начать маневр. Однако при подходе к вершине подъема обгонять нельзя – иначе лобового столкновения не избежать. И тут уже «выживет» крупнейший.
Если транспортное средство приемистое, а видимость позволяет, то водитель вполне может начать маневр. Однако при подходе к вершине подъема обгонять нельзя – иначе лобового столкновения не избежать. И тут уже «выживет» крупнейший.
От обгона перейдем к опережению.
Согласно ПДД, опережение – это движение транспортного средства со скоростью, большей скорости попутного транспортного средства. То есть получается, что обгон – это частный случай общего понятия «опережение» только с выездом на полосу встречного движения.
Правила довольно лояльны к этому маневру. Если дорога свободна, то опережать разрешено. Только перед пешеходным переходом будьте осторожны: если другие водители притормозили, вам нужно последовать их примеру, а уж никак не опережать.
В условиях интенсивного движения, когда все полосы данного направления плотно забиты транспортными средствами, ПДД категорично запрещают опережение. Тут и без ваших маневров опасности предостаточно.
На любой дороге может встретиться препятствие, которое не позволит объехать его по своей половине дороги. И тогда придется познакомиться с таким понятием, как
И тут действует вполне логичное правило: чья половина дороги занята, тот и уступает.
Если водитель встретил препятствие, он включает сигнал поворота, который говорит о намерении перестроиться. И ждет, когда встречный поток проедет.
А вот на спуске-подъеме ситуация с точностью до наоборот. И это правило мы уже рассматривали, когда проходили предупреждающие знаки и .
При затрудненном разъезде на спуске-подъеме уступает водитель, который идет на спуск. Ведь спускающемуся автомобилю намного проще притормозить, пропустив другого, а затем просто убрать ногу с педали тормоза и продолжить спуск.
Напротив, груженая фура, двигающаяся в гору, может начать скатываться вниз во время начала движения после остановки на уклоне.
| |
| |
| |
| |
| |
| |
| |
| |
| |
| |
|



 Наличие на второстепенной дороге непосредственно перед перекрестком участка с покрытием не делает ее равной по значению с пересекаемой.
Наличие на второстепенной дороге непосредственно перед перекрестком участка с покрытием не делает ее равной по значению с пересекаемой. 2.1, разделяющий смежные проезжие части и не предназначенный для движения и остановки транспортных средств.
2.1, разделяющий смежные проезжие части и не предназначенный для движения и остановки транспортных средств. 4.1.
4.1.ПДД РФ 2021 — 11. Обгон, встречный разъезд
11.1. Прежде чем начать обгон, водитель обязан убедиться в том, что полоса движения, на которую он собирается выехать, свободна на достаточном для обгона расстоянии и в процессе обгона он не создаст опасности для движения и помех другим участникам дорожного движения.
11.2. Водителю запрещается выполнять обгон в случаях, если:
- транспортное средство, движущееся впереди, производит обгон или объезд препятствия;
- транспортное средство, движущееся впереди по той же полосе, подало сигнал поворота налево;
- следующее за ним транспортное средство начало обгон;
- по завершении обгона он не сможет, не создавая опасности для движения и помех обгоняемому транспортному средству, вернуться на ранее занимаемую полосу.
11.3. Водителю обгоняемого транспортного средства запрещается препятствовать обгону посредством повышения скорости движения или иными действиями.
11.4. Обгон запрещен:
- на регулируемых перекрестках, а также на нерегулируемых перекрестках при движении по дороге, не являющейся главной;
- на пешеходных переходах;
- на железнодорожных переездах и ближе чем за 100 метров перед ними;
- на мостах, путепроводах, эстакадах и под ними, а также в тоннелях;
- в конце подъема, на опасных поворотах и на других участках с ограниченной видимостью.
11.5. Опережение транспортных средств при проезде пешеходных переходов осуществляется с учетом требований пункта 14.2 Правил.
11.6. В случае если вне населенных пунктов обгон или опережение тихоходного транспортного средства, транспортного средства, перевозящего крупногабаритный груз, или транспортного средства, двигающегося со скоростью, не превышающей 30 км/ч, затруднены, водитель такого транспортного средства должен принять как можно правее, а при необходимости остановиться, чтобы пропустить следующие за ним транспортные средства.
11.7. В случае если встречный разъезд затруднен, водитель, на стороне которого имеется препятствие, должен уступить дорогу. Уступить дорогу при наличии препятствия на уклонах, обозначенных знаками 1.13 и 1.14, должен водитель транспортного средства, движущегося на спуск.
Правила дорожного движения. Обгон.
14.1Осуществлять обгон нерельсовых транспортных средств разрешается только слева.
* (Примечание: пункт 14.1 удален из Правил дорожного движения постановлением КМ №111 от 11.02.2013)
14.2Перед началом обгона водитель должен убедиться в том, что:
a) | ни один из водителей транспортных средств, которые движутся за ним и которым может быть создано препятствие, не начал обгона; Если водитель серого автомобиля намерен выполнить обгон, он должен сначала посмотреть в зеркала заднего вида. Поскольку водитель зеленого автомобиля уже начал обгон, водитель серого автомобиля должен дождаться пока зеленый автомобиль закончит выполнение обгона и не создавать ему в этом препятствий. |
б) | водитель транспортного средства, которое двигается впереди по той самой полосе, не подал сигнал о намерении поворота (перестраивание) налево; Поскольку водитель зеленого автомобиля включил указатель левого поворота, водителю красного автомобиля запрещается начинать обгон в этой ситуации. |
в) | полоса встречного движения, на которую он будет выезжать, свободна от транспортных средств на достаточном для обгона расстоянии; В следующей ситуации водитель черного автомобиля должен воздержаться от обгона, поскольку расстояние до встречного автомобиля недостаточно для безопасного выполнения этого маневра. |
г) | после обгона сможет, не создавая препятствий обгоняемому им транспортному средству, вернуться на занимаемую полосу. Полоса встречного движения хорошо просматривается и является свободной на достаточном для обгона расстоянии. При возвращении на полосу попутного движения водитель черного автомобиля должен посмотреть в зеркала заднего вида и убедиться в том, что синий автомобиль находится на достаточном расстоянии позади, чтобы при возвращении на правую полосу движения ему не создать аварийную ситуацию. |
Водителю обгоняемого транспортного средства запрещается препятствовать обгону путем повышения скорости движения или иными действиями.
Водители черного и желтого автомобилей не должны увеличивать скорость или маневрировать, поскольку это будет препятствовать водителю белого автомобиля завершить обгон. 14.4Если на дороге за пределами населенного пункта дорожная обстановка не позволяет осуществить обгон сельскохозяйственной техники, ширина которой превышает 2,6 м, тихоходного или крупно-габаритного транспортного средства, его водитель должен двигаться как можно правее, а при необходимости — остановиться на обочине и пропустить транспортные средства, движущиеся за ним.
14.5Водитель транспортного средства, выполняющий обгон, может остаться на полосе встречного движения, если после возвращении на ранее занимаемую полосу ему придется снова начать обгон, при условии, что он не создаст опасности встречным транспортным средствам, а также не будет препятствовать транспортным средствам, движущимся за ним с более высокой скоростью.
14.6Обгон запрещен:
a) | на перекрестке; Водителю автомобиля запрещается выполнить обгон мотоцикла на перекрестке. |
б) | на железнодорожных переездах и ближе чем за 100 м перед ними; Водитель белого автомобиля находится ближе чем за 100 м. до железнодорожного переезда, поэтому выполнить обгон ему запрещается.Выполнить обгон после проезда железнодорожного переезда не запрещается. |
в) | ближе чем за 50 м перед пешеходным переходом в населенном пункте и 100 м — вне населенного пункта; Водителю белого BMW запрещается выполнить обгон, поскольку до пешеходного перехода осталось 50 метров, а обгон должен быть завершен не менее чем за 50 метров в населенном пункте.В следующей ситуации водителю белого BMW, также запрещается выполнить обгон, поскольку до пешеходного перехода, расположенного вне населенного пункта осталось менее 100 метров. |
г) | в конце подъема, на мостах, эстакадах, путепроводах, крутых поворотах и других участках дорог с ограниченным обзором или в условиях недостаточной видимости; Водителю синего автомобиля запрещается выполнить обгон белого автомобиля, поскольку видимость в конце подъема ограничена и он не видит свободна ли полоса встречного движения на достаточном для безопасного обгона расстоянии.Поскольку транспортные средства движутся по мосту, выполнить обгон запрещается. Водителю черного автомобиля запрещается выполнить обгон на этом участке дороги, поскольку в зоне крутого поворота обзорность дороги ограничена и он не видит свободна ли полоса встречного движения на достаточном для обгона расстоянии. |
ґ) | транспортного средства, которое осуществляет обгон или объезд; Водитель зеленого автомобиля не должен пытаться выполнить обгон белого автомобиля, который осуществляет обгон трактора. |
д) | в тоннелях; Поскольку транспортные средства движутся в тоннеле, водителю белого автомобиля запрещается выполнить обгон грузовика. |
е) | на дорогах, которые имеют две и более полосы для движения в одном направлении; Поскольку данная дорога имеет две полосы для движения в одном направлении, водителю желтого автомобиля запрещается выполнить обгон красного автомобиля. |
є) | колонны транспортных средств, позади которой движется транспортное средство с включенным проблесковым маяком (кроме оранжевого). Выполняя обгон колонны транспортных средств, которую замыкает автомобиль с включенными проблесковыми маячками синего и зеленого цвета, водитель белого автомобиля нарушает Правила.Выполнить обгон грузового и сопровождающего его автомобиля с включенными проблесковыми маячками оранжевого цвета не запрещается. При этом, водитель желтого автомобиля должен убедиться в том, что полоса встречного движения свободна на достаточном для обгона расстоянии. |
Почему в наших ПДД невозможно разобраться — мнение эксперта («За рулем.РФ»)
«Когда множатся законы и приказы, растет число воров и разбойников».
Лao-цзы
Почему наши ПДД постоянно переписывают и дополняют? Да порой так, что даже опытный водитель невольно начинает сомневаться, правильно ли он вообще ведет машину.
Примеров — море. Возьмем, скажем, понятие «обгон», которое на моей памяти постоянно меняется. Так называют то опережение с выездом на встречку, то любое опережение с выездом из занимаемой полосы. Откуда такие скачки сознания?
А перекрестки с круговым движением? Это вообще атака темных сил на сознание. Действует на них правило правой руки или нет? Всегда ли главнее тот, кто на круге?
А обгон тихоходных ТС? Когда-то всё было просто — обгоняй на здоровье, если скорость тихохода 30 и менее. Затем добавили миллион уточнений: скажем, гужевые повозки и мотоциклы обгонять можно, а велики и вьючных животных — нет… Потом одумались и вписали-таки велосипеды. Потому что глупо получается, когда мотоцикл обогнать можно, а велосипед нельзя.
Но это еще не все! Реально ли сегодня обогнать в зоне действия знака «Обгон запрещен» плетущийся перед тобой трактор или поврежденный автомобиль? Нет, без шансов. Правда, толкование знака 3.20 «Обгон запрещен» поясняет, что тихоходов обгонять можно, но в п.1 («Общие положения») понятия тихохода вообще нет!
Зато в «Основных положениях по допуску ТС к эксплуатации…» неожиданно появляется специальный знак «Тихоходное транспортное средство» — красный треугольник с желтой или красной полосой… Стало быть, тихоходом сегодня является только обладатель такого треугольника! Если к трактору прицепили такую табличку — обгоняй. Только убедись, что в этом месте действует знак 3.20 «Обгон запрещен». Если же знака нет, а обгон запрещает сплошная линия разметки, тогда обгонять нельзя. Ведь в определении сплошной линии разметки исключения для обгона тихохода нет: нарвешься по полной…
Старый опытный преподаватель автошколы (такие еще остались!), возмущенный бесполезным многословием нынешних ПДД, поделился со мной цитатой из Инструкции городовым московской полиции 1883 года издания. Там было сказано: «Не запрещается объезжать умеренной рысью тихо едущих». Коротко и ясно…
А что такое термин «Жилая зона»? Тот, кто захочет разобраться, вскоре поймет: чушь какая-то. Потому что в «Общих положениях» ПДД такого термина… тоже нет! И лишь в п.17.1. поясняется, что составители Правил имели в виду территорию, въезды и выезды на которую обозначены довольно редкими у нас знаками 5.21 и 5.22. Но упомянутые знаки, по сути, никому не нужны, потому что чуть ниже, в п. 17.4. того же раздела, сказано»: «Требования данного раздела распространяются также и на дворовые территории». Короче говоря, приехали: жилая зона и двор — одно и то же. Так зачем забивать водителю голову новыми терминами?
Из свежих новых терминов вспомним так называемую «вафлю». Это такое место, на котором нельзя застревать, а то накажут! Да кто же застревает по своей воле? А понятие затора существовало всегда — ПДД раньше запрещали въезжать на перекрестки, если там и без тебя совсем тесно.
Венец словоблудия — так называемое «Опасное вождение», которое отныне запрещено. Но разве оно было когда-то разрешено? Во всех редакциях ПДД всегда запрещались несоблюдение безопасной дистанции, препятствование обгону, перестроение при интенсивном движении, излишне резкие торможения и пр. Но кому-то показалось, что в ПДД слишком мало буковок — надо бы дополнить.
Тот же старый преподаватель обратил мое внимание на термин «Парковка (парковочное место)…». В определении — аж 83 слова. Запомнит ли такое ученик автошколы или водитель? Почему не написать, что парковка, мол — это место для стоянки ТС? Но еще мудренее определение велосипеда — в нем упомянут даже «электродвигатель номинальной максимальной мощностью в режиме длительной нагрузки, не превышающей 0,25 кВт, автоматически отключающийся на скорости более 25 км/ч.» Не верите — откройте ПДД.
Между тем новые редакции ПДД продолжают появляться постоянно. Уточнения, дополнения, изменения… Документ, который обязан заботиться о безопасности на дорогах, сам мечется подобно пешеходу, перебегающему широкую улицу.
А по улице несутся автомобили, управляемые водителями, искренно не понимающими, чего от них хочет закон. Который должен быть не хамелеоном, постоянно меняющим окраску, а своего рода подобием Конституции, то есть основным Законом, не опускающимся до словоблудия.
Только тогда можно требовать от водителей его соблюдения.
Михаил Колодочкин, «За рулем.РФ»
ОБГОН ИЛИ ОПЕРЕЖЕНИЕ — ТОНКАЯ ГРАНЬ
Правила выполнения обгона — не самая частая причина конфликтов между водителем и инспектором. Но назвать такие ситуации редкими тоже было бы ошибкой. Поэтому им стоит уделить внимание.
Следует помнить, что действующая редакция ПДД дает исчерпывающее определение обгона (п.2.31): обгон — это опережение одного или нескольких движущихся транспортных средств, связанное с выездом на встречную полосу движения (сторону проезжей части дороги). То есть если выезд на полосу встречного движения не осуществляется — это не обгон, а просто опережение. И правила обгона при этом не действуют.
Одна из возможных причин конфликта с сотрудником ГАИ при обгонах — создание обгоняющим помех транспортному средству, движущемуся сзади и тоже начавшему обгон или обгоняемому при возвращении на свою полосу. В соответствии с ПДД водитель, начиная обгон, должен убедиться, что препятствий для движения таких транспортных средств создано не будет:
«92. До начала обгона водитель должен убедиться в том, что полоса движения, на которую он намерен выехать, свободна и своими действиями он не создаст угрозу безопасности дорожного движения, не заставит участников дорожного движения изменить направление и (или) снизить скорость движения.
93. Водителю запрещается выполнять обгон:
93.1. если водитель транспортного средства, движущегося впереди по той же полосе движения, подал сигнал левого поворота;
93.2. если следующие за ним водители начали обгон».
Метод защиты здесь такой же, как и при обвинении в создании препятствий или опасности на перекрестках или пешеходных переходах. Заключается он в том, чтобы настаивать на предъявлении доказательства того факта, что препятствие для чьего-то движения действительно было создано. Во-первых, что такой участник движения вообще был. Во-вторых, что он действительно предпринимал торможение или маневрирование. В-третьих, что именно действия, предпринятые обгоняющим, вынудили другого водителя тормозить или маневрировать.
Доказать это без пояснений «пострадавшего» водителя, по сути, невозможно. А он, пока идет дискуссия с инспектором, как правило, продолжает свой путь… Если его сразу не остановили и не взяли у него объяснений, то в собственном объяснении при составлении протокола нужно указать, что в связи с этим каких-либо доказательств нарушения нет, а потом заявить ходатайство о прекращении дела за отсутствием состава административного правонарушения.
Вторая причина возможных конфликтов — это обгон в местах, где он запрещен:
«96. Обгон запрещается:
96.1. в зоне действия дорожных знаков «Обгон запрещен», «Обгон грузовым автомобилям запрещен», на поворотах дороги, обозначенных дорожными знаками «Опасный поворот», «Опасные повороты», на подъемах, обозначенных дорожным знаком «Крутой подъем», а также в конце подъемов и на других участках дорог с ограниченной обзорностью дороги;
96.2. на обозначенных и регулируемых перекрестках;
96.3. на пешеходных переходах и ближе чем за 50 метров перед ними;
96.4. транспортного средства, производящего обгон или объезд препятствия;
96.5. при недостаточной видимости дороги;
96.6. на мостах, путепроводах, эстакадах и под ними;
96.7. на железнодорожных переездах и ближе чем за 100 метров перед ними».
Здесь нужно помнить следующее. Во-первых, перечень мест, где запрещен обгон, является исключительным. То есть говорить о запрете обгона в каких-либо иных местах сотрудник ГАИ не имеет права.
И еще. У нас есть много дорог, особенно загородных, не снабженных никакой разметкой. Согласно п.75 ПДД в таких случаях количество полос для движения определяется самими водителями с учетом ширины проезжей части дороги, габаритов транспортных средств и необходимых боковых интервалов между ними.
Поэтому, если дорога имеет достаточную ширину (хотя бы более 10 м), водитель может «определить» для себя, что для движения в данном направлении имеется две полосы. И соответственно утверждать, что им совершалось (например, в зоне перекрестка) опережение без выезда на встречную полосу, а не обгон. Дело в том, что инспектору, чтобы остановить обгонявшего, нужно находиться хотя бы в нескольких десятках метров от места обгона (останавливать обгонявшего можно, когда он уже вернулся на свою полосу, ведь во время обгона, скажем, грузового автомобиля обгоняющий просто будет заслонен им от инспектора, стоящего на обочине). С такого расстояния точно определить, выехал ли обгоняющий автомобиль на полосу встречного движения, не всегда возможно. Причиной этого является угол, под которым инспектор в подобной ситуации обозревает место обгона с обочины, — вся «картинка» при этом искажается. И главное — такое наблюдение инспектора, когда осевая линия воображаемая, не может являться ничем иным, кроме его личного предположения (если, конечно, обгоняющий не подъехал прямо к левой обочине). На этом и следует настаивать в своих объяснениях: выезда на встречную полосу не было, а было опережение на дороге, имеющей по две полосы в каждом направлении.
При рассмотрении дела имеет смысл заявить ходатайство о посылке запроса в соответствующую дорожную службу: какова ширина проезжей части в месте «нарушения»?
Далее свою правоту можно доказывать так.
Предположим, ширина проезжей части — 11 м, а ширина обгоняемого транспортного средства — около 2 м, обгоняющего — 1,65 м. Согласно п.75 ПДД водитель сам определяет в зависимости от ряда условий безопасный интервал. Поэтому при рассмотрении дела можно дать такие пояснения: «Я полагал, что безопасный интервал от обочины до правого края обгоняемого транспортного средства составляет 0,5 м, между обгоняемым и обгоняющим — чуть менее 1 м, между левым краем обгоняющего транспортного средства и воображаемой осевой — 0,5 м. При ширине проезжей части 11 м часть дороги, предназначенная для движения в данном направлении, шириной 5,5 м имеет две полосы движения. Исходя из этого, я совершил опережение со скоростью, превышающей скорость попутно движущегося транспортного средства, без выезда на полосу встречного движения, которое в соответствии с п.2.31 ПДД не является обгоном. Поэтому считаю, что правил обгона не нарушал. На этом основании прошу прекратить дело за отсутствием состава административного правонарушения». То же самое можно указать и в письменном ходатайстве о прекращении дела.
При отсутствии в материалах дела пояснений водителя обгоняемого транспортного средства, согласно которым обгоняющий явно выехал на полосу встречного движения (а их практически никогда не бывает), эти выкладки опровергнуть просто нечем. А раз так, то и признать водителя виновным в нарушении правил обгона невозможно.
Нужно помнить, что ответственность за безопасность обгона так или иначе лежит на том, кто его совершает. Все приведенные оправдания могут быть действенны только в тех случаях, когда ДТП в результате обгона не произошло. Если оно имело место, то картину произошедшего будут, скорее всего, восстанавливать эксперты…
Только оправдываться, возможно, будет уже некому.
Поэтому все описанные выше способы защиты, которые могут помочь в спорных ситуациях, не должны становиться основанием для того, чтобы решаться на рискованный и неоправданный обгон в надежде выиграть какую-то минуту…
Александр СТАРИЧЕНКО.
Интеллектуальная автоматическая система обгона с использованием системы видения для обнаружения транспортных средств
https://doi.org/10.1016/j.eswa.2011.09.024Получение прав и контентаАннотация
Имеются явные доказательства того, что инвестиции в технологии интеллектуальных транспортных систем приносят значительные социальные и социальные выгоды. экономические выгоды. В частности, технологические достижения в области автоматических систем становятся жизненно важными для снижения смертности на дорогах. Здесь мы описываем наш подход к автоматизации одного из самых рискованных автономных маневров с участием транспортных средств — обгона.Подход основан на системе стереозрения, отвечающей за обнаружение любого предшествующего автомобиля и запуск автономного маневра обгона. С этой целью был разработан контроллер на основе нечеткой логики, имитирующий, как люди обгоняют. На его вход поступает информация от системы технического зрения и от системы на основе позиционирования, состоящей из дифференциальной системы глобального позиционирования (DGPS) и инерциального измерительного блока (IMU). Его результат — это воздействие на исполнительные механизмы транспортного средства, то есть на рулевое колесо, педали газа и тормоза.Эта система была встроена в коммерческий автомобиль Citroën и протестирована на частной трассе в нашем исследовательском центре CAR, на различных предшествующих транспортных средствах — мотоцикле, легковой машине и грузовике — с обнадеживающими результатами.
Особенности
► Мы внедрили автономную систему обгона в коммерческий автомобиль. ► Система выполняет маневр как человек, т. Е. В зависимости от ведущей машины. ► Система обзора используется для обнаружения препятствий и определения их длины и ширины.► Нечеткая логика использовалась в качестве метода управления для разработки поперечного и продольного управления. ► Реальные эксперименты показывают способность системы управлять любым маневром обгона.
Ключевые слова
Усовершенствованные системы контроля и безопасности транспортных средств
Контроль дорожных транспортных средств
Стереовидение
Нечеткая логика
Интеллектуальные транспортные системы
Рекомендуемые статьиЦитирующие статьи (0)
Полный текстCopyright © 2011 Elsevier Ltd. Все права зарезервированный.
Рекомендуемые статьи
Цитирование статей
(PDF) Надежное обнаружение обгоняемых транспортных средств с использованием надежной информации Fusion
ОПЕРАЦИИ IEEE НА ИНТЕЛЛЕКТУАЛЬНЫХ ТРАНСПОРТНЫХ СИСТЕМАХ, ТОМ. ХХХ, НЕТ. XXX, XXX 2006 11
ТАБЛИЦА I
P
ДЕЙСТВИЕ ПРЕДЛАГАЕМОГО МЕТОДА ОБНАРУЖЕНИЯ.
скорость основного транспортного средства известна скорость основного транспортного средства неизвестна всего
количество последовательностей 56 10 66
количество кадров 51185 13412 64597
длительность 40 мин 29.40 с 8 мин 56,48 с 49 мин 25,88 с
количество обгоняющих транспортных средств 53 147 200
правильное обнаружение 53 145 198
промахов 0 2 2
ложных тревог 0 8 8
Методбыл оценен на обширном наборе данных, охватывающем
широкий спектр условий движения. Достигнута превосходная производительность
, что демонстрирует надежность и устойчивость
этих новых методов. Благодаря этой работе было получено
ценных идей.Устойчивость алгоритма Vision
к различным условиям окружающей среды имеет решающее значение
для автомобильных приложений, а статистические методы предоставляют
мощных инструментов для анализа данных с шумом и выбросами.
Кроме того, пространственные и временные свойства транспортных средств и сцены движения
обеспечивают полезные ограничения для принятия надежных решений
.
R
EFERENCES
[1] П. Анандан, «Вычислительная среда и алгоритм для
измерения структуры по движению», Международный журнал
Computer Vision, 2 (3): 283-310, 1989 г.
[2] С. Бейкер и И. Мэтьюз, «Лукас-Канада 20 лет спустя: объединяющая структура
», Международный журнал компьютерного зрения, 56 (3): 221-255,
2004.
[ 3] JL Barron, DJ Fleet и SS Beauchemin, «Performance of Optical
Flow Techniques», International Journal of Computer Vision, 12 (1): 43-
77, 1994.
[4] P. Batavia, D. Померло и К. Торп, «Обнаружение обгонных транспортных средств
с использованием неявного оптического потока», Труды конференции по системам транспорта IEEE
, стр.729-734, 1997.
[5] M. Bertozzi, A. Broggi, M. Cellario A. Fascioli, P. Lombardi и
M. Porta, «Искусственное видение в дорожных транспортных средствах», Proceedings of the
IEEE — Специальный выпуск «Технологии и инструменты для визуального восприятия»,
90 (7): 1258-1271, июль 2002 г.
[6] М. Бетке, Э. Харитаоглу и Л. С. Дэвис, «Многофункциональная машина в реальном времени
.Обнаружение и отслеживание с движущегося транспортного средства », Машинное зрение и
Applications, 12: 69-83, 2000.
[7] М. Дж. Блэк, «Надежный инкрементный оптический поток», доктор философии. Thesis, Йельский университет
, 1992.
[8] А. Блейк и А. Зиссерман, Визуальная реконструкция, MIT Press,
1987.
[9] А. Броджи, П. Черри и П. К. Антонелло, “ Автомобиль с несколькими разрешениями
Обнаружениес использованием искусственного зрения », IEEE Intelligent Vehicles Symposium,
pp. 310-314, 2004.
[10] Т. Бюхер, К. Курио, Дж. Эдельбруннер, К. Игель, Д. Каструп, И. Лифкен,
г.Лоренц, А. Стейхаге и В. фон Зелен, «Обработка изображений и планирование поведения
для интеллектуальных транспортных средств», IEEE Transaction on
Industrial Electronics, 50 (1): 62-75, 2003.
[11] S. Карлссон и Дж. Эклунд, «Обнаружение объектов с использованием модели на основе
прогнозирования и параллакса движения», Европейская конференция по компьютерам
Vision, стр. 297-306, 1990.
[12] Я. Ченг, «Среднее смещение, режим Поиск и кластеризация », IEEE Trans-
действий по анализу шаблонов и машинному интеллекту, 17 (8): 790-799,
августа.1995.
[13] С.С. Чунг и К. Камат, «Надежные методы для фонового изображения
Вычитание в видео городского движения», Proceedings of SPIE, 5308: 881-
892, 2004.
[14] Д. Команичиу , «Объединение непараметрической информации для оценки движения —
mation», Труды Международной конференции IEEE по компьютерам
Vision and Pattern Recognition, pp. 59-66, 2003.
[15] Д. Команичиу, В. Рамеш, П. Меер, «Отслеживание в реальном времени жестких объектов, отличных от
, с использованием среднего сдвига», Труды Международной конференции IEEE
по компьютерному зрению и распознаванию образов, стр.142-149,
2000.
[16] В. Энкельманн, «Обнаружение препятствий путем оценки оптического потока
полей из последовательностей изображений», Image and Vision Computing, 9 (3): 160-
168, 1991
[17] В. Энкельманн, «Помощь водителю на основе видео — от базовых функций
до приложений», Международный журнал компьютерного зрения, 45 (3): 201-
221, 2001.
[18] К. Фукунага и Л. Хостетлер, «Оценка градиента
функции плотности с применением в распознавании образов», IEEE
Transactions on Information Theory, 21 (1): 32-40, Jan.1975.
[19] А. Джанкетти, М. Кампани и В. Торре, «Использование оптического потока
для дорожной навигации», IEEE Transactions по робототехнике и автоматизации,
14 (1): 34-48, 1998.
[20] Г. Голуб, У. фон Матт, “Регуляризация Тихонова для больших задач
”. Научные вычисления
, Джин Ховард Голуб (редактор), Springer, стр.
3–26, 1997.
[21] М. Хааг и Х.-Х. Нагель, «Комбинация граничных элементов и оптических оценок потока
для отслеживания транспортных средств на основе трехмерной модели в последовательностях дорожных изображений
», Международный журнал компьютерного зрения, 35 (3): 295-319,
1999.
[22] У. Хандманн, Т. Калинке, К. Цомакас, М. Вернер и В. фон Зелен,
«Компьютерное зрение для систем помощи водителю», Proceedings of SPIE,
3364: 136-147, 1998
[23] У. Хандманн, Т. Калинке, К. Цомакас, М. Вернер и В. фон Зелен,
«Система обработки изображений для помощи водителю», Image and Vision
Computing, vol. 18: 367-376, 2000.
[24] Т. Хасти, Р. Тибширани и Дж. Фридман, Элементы статистического обучения
: интеллектуальный анализ данных, вывод и прогнозирование, Springer-Verlag,
2001.
[25] HW Haussecker и DJ Fleet, «Вычисление оптического потока с
физических моделей изменения яркости», IEEE Transactions on Pattern
Analysis and Machine Intelligence, 23 (6): 661-673, 2001.
[ 26] DJ Heeger, «Оптический поток с использованием пространственно-временных фильтров», Internatioanl
Journal on Computer Vision, 2: 283-310, 1989.
[27] Ф. Хайц и П. Бутеми, «Мультимодальная оценка разрывных
оптических Поток с использованием марковских случайных полей », IEEE Transactions on
Pattern Analysis and Machine Intelligence, 15 (12): 1217-1232, 1993.
[28] SJ Julier и JK Uhlmann, «Недивергентный алгоритм оценки
в присутствии неизвестных корреляций», Proceedings of the American
Control Conference, 4: 2369-2373, 1997.
[29] T. Kalinke, C. Tzomakas и WV Seelen, «Обнаружение объекта
на основе текстуры и классификация на основе адаптивной модели», Международная конференция IEEE
по интеллектуальным транспортным средствам, стр. 143-148, 1998.
[30] В. Крюгер, «Надежная компенсация движения плоскости земли в реальном времени
от движущегося транспортного средства», Машинное зрение и приложения, 11: 203-
212, 1999.
[31] В. Крюгер, В. Энкельманн и С. Россл, «Оценка в реальном времени и отслеживание векторов оптического потока для обнаружения препятствий», IEEE Intel-
ligent Vehicle Symposium, стр. 304-309, 1995.
[32] A. Kuehnle, «Признание на основе симметрии для задних частей транспортных средств», Pattern
Recognition Letters, 12: 249-258, 1991.
[33] XR Li, Y.-M. Чжу, Дж. Ван и Ч.-З. Хан, «Оптимальная линейная оценка
Fusion-Часть I: Объединенные правила Fusion», IEEE Transactions on Information
Theory, 49 (9): 2192-2208, сентябрь 2003 г.
[34] Б. Лукас и Т. Канаде, «Метод итеративной регистрации изображений
с приложением к стереозрению», Международная объединенная конференция
по искусственному интеллекту, стр. 674-679, 1981.
[35 ] DW Marquardt, «Обобщенная обратная, гребенчатая регрессия, линейная смещенная
Улучшенная методика автоматического обнаружения дорожных происшествий с использованием связи транспортного средства с инфраструктурой
Обнаружение дорожных происшествий — одна из основных областей исследований интеллектуальных транспортных систем (ИТС).В последние годы многие мегаполисы страдают от интенсивного транспортного потока и заторов. Следовательно, мониторинг сценариев дорожного движения является сложной задачей из-за характера и характеристик дорожного происшествия. Надежное обнаружение дорожных происшествий и заторов предоставляет полезную информацию для повышения безопасности дорожного движения и указывает характеристики дорожных происшествий, нарушение правил дорожного движения, схему вождения и т. Д. В этом документе исследуется оценка дорожного происшествия с помощью метода гибридного наблюдателя (HO) и обнаруживается дорожно-транспортное происшествие с использованием улучшенного метода автоматического обнаружения происшествий (AID), основанного на механизме скорости смены полосы движения в условиях дорожного движения.Во-первых, мы разработали связь между транспортными средствами и придорожными блоками (RSU) с помощью маякового механизма. Затем они будут обмениваться информацией, как только автомобили получат доступ к беспроводной сети. Во-вторых, мы использовали вероятностный подход для сбора данных дорожной информации, используя связь между транспортными средствами и инфраструктурой (V2I). В-третьих, мы оценили дорожно-транспортное происшествие с помощью метода HO, который может обеспечить точную оценку произошедшего события. Наконец, для точного обнаружения дорожно-транспортных происшествий мы применили вероятностные данные, собранные с помощью связи V2I, на основе механизма скорости смены полосы движения.Экспериментальные результаты и анализ, полученные в результате моделирования, показывают, что предлагаемый метод превосходит другие методы с точки зрения получения более точной оценки дорожного происшествия, которая хорошо согласуется с теоретическим происшествием, примерно на 30% более быстрого обнаружения дорожных происшествий и на 25% более быстрого рассеивания дорожных заторов. . Что касается продолжительности дорожно-транспортного происшествия, предложенная система получила лучшую кривую Каплана-Мейера (КМ), на которую влияет наименьшая продолжительность времени на ликвидацию дорожно-транспортного происшествия по сравнению с другими методами.
1. Введение
В последние годы интеллектуальные транспортные системы (ИТС) привлекают большое внимание исследователей в области беспроводных и коммуникационных технологий. Это вызывает беспокойство у транспортных властей из-за большого количества транспортных средств на дороге, вызывающих дорожные происшествия, заторы, узкие места на дорогах и т. Д. ITS интегрирует технологию беспроводной связи с транспортными сетями, чтобы обеспечить безопасность движения, уменьшить загруженность дорог и улучшить управление движением [1, 2].Помимо обеспечения безопасности дорожного движения, ITS также предоставляет развлекательные услуги на транспортных средствах, такие как климатическая информация, доступ в Интернет и т. Д. Во многих городах мира люди используют частные автомобили, такси и автобусы, чтобы добраться до места назначения. Поскольку условия движения на дороге могут быстро стать тяжелыми, это может повлиять на транспортные операции. В частности, многие мегаполисы страдают от сильных транспортных заторов в городских условиях и на автомагистралях, вызванных дорожным происшествием [3].Как следствие, потери и нарушения, вызванные дорожным происшествием, напрямую связаны с продолжительностью дорожного происшествия, что может еще больше ухудшить транспортный поток. В этом контексте раннее обнаружение инцидентов необходимо для расследования и реализации стратегии трафика для ИТС. Такое раннее обнаружение инцидентов может уменьшить перегрузку трафика и, следовательно, улучшить поток трафика для системы мониторинга трафика в режиме реального времени в ITS [4].
Дорожным происшествием называется резкое изменение транспортного потока, которое снижает пропускную способность дороги и увеличивает загруженность дорог.В прошлом дорожно-транспортное происшествие было очень сложно проанализировать из-за постоянно меняющегося характера происшествий, что усложняло обнаружение транспортных властей. Такая сложность может стать причиной выхода из строя системы управления перевозками. Следовательно, существует большая потребность в разработке сложного алгоритма, способного оценивать и обнаруживать дорожные происшествия. Сложной задачей ИТС является оценка и обнаружение инцидента по сценариям перегрузки трафика [5].Вообще говоря, инцидент называется возникновением события, которое создает нарушение нормального транспортного потока [6]. На дороге устанавливаются камеры видеонаблюдения для обнаружения дорожного происшествия. Обнаружение и классификация инцидентов — очень важный аспект в системе управления дорожным движением. Система управления дорожным движением имеет возможность проводить автоматическую классификацию инцидентов (AIC) для оценки различных типов инцидентов [7].
Как упоминалось, в прошлом было предложено множество методов, которые используются для сбора данных с детекторов, таких как петлевой детектор, радар-детектор, видеодетектор и т. Д.В этом контексте коммуникационная система V2I используется для сбора данных с транспортных средств с целью обнаружения дорожных происшествий. Связь V2I — это надежная система, которая считается очень полезной в ИТС [8, 9]. Собранные данные обрабатываются алгоритмами AID, которые могут генерировать оповещения об инцидентах в случае любых дорожных происшествий и нарушений. Дорожные происшествия можно обнаружить с помощью детектора глобальной системы позиционирования (GPS). Asakura et al. [10] представили свойства динамики транспортного потока в условиях инцидента с использованием плавающих данных, собранных с GPS.В этой схеме предложенный метод позволяет прогнозировать время и место перегрузки трафика, вызванного дорожным происшествием. На дороге устанавливаются камеры видеонаблюдения для обнаружения дорожного происшествия. Обнаружение и классификация инцидентов — очень важный аспект системы управления дорожным движением. Система управления дорожным движением имеет возможность проводить автоматическую классификацию инцидентов (AIC) для оценки различных типов инцидентов [7]. Ren et al. [11] представили основанную на видео методику мониторинга и обнаружения дорожно-транспортных происшествий путем оценки характеристик распределения состояний дорожного движения на участке дороги.Система обнаружения инцидентов (IDS) играет важную роль в ИТС, которая в последние годы привлекает большое внимание исследовательского сообщества. IDS предназначены для обнаружения инцидентов или неприятных ситуаций, таких как дорожные происшествия, нарушения правил дорожного движения и заторы на дорогах, с использованием коммуникационных технологий [5, 6]. Основной проблемой для ИТС является получение раннего и точного обнаружения дорожных происшествий [12].
В последние десятилетия методы машинного обучения широко использовались для обнаружения дорожно-транспортных происшествий.Обсуждались многие искусственные нейронные сети (ИНС) [7]. Ричи и Чеу [13] представили технику ИНС, которая позволяет обнаруживать дорожные происшествия с большей производительностью. Однако набор параметров ИНС очень сложен и труднодоступен. Предлагается гибридный подход, объединяющий анализ временных рядов и схемы машинного обучения для обнаружения инцидентов [14]. Такой подход может точно обнаруживать дорожные происшествия. Jin et al. [15] представили конструктивную вероятностную нейронную сеть (CPNN) в условиях дорожного движения.Эта модель протестирована на I-880 и оценена с учетом дорожных ситуаций онлайн и офлайн. Однако такой подход позволяет обнаруживать только небольшие дорожные происшествия.
Для повышения производительности AID была введена машина опорных векторов (SVM) для обнаружения дорожных происшествий [4, 16, 17]. В [4] два SVM были обучены и смоделированы на данных о дорожно-транспортных происшествиях. Этот метод не дал надежного результата, потому что критерии выбора параметров SVM и ядер всегда очень сложны в процессе обучения для построения выборки.Сяо [18] представил метод обучения ансамбля SVM и -Nearest Neighbor (KNN) для обнаружения дорожных происшествий. Эта модель обучает обучению SVM и KNN и комбинирует их для получения лучших результатов. Wang et al. [7] представили инцидентную классификацию данных трафика с использованием метода SVM. Однако этот метод не может поддерживать небольшие данные трафика и требует гораздо больше времени для обработки данных трафика из-за характеристик сигналов ST. В социальных сетях, таких как Twitter, он стал самым известным инструментом, используемым для сбора информации, и имеет большую базу данных учетных записей пользователей, которая может делиться частью данных с публикой с помощью API [19].В последние годы было предложено множество работ по обнаружению дорожного происшествия путем анализа места и времени происшествия по твитам. В исх. [19], Гу и др. представили обнаружение трафика из Twitter в реальном времени с помощью REST API. Предлагаемый метод использует полунаивный байесовский метод (SNB) для обнаружения пяти различных инцидентов и повышения производительности. Однако обработка твитов о различных инцидентах часто требовала большого вычислительного времени. Schulz et al. [20] представили метод обнаружения мелких инцидентов путем анализа микроблогов.Этот метод обеспечивает лучшее обнаружение инцидента, но применим только для низкоуровневых приложений.
Дабири и Хизлип [21] предложили структуру, которая может отслеживать и обнаруживать дорожные происшествия на основе твитера с использованием метода глубокого обучения. Предлагаемый метод использовал большое количество твитов для оценки состояния дорожного события и требовал большого вычислительного времени для обработки этих твитов. Zhang et al. [22] представил новый метод обнаружения дорожных происшествий из твитов с использованием метода глубокого обучения.Предложенный метод использовал миллионы твитов и применялся в двух мегаполисах. Это также позволило улучшить обнаружение дорожных происшествий, затратив при этом много времени на обработку миллионов твитов. Paule et al. [23] предложили метод геолокации твита, используя алгоритм взвешивания голосов, при котором вес голосов твитов зависит от надежности пользователя. Предлагаемый метод позволяет лучше обнаруживать дорожные происшествия в реальном времени. Однако из-за увеличения числа голосующих пользователей предлагаемый метод ограничен меньшим охватом, а также ограниченными пользователями.
Алгоритм AID используется для вычисления новых значений параметров из собранных данных и последующего сравнения этих значений с пороговыми значениями для идентификации обнаружения инцидента. Несколько известных методов попадают в эту категорию, например, алгоритм Макмастера [24] и алгоритм Калифорнии [25]. В последнее время для повышения производительности существующих схем AID использовались многие подходы, такие как интеграция связи V2I с байесовской схемой [26], которая ориентирована на уменьшение потока трафика для обнаружения инцидента.He et al. [27] предложили метод квантильной регрессии на основе гибридного дерева для прогнозирования и оценки продолжительности инцидента. Представленный метод дал лучшие результаты по сравнению с другими прогностическими моделями. Peeta et al. [28] также предложили схему переменного знака сообщения (VMS), которая сосредоточена только на прогнозировании времени устранения инцидента из-за задержки, вызванной аварией.
Lu et al. [29] предложил метод обнаружения дорожных происшествий на основе nFoil. Этот метод был реализован на реальных данных о трафике и смоделированных данных о трафике, сгенерированных на сингапурском шоссе.Предложенный метод позволил лучше выявить дорожно-транспортное происшествие. Однако для обработки данных о трафике требовалось больше времени. Wang et al. [30] представили эффективный фильтр частиц с несколькими моделями (EMMPF) для оценки и обнаружения дорожно-транспортных происшествий. Основная идея состоит в том, чтобы реализовать EMMPF для сокращения большого вычислительного времени, которое происходило в традиционных методах AID во время обучения наборов данных. Предлагаемая система способна сократить большое время вычислений, а предлагаемый метод ограничен только гибридной системой, которая содержит большую модель.Основываясь на анализе GPS, Д’Андреа и Марчеллони [5] предложили метод обнаружения дорожно-транспортных происшествий и заторов, чтобы повысить уровень обнаружения происшествий. Однако предлагаемая система не могла различить дорожное происшествие и событие затора из-за корреляции данных GPS, собранных с движущихся или медленно движущихся транспортных средств. Fogu et al. [31] представили систему e-Notify, которая способна быстро обнаруживать дорожно-транспортное происшествие, а также сокращать время продолжительности происшествия за счет реализации эффективной связи посредством комбинации V2I и V2V соответственно.В прошлом для обнаружения дорожно-транспортных происшествий предлагалась улучшенная модель, основанная на непараметрической регрессии [32]. Попеску и др. [33] представили схему AID, в которой механизмы расстояния смены полосы движения и скорости смены полосы движения использовались для обнаружения дорожного происшествия на основе сбора данных информации о дорожном движении с использованием связи V2I. Однако этот метод требует больше времени для обработки данных о трафике с точки зрения расстояния смены полосы движения транспортного средства, а также эта схема не может различить узкое место на дороге, вызванное дорожным происшествием.
Оценка и обнаружение дорожно-транспортных происшествий — одна из основных проблем в ИТС. В прошлом предыдущие исследования показали, что AID — это хорошо известный и надежный метод обнаружения дорожно-транспортных происшествий. Кроме того, метод AID может преодолеть заторы на дорогах в том месте, где возникновение инцидента вызвало затруднения движения, такие как узкое место на дороге, аварии и отключенные транспортные средства, неисправность электронного оборудования и другие проблемы, которые могут нарушить транспортный поток.Значительный мониторинг, оценка и обнаружение дорожных происшествий предоставляют соответствующую информацию, связанную с дорожным движением, для повышения безопасности дорожного движения и повышения качества вождения, предоставляя водителю информацию о дорожном движении в режиме реального времени для помощи в принятии решения. В частности, мониторинг дорожного движения, управление дорожными происшествиями и управление безопасностью дорожного движения являются основными опорами для улучшения ИТС. Это вдохновило нас на дальнейшее исследование оценки и обнаружения дорожного происшествия. В частности, оценка дорожного происшествия и его обнаружение так или иначе связаны с проблемой распознавания образов, в которой происшествие и не происшествие должны быть оценены и классифицированы.Сложный метод обучения может быть применен к AID после обучения данных. До сих пор для решения этой проблемы использовались машина опорных векторов, нейронная сеть и методы глубокого обучения. Эти методы зависят от систем пропозиционального обучения, что указывает на то, что данные, полученные с помощью этих систем, являются пропозициональными и ненадежными. Кроме того, несколько алгоритмов AID, таких как алгоритм Макмастера [24] и алгоритм Калифорнии [25], используются для вычисления новых значений параметров из собранных данных и сравнения этих значений с пороговыми значениями для идентификации обнаружения инцидента.Оценка дорожного происшествия может быть неточной из-за гибридного моделирования, в котором дорожное происшествие может произойти в любом месте с различными условиями дорожного движения. Оценка дорожно-транспортных происшествий с помощью метода HO и обнаружение происшествий с помощью улучшенного метода AID плохо освещены в приведенных выше исследованиях. Кроме того, данные трафика не использовались для анализа условий происшествия.
В этой статье мы представили эффективную систему ITS, которая способна оценивать и обнаруживать дорожные происшествия с помощью гибридного наблюдателя, и усовершенствованный метод AID, соответственно.Предлагаемая система в значительной степени использовала наблюдение PWSL для оценки дорожного происшествия и вероятностный сбор данных о дорожном движении для обнаружения дорожного происшествия. Во-первых, мы разработали связь между транспортными средствами и RSU с помощью маякового механизма. Как только соединение будет установлено, они будут обмениваться информацией о трафике. Во-вторых, мы используем метод HO для оценки дорожного происшествия, эти оценки могут обеспечить точную оценку происходящего события. В-третьих, для точного обнаружения дорожного происшествия в предлагаемом методе используется вероятностный подход для сбора данных информации о дорожном движении с использованием связи V2I на основе механизма скорости смены полосы движения.
Остальная часть этого документа построена следующим образом. В Разделе 2 представлено моделирование системы, в котором обсуждались механизмы подписи транспортных средств и сигналов радиобуя. В разделе 3 представлен вероятностный подход к получению данных дорожной информации. В разделе 4 представлена предлагаемая оценка дорожно-транспортного происшествия и метод обнаружения. В разделе 5 обсуждается сравнение предложенной модели с различными компетентными методами. Результаты моделирования представлены в разделе 6. Наконец, раздел 7 завершает эту статью.
2. Модель системы
В этой работе мы предположили, что автомобили оснащены беспроводным модулем, который используется для связи с блоками RSU, размещенными на дороге, для обмена информацией о дорожном движении с любыми проезжающими автомобилями. Кроме того, предполагается, что транспортные средства оснащены регистратором данных о событиях (EDR) [34], который используется для отслеживания быстрого ускорения, скорости и информации о полосе движения транспортных средств.
На рисунке 1 изображена системная модель движения транспортных средств по шоссе на дороге с движением транспортных средств в прямом направлении.RSU размещены на дороге друг от друга на расстоянии почти 1,5 км. Эти RSU способны обеспечить равное покрытие поблизости. Кроме того, RSU, расположенные на прилегающей и противоположной стороне дороги, используются для строительства инфраструктуры. Каждый RSU содержит устройство GPS для определения точного местоположения транспортных средств, радиоприемник для установления связи между проезжающими транспортными средствами и вычислительное устройство, обрабатывающее данные дорожной информации, полученные от транспортных средств, такие как скорость и расстояние при смене полосы движения.
Как показано на рисунке 2, на рисунке 2 (a) показано, что транспортные средства движутся в прямом направлении с постоянной скоростью, а на рисунке 2 (b) показано аномальное изменение скорости транспортного средства во время смены полосы движения, вызвавшее дорожно-транспортное происшествие.
2.1. Подпись транспортного средства
В предлагаемом методе каждое транспортное средство должно зарегистрироваться и зарегистрировать свои данные в транспортной администрации (TA). TA отвечает за управление базой данных транспортных средств, такой как идентификаторы транспортных средств, личную информацию водителей, а также выдачу сертификатов на транспортные средства.Важно, чтобы все автомобили были подключены к ТА.
Зависящее от времени секретное действие от имени TA для проверки личности транспортного средства и того, когда оно отправило сообщение в последний раз. Секрет можно вычислить и зашифровать, как показано ниже.
Предположим, транспортное средство отправило запрос на регистрацию в TA в определенный момент времени. Сначала TA проверит идентичность, а затем сгенерирует ответ, содержащий три параметра, где — симметричный ключ, и два целых значения.
И транспортное средство, и TA должны инициализировать счетчик значением и увеличивать его на каждое сообщение, полученное автомобилем.
2.2. Механизм сигнала маяка
В этом разделе мы обсуждаем процесс передачи сигнала маяка. После входа в систему каждое транспортное средство отправляет сигнал маяка, периодическое сообщение, каждую секунду, чтобы поделиться подробной информацией, такой как недавнее местоположение, псевдоидентификация и тип транспортного средства, для RSU.
Предположим, что транспортное средство устанавливает маяк и передает, установленный маяк выражается следующим образом.
, где — псевдоидентификация транспортного средства, используется для защиты от атак повторного воспроизведения, — это процесс входа транспортного средства. является зашифрованным местоположением и является сигналом радиомаяка с использованием хэш-функции [35].
Уравнение (3) используется для расчета сигнала маяка. Допустим, когда транспортное средство-свидетель получил сообщение, оно немедленно проверяет функцию отметки времени принятого маяка, а затем проверяет сигнал маяка. Если оба значения совпадают, значит, содержание маяка правильное.Таким образом, маяк считается действующим в непосредственной близости от аварийного транспортного средства.
Как показано на рисунке 3, общее время, необходимое для обмена информацией о дорожном движении между транспортным средством и RSU, — это время, когда транспортное средство ожидает приема маяка, и в то время, когда транспортное средство и RSU начинают устанавливать соединение. Как только транспортное средство получит доступ к беспроводной среде, оно будет обмениваться информацией, такой как идентификатор, скорость, ускорение, с RSU во время и обмениваться информацией от RSU к транспортному средству во время, соответственно.
3. Сбор данных дорожной информации
Из-за огромного транспортного потока в городской транспортной среде данные о внешних факторах на дороге часто связаны с другими транспортными средствами. Следовательно, очень сложно собирать и обрабатывать данные от каждого транспортного средства, проезжающего через RSU. Чтобы получить точное обнаружение дорожного происшествия. Во-первых, мы применили вероятностный подход для сбора данных с проезжающих транспортных средств [36].
Мы предположили, что RSU активны и могут собирать информацию о дорожном движении от транспортных средств, проезжающих через RSU, с вероятностью.В частности, транспортные средства способны поддерживать базу данных надежной информации о дорожном движении для определения условий дорожного движения, которые указывают на признаки дорожно-транспортных происшествий. Данные, собранные по количеству транспортных средств, с вероятностью могут обеспечить оптимальное агрегирование. Для некоторых приложений колеблется от [36].
Предположим, что событие вызвано происшествием транспортного средства, то есть транспортного средства (см. Рисунок 4), количества транспортных средств, проезжающих по дороге для успешной агрегации. Позвольте быть случайной величиной, которая отслеживает количество транспортных средств, которые предоставили информацию о дорожном движении среди проезжающих транспортных средств.Так что уравнение можно записать следующим образом.
Уравнение (4), наблюдаемое как биномиальная функция,
, где
Уравнение (4) может быть выражено следующим образом.
Предположим, что цель инцидента вызвана. Для обнаружения события, которое должно удовлетворять приведенному ниже условию.
Транспонирование может быть приведено ниже.
После применения натурального логарифма к уравнению (9) и последующего деления на, окончательное уравнение можно выразить, как показано ниже.
Уравнение (10) используется для определения количества транспортных средств, которое необходимо для значимого агрегирования при событии, вызванном происшествием транспортного средства в условиях дорожного движения.
4. Предлагаемая оценка и обнаружение дорожно-транспортных происшествий
4.1. Проектирование PWSL Hybrid Observer
Проектирующий наблюдатель используется для оценки и восстановления состояний трафика выделенной системы с использованием измеримых переменных. Поскольку природа и характеристики транспортных систем сложны, гибридный наблюдатель может оценить возможность возникновения события, которое обнаруживает дорожный инцидент.Чтобы получить точную оценку дорожно-транспортного происшествия, модель PWSL и гибридный наблюдатель объединяются вместе для получения более точной оценки [37].
Для оценки дорожного происшествия мы разработали структуру гибридного наблюдателя с PWSL, которая записывается как.
где — коэффициент усиления наблюдателя в режиме дорожно-транспортного происшествия. связан с PWSL для обеспечения точной оценки дорожного происшествия с теоретическим происшествием при любых условиях дорожного движения. Следовательно, наблюдаемые выигрыши обеспечивают сходимость оцененной ошибки и стабилизируют матрицы.
Оценка инцидента трафика в непрерывном состоянии сходится с теоретическим инцидентом с использованием непрерывного потока трафика, и непрерывный выходной сигнал может быть выражен следующим образом.
где — матрица со структурами, зависящими от условий или состояния трафика.
Оценка дорожного происшествия зависит от нескольких факторов, таких как сценарии дорожного движения, дорожные условия, транспортный поток и т. Д. На рисунке 4 показана оценка дорожного происшествия, основанная на данных, связанных с дорожным движением, и постоянном наблюдателе. Используя механизм непрерывного наблюдения, мы можем получить точную оценку дорожно-транспортных происшествий.
4.2. Оценка состояния трафика
В большинстве подходов к оценке использование функции Ляпунова обеспечивает асимптотическую сходимость оцененной ошибки [38].Кратная функция Ляпунова ввела кусочную функцию Ляпунова из-за природы кусочно-гибридной системы, чтобы гарантировать снижение ошибок [39].
Для решения проблемы HO, которая полагается на определение усиления наблюдателя, оценочное дорожное происшествие может сходиться с теоретическим происшествием. Следовательно, разницу в возможной ошибке между теоретическим и предполагаемым инцидентом можно выразить следующим образом.
Сходимость ошибки оценки дорожного происшествия требуется для получения коэффициента усиления гибридного наблюдателя (11), который гарантирует, что это матрица Гурвица.
4.3. Обнаружение дорожно-транспортного происшествия
Для обнаружения дорожного происшествия на основе скорости смены полосы движения блоки RSU сначала собирают информацию о дорожном движении, связанную с изменением скорости между транспортными средствами, а затем анализируют и оценивают скорость транспортного средства в условиях происшествия и отсутствия происшествий. Другими словами, при непредвиденных условиях, среднее изменение скорости за более короткое среднее время при смене полосы движения по сравнению с условиями происшествия. В этом методе мы использовали собранную информацию о дорожном движении от RSU, связанную с изменением скорости транспортного средства, чтобы оценить, произошел ли инцидент, когда скорость транспортного средства при смене полосы движения попадает в критическую область определенных пороговых значений.
На рис. 5 показан процесс смены полосы движения, в ходе которого было определено, что три автомобиля, и движутся по дороге. Транспортное средство переключается с полосы 2 в «точке a» на полосу 1 в «точке b», чтобы обойти и пересечь транспортное средство. Неправильное изменение скорости с «a» на «b», вызванное поведением водителя, которое создает помехи для других транспортных средств на дороге, что впоследствии может вызвать дорожно-транспортное происшествие. Мы предположили, что аномальное изменение скорости при смене полосы движения транспортным средством также вызывает изменение и нарушение скорости транспортного средства.RSU вычисляет среднее изменение скорости, которое произошло при смене полосы движения, и соответствующее среднее время. Основываясь на этих параметрах, мы определили пороговый уровень. Если изменение скорости попадает в область порогового значения инцидента, это ясно указывает на то, что инцидент произошел, что вызвано аномальным превышением скорости во время смены полосы движения.
5. Сравнение моделей
В ИТС проверка модели считается важным параметром, поскольку она позволяет оценить эффективность представленного метода.Тем не менее, исследование и эмпирическое расследование показали, что обнаружение дорожно-транспортных происшествий является более сложным и трудным, чем другие традиционные происшествия, из-за характера и характеристик дорожного происшествия. Эти характеристики зависят от структуры трафика, шаблона и сбора данных информации о трафике из инфраструктуры. В прошлом было предложено много традиционных методов AID, которые исследуют дорожные происшествия в различных сценариях дорожного движения [24, 25].Чтобы оценить эффективность предлагаемого метода, мы сравнили результаты с традиционными методами AID. Кроме того, представленный метод дополнительно подтверждается оценкой КМ [40], которая используется для оценки продолжительности дорожных происшествий и разрешения дорожных происшествий с помощью других компетентных методов.
5.1. Область порогового значения инцидента
На рисунке 6 показано среднее изменение скорости со средним временем для механизма смены полосы движения в области порога обнаружения инцидента, то есть сценарии инцидента и не инцидента.Можно видеть, что, когда полоса движения перегружена из-за узкого места на дороге, средняя скорость транспортного средства изменяется за гораздо более короткое среднее время в непредвиденных условиях по сравнению с условиями происшествия. В этом методе предложенный метод использует собранные данные о дорожном движении от RSU, связанные с изменением скорости транспортного средства, чтобы оценить, произошел ли инцидент, когда изменяющаяся скорость полосы движения попадает в критическую область определенных пороговых значений.
5.2. Оценка дорожно-транспортного происшествия
На рисунке 7 показано сравнение теоретического происшествия с предполагаемым происшествием. При моделировании мы рассмотрели три случая, такие как низкая, средняя и высокая плотность трафика. На рисунке 7 (а) показано сравнение теоретического и предполагаемого дорожно-транспортных происшествий с низкой плотностью дорожного движения. Из рисунка 7 (а) видно, что обнаружение дорожно-транспортного происшествия требует больше времени для обнаружения и устранения происшествия. Однако оценка дорожно-транспортного происшествия близка к теоретической, что указывает на то, что предлагаемый метод может оценивать дорожные происшествия в случае низкой плотности движения.
При умеренной плотности трафика эффективность предлагаемого метода с точки зрения оценки дорожных происшествий показана на Рисунке 7 (b). Получена явно улучшенная оценка дорожного происшествия. Кроме того, он имеет самую быструю очистку от обнаружения инцидентов. В частности, предложенный метод позволил получить лучшую оценку дорожного происшествия, чем низкая плотность дорожного движения, и оценка дорожного происшествия как-то согласовалась с теоретическим дорожным происшествием.
На рисунке 7 (c) показано сравнение теоретического происшествия с предполагаемым происшествием при очень высокой плотности движения.Предложенный метод позволил получить наиболее надежную оценку дорожного происшествия по сравнению с низкой плотностью трафика и умеренной плотностью трафика. И предполагаемое дорожно-транспортное происшествие также очень близко к теоретическому. Это свидетельствует о том, что предложенный метод хорошо согласуется с теоретическим происшествием.
5.3. Обнаружение дорожно-транспортных происшествий
На рисунке 8 показано сравнение предложенного метода с другими методами. В нашем моделировании мы предположили, что, когда инцидент произошел, он привел к заторам на дорогах.Результаты моделирования, показанные на рисунке 8, показывают, что дорожная перегрузка зависит от дорожного происшествия. В частности, загруженность движения зависит от количества транспортных средств, которые выбирают альтернативные маршруты после того, как произошел инцидент. Из рисунка 8 видно, что предложенная система обеспечивает наиболее быстрое обнаружение дорожного происшествия. Кроме того, когда происшествие выясняется полицией, предлагаемый метод обеспечивает максимально быстрое рассеивание заторов на дорогах.
На рисунке 8 (а) показано сравнение предложенного метода с сильными заторами трафика, составляющими 25% отводимого трафика.Видно, что улучшенная методика AID способна обнаруживать самые быстрые дорожные происшествия по сравнению с другими методами. На Рисунке 8 (b) показано сравнение предложенного метода с 35% перенаправления трафика. В то время, когда произошел инцидент, 35% автомобилей едут по другим маршрутам. Посредством моделирования можно заметить, что предлагаемый метод обеспечивает лучшее обнаружение инцидентов и самое быстрое рассеивание заторов на дорогах. На рисунке 8 (c) показано сравнение предложенного метода с 45% перенаправления трафика.Предлагаемый усовершенствованный метод AID позволяет максимально быстро обнаруживать инциденты и рассеивать заторы на дорогах.
Из рисунка 9 мы можем оценить характеристики кривых КМ между предлагаемым методом и другими методами AID. Видно, что по длительности инцидента калифорнийский алгоритм и интегрированный метод похожи друг на друга. Характеристики этих алгоритмов требовали больше времени для уведомления полиции об инциденте, а также больше времени для буксировки и ликвидации инцидента.Кривая KM для продолжительности инцидента с методом AID (CLD / CLS) показала лучшие характеристики, чем интегрированный и калифорнийский методы. После получения жалобы полиция прибыла на место происшествия в кратчайшие сроки, чтобы отбуксировать транспортные средства, происшедшие при происшествии, и впоследствии устранить происшествие. Используя предложенный метод, полиция смогла устранить происшествие в кратчайшие сроки, отбуксировав подрывные машины. Результаты проверки показывают, что предлагаемый метод имеет возможность оценивать и обнаруживать дорожные происшествия с максимальной скоростью обнаружения.Что касается продолжительности инцидента, из рисунка 9 видно, что предложенная модель получила лучшую кривую KM за счет достижения самой короткой продолжительности времени для устранения инцидента среди всех других схем.
6. Результаты моделирования
6.1. Обмен данными между транспортным средством и RSU
В нашем моделировании мы предположили, что средняя скорость транспортных средств, проезжающих от RSU, варьировалась от 20 до 80 миль в час в условиях дорожного движения. Вероятность обмена дорожной информацией между транспортным средством и RSU была определена с использованием низких скоростей передачи данных, таких как 512 кбит / с и 1 Мбит / с, и высоких скоростей передачи данных, таких как 2 Мбит / с.Как показано на рисунке 10, результаты, полученные в результате моделирования, показали, что вероятность обмена дорожной информацией уменьшается с увеличением средней скорости транспортных средств, проезжающих через RSU. Поскольку транспортное средство движется с низкой скоростью 50 миль в час и ниже, оно будет оставаться в зоне покрытия RSU в течение более длительного времени и сможет обмениваться точной информацией о дорожном движении при более низких скоростях передачи данных, например 512 кбит / с. Когда средняя скорость транспортного средства превышает 55 миль в час, вероятность успешного обмена дорожной информацией имеет место между проезжающими транспортными средствами и RSU при более высокой скорости передачи данных, например 2 Мбит / с, что обеспечивает более высокую вероятность обмена дорожной информацией.
6.2. Связь транспортных средств с каждым расположением RSU
Имитационное испытание проводится для изучения влияния транспортных средств, следующих к каждому RSU, на вероятность успешного обмена информацией, как показано на рисунке 11. Мы разместили четыре RSU на расстоянии 1,5 км друг от друга. друг друга, которые способны обнаруживать изменение скорости транспортного средства, которое зависит от неправильного обгона и может привести к возникновению дорожно-транспортного происшествия. Эти RSU могут получать информацию о дорожном движении и фактах насилия каждого транспортного средства в пределах их досягаемости.Четыре типа транспортных средств, такие как транспортное средство, транспортное средство, транспортное средство и другие транспортные средства, используются в сценарии одностороннего трехполосного движения. Видно, что при смене полосы движения автомобиль обгоняет другое транспортное средство на расстоянии от места нахождения RSU примерно 5–10 км. Из рисунка 11 видно, что вероятность получения информации о дорожном движении увеличивается по мере того, как транспортные средства движутся к следующему местоположению RSU. Таким образом, создается прочная связь между транспортным средством и RSU, которая успешно ведет к обмену информацией о дорожном движении между проезжающими автомобилями и каждым местоположением RSU.
6.3. Вероятностное сравнение данных дорожной информации
На рисунке 12 показано влияние количества транспортных средств на вероятность сбора данных. Чтобы точно обнаруживать дорожные происшествия, мы предположили несколько параметров, цель происшествия, параметр приложения, который может точно обнаруживать происшествие, и вероятность того, что транспортное средство сможет связаться с RSU. Подставляем все эти значения в уравнение (10), после решения мы получили, что 32 автомобиля могут связываться с RSU с вероятностью 90%.Таким образом, это указывает на то, что RSU может получать данные дорожной информации 32 транспортных средств, включая аварийное транспортное средство, а также используется для обнаружения дорожных происшествий, вызванных транспортным средством, с более высокой точностью.
6.4. Критерии тестирования производительности
В этом разделе мы оцениваем производительность предлагаемого метода с другими хорошо известными методами, такими как наивный байесовский метод, SVM и KNN, используя три критерия, то есть частоту ложных тревог (FAR), скорость обнаружения (DR) и классификацию. ставка (CR) [41].
, где FAR — частота ложных тревог, — количество случаев ложных тревог и — общее количество неаварийных случаев.
, где DR — частота обнаружения инцидентов, это количество обнаруженных инцидентов и общее количество зарегистрированных инцидентов.
, где CR — коэффициент классификации, который используется для определения обнаружения инцидента, — это количество правильно классифицированных событий и общее количество событий.
Далее мы оцениваем эффективность предложенного метода с помощью индекса производительности (PI), который можно записать, как показано ниже.
где, и — вес DR, FAR и CR соответственно. Мы предположили, что значения веса DR, FAR и CR равны 1/2. Большее значение PI указывает на то, что предложенный метод обеспечивает лучшее обнаружение дорожных происшествий. В частности, чем меньше значение FAR, тем выше вероятность точного обнаружения дорожного происшествия. Производительность DR указывает, что, когда значения DR приближаются к 100%. Это ясно указывает на то, что алгоритм способен хорошо обнаруживать дорожные происшествия.Однако более высокие значения DR могут вызвать ложную тревогу.
Чтобы оценить эффективность предлагаемого метода, мы дополнительно демонстрируем производительность предлагаемого метода на наборах данных I-880 для оценки значений FAR, DR, CR и PI и сравниваем эти значения с другими методами. На рисунке 13 показано сравнение предложенного метода с другими компетентными методами с точки зрения значений FAR, DR, CR и PI. Из рисунка 13 (а) видно, что предложенный метод получил меньшие значения FAR по сравнению с методом SVM.Кроме того, мы можем наблюдать, что методы Наивного Байеса и KNN дают худшие значения FAR по сравнению с методом SVM.
Как показано на Рисунке 13 (b), предложенный метод получил самые высокие значения DR, которые указывают на точное обнаружение дорожного происшествия. Кроме того, можно видеть, что метод KNN получил лучшие значения DR для точного обнаружения дорожного происшествия по сравнению с методами Naives Bayes и SVM. Из-за природы и характеристик инцидента методы Наивного Байеса и SVM не могут обнаружить инцидент, связанный с дорожным движением.
Из рисунков 13 (b) и 13 (c) можно заметить, что результаты метода KNN в DR и CR очень близки к предлагаемому методу. Кроме того, на Рисунке 13 (а) значения FAR SVM очень близки к предлагаемому методу. Также из рисунка 13 (d) можно увидеть, что предложенный метод дает лучшие значения PI по сравнению с другими компетентными методами. Таким образом, он ясно демонстрирует, что улучшенные значения FAR, DR, CR и PI повысили производительность предложенного метода, таким образом, предложенный метод имеет возможность обнаруживать дорожные происшествия в наборах данных I-880.
Более конкретно, из рисунка 13, значения наблюдения минимизировали значения FAR, когда значение DR было больше 0,90. По значению наблюдения предложенный метод получил значения FAR, DR, CR и PI 0,018, 0,952, 0,925 и 0,915, соответственно, по сравнению с KNN 0,1912, 0,937, 0,909 и 0,905 соответственно. Очевидно, что улучшенные значения указывают на то, что предложенный метод получил лучшие значения FAR, DR, CR и PI по сравнению с другими хорошо известными методами, такими как методы Naive Bayes, KNN и SVM.
6.5. CPU Timing
На рисунке 14 показано сравнение CPU предложенного метода с методами KNN и SVM. Когда поток трафика равен 10, процессорное время предложенного метода и других методов было очень низким. По мере увеличения потока трафика ЦП требовалось больше времени для обработки входного набора данных. Из рисунка 14 видно, что методы KNN и SVM требовали большего времени ЦП из-за использования большего количества входных данных, что впоследствии требовало больше времени для обработки набора данных. Предлагаемый метод требует меньше процессорного времени для обработки входного набора данных по сравнению с другими компетентными методами.
7. Заключение
Оценка и обнаружение инцидентов являются важными параметрами в ИТС для уменьшения заторов, повышения дорожного движения и безопасности дорожного движения. Однако дорожно-транспортное происшествие может вызвать узкие места на дорогах, заторы на дорогах и нарушить нормальный транспортный поток. В этой статье мы предложили модель ITS, которая может оценивать дорожные происшествия с помощью метода HO, а затем обнаруживать дорожные происшествия с помощью улучшенной техники AID в условиях дорожного движения на автомагистралях.Во-первых, мы представляем гибридный метод наблюдателя для оценки дорожного происшествия на основе комбинации модели PWSL и метода оценки модели. Во-вторых, мы разработали вероятностный подход для сбора данных информации о дорожном движении с использованием связи V2I, основанной на механизме скорости смены полосы движения, способном точно обнаруживать дорожные происшествия. Анализ показывает, что предлагаемый метод позволяет более точно оценить дорожное происшествие и может оценить дорожное происшествие с тремя различными плотностями движения.Посредством моделирования предложенный метод позволил получить лучшую оценку дорожно-транспортного происшествия, которая хорошо согласуется с теоретическим происшествием. Кроме того, сравнивая эффективность предложенного метода обнаружения дорожных происшествий, предлагаемый метод превосходит другие методы, обеспечивая наивысшую скорость обнаружения происшествий и наиболее быстрое рассеивание дорожных заторов. По сравнению с другими методами с точки зрения продолжительности инцидента, предлагаемый метод получает наименьшее время для устранения инцидента.Более того, мы дополнительно оценили производительность предложенного метода с помощью хорошо известных методов, таких как Naive Bayes, KNN и SVM с использованием данных трафика I-880. Результаты экспериментов показывают, что предложенный метод имеет лучшие характеристики по сравнению с другими методами.
В будущем мы усовершенствуем предложенную модель, используя методы совместного обучения и поддержки векторных машин (SVM), которые могут обеспечить надежное обнаружение дорожных происшествий. Кроме того, мы будем использовать беспроводную сеть 5G для получения надежной точности данных дорожной информации, которые будут успешно применяться для оценки дорожного происшествия.
Доступность данных
Данные теста производительности, использованные для подтверждения результатов этого исследования, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Благодарности
Эта работа была частично поддержана Национальной программой ключевых исследований и разработок в рамках гранта 2018YFB1600503, частично — Китайским фондом естественных наук в рамках грантов U1564201, 1664258 и 61773184.
Microsoft Word — 08 499 16 января 15 6 декабря 14 нечеткое редактирование корректуры
% PDF-1.5 % 1 0 объект > эндобдж 5 0 obj > эндобдж 2 0 obj > транслировать application / pdf
d> oťsSLbSYLUGu | E1 «abWe [
Многочисленные аварии, вызванные опасными обгонами
9. сен 2021
Рискованные маневры при обгоне являются причиной многих дорожно-транспортных происшествий. Часто эти случаи были связаны с неверными суждениями, небрежностью и безрассудством. Почти треть всех людей, погибших на проселочных дорогах Германии в 2020 году, погибли в авариях с участием встречного транспорта. Специалисты DEKRA напоминают, что при обгоне следует всегда учитывать следующее главное правило: «Если сомневаешься, не рискуй!»
- Высокий риск на проселочных дорогах
- Если у вас есть хотя бы малейшие сомнения, не обгоняйте
- Люди часто недооценивают расстояние, необходимое для обгона
«Если вы начинаете обгон, вы должны знать, что вы можете только сделать обгон. это до тех пор, пока вы можете безопасно избегать любых помех или опасности для других на протяжении всего маневра », — говорит Стефани Риттер, исследователь аварий в DEKRA, ссылаясь на параграф 5 Немецкого дорожного кодекса.Обгоняющие автомобили также должны двигаться намного быстрее, чем обгоняемые, и не должны нарушать ограничение скорости.
Четко ли видно участок дороги?
«Само собой разумеется, что обгонять можно только там, где это разрешено». Более того, чтобы уверенно обгонять, нужно хорошо разбираться в нескольких задачах. «Прежде чем выехать, я должен оглянуться и убедиться, что другой автомобиль не начал меня обгонять, что тогда будет иметь приоритет», — объясняет Риттер.«В то же время я должен внимательно следить за дорогой передо мной и проверять следующее: свободна ли она от встречного транспорта? Могу ли я увидеть всю дорогу? На каких машинах я хочу обгонять? Достаточно ли длинен свободный участок дороги для маневра? И я также должен не забыть указать ».
Люди часто недооценивают расстояние, которое нужно для обгона. «Многие люди не знают, что вам нужно примерно вдвое больше дистанции, чем требуется только для обгона», — объясняет Риттер.«Вы должны знать, что встречный транспорт может появиться в любой момент, что вам нужно держаться на расстоянии от других транспортных средств, и что ограничение скорости на проселочных дорогах составляет 100 км / ч. Чтобы обогнать грузовик, движущийся со скоростью 60 км / ч, вам нужен свободный участок дороги протяженностью почти 600 метров от начала маневра ».
Именно этот факт, наряду с высокой скоростью, делает обгон на проселочных дорогах столь опасным. Рискованные маневры при обгоне являются второй по частоте причиной несчастных случаев со смертельным исходом.«Если у вас есть хотя бы малейшее сомнение, никогда не следует обгонять», — подчеркивает Риттер. «Это применяется без исключения, если повороты или выступ холма ограничивают видимость, или если вы находитесь рядом с перекрестками и перекрестками». Исследователь дорожно-транспортных происшествий также настоятельно не советует прыгать через полосу движения. «Поступая так, вы подвергаете опасности не только себя, но и других. Не стоит совершать опасный для жизни маневр из-за такой небольшой выгоды с точки зрения времени ».
Обгоняемые автомобили не должны увеличивать скорость
При обратном трогании вы должны держаться на достаточном расстоянии от обгоняемого автомобиля.Вы не должны разрезать их или заставлять тормозить. Что касается обгоняемых транспортных средств, они не должны ускоряться и должны позволять обгоняющему транспортному средству вернуться назад. Здесь требуется взаимный учет.
При обгоне сельскохозяйственной техники необходимо соблюдать особую осторожность. Это касается, прежде всего, случаев, когда указатели поворота загрязнены или закрыты механизмами — поэтому они могут быть не видны для следующего транспорта, и поэтому трактор может отключиться «без предупреждения». А иногда на узких дорогах использование сверхшироких или загруженных транспортных средств может означать, что пространство для обгона слишком ограничено, оставляя при этом достаточное расстояние.
Также важно помнить, что вы можете обгонять велосипедистов, мотоциклы и другие одноколейные транспортные средства только в населенных пунктах, оставляя расстояние, требуемое законодательством страны. В Германии минимальное расстояние составляет 1,5 метра в населенных пунктах; вне них он составляет 2 метра. Последний также рекомендуется для населенных пунктов, когда речь идет об обгоне детей на велосипедах. При проезде мимо ожидающих общественных или школьных автобусов необходимо соблюдать минимальное расстояние 2 метра.
Перегрузка трафика и надежность: тенденции и передовые стратегии уменьшения перегрузки: Глава 2
итоговый отчет
2.0 Природа транспортных заторов и надежность: причины, способы их измерения и почему они имеют значение
2.1 ЧТО ТАКОЕ ЗАЗОР?
Заторы относительно легко распознать — дороги заполнены автомобилями, грузовиками и автобусами, тротуары заполнены пешеходами. В определениях термина затор упоминаются такие слова, как «засорение», «препятствие» и «чрезмерная переполненность».«Для любого, кто когда-либо сидел в загруженном транспортном потоке, эти слова должны показаться знакомыми. В сфере транспорта заторы обычно связаны с избытком транспортных средств на участке проезжей части в определенное время, что приводит к более медленным, а иногда и гораздо более медленным скоростям. чем нормальная скорость или скорость «свободного потока». Под перегрузкой часто понимается остановившееся движение или движение с частыми остановками. Остальная часть этой главы посвящена описанию перегрузки и способам ее измерения, а также ее причинам и последствиям.
2.2 ПРИЧИНЫ ЗАГРУЗКИ И НЕДОСТАТОЧНЫХ ПУТЕШЕСТВИЙ
2.2.1 Общие сведения: семь источников перегрузки
Предыдущая работа показала, что скопление является результатом семи основных причин, часто взаимодействующих друг с другом. 5 Эти «семь источников» можно сгруппировать в три широкие категории, как показано ниже:
Категория 1 — События, влияющие на движение
- Дорожные происшествия — это события, которые нарушают нормальный поток движения, обычно из-за физического сопротивления на полосах движения.Такие события, как автомобильные аварии, поломки и мусор на проезжей части дороги, являются наиболее распространенной формой происшествий. Помимо физического блокирования полосы движения, события, происходящие на обочине или обочине дороги, также могут влиять на транспортный поток, отвлекая водителей, что приводит к изменениям в поведении водителей и, в конечном итоге, к ухудшению качества транспортного потока. Даже инциденты за пределами проезжей части (пожар в здании рядом с шоссе) могут считаться дорожными происшествиями, если они влияют на движение по полосам движения.
- Рабочие зоны — Строительные работы на проезжей части, которые приводят к физическим изменениям в окружающей среде шоссе. Эти изменения могут включать уменьшение количества или ширины полос движения, «смены» полос движения, изменение полосы движения, уменьшение или устранение обочин и даже временное перекрытие проезжей части. Задержки, вызванные рабочими зонами, были названы путешественниками одним из самых неприятных условий, с которыми они сталкиваются в поездках.
- Погода — Условия окружающей среды могут привести к изменениям в поведении водителя, которые влияют на транспортный поток.Из-за ограниченной видимости водители обычно снижают скорость и ускоряют движение при наличии осадков, яркого солнечного света на горизонте, тумана или дыма. Мокрая, заснеженная или обледенелая поверхность дороги также приведет к такому же эффекту даже после того, как осадки закончились.
Категория 2 — Спрос на трафик
- Колебания нормального трафика — Ежедневная изменчивость спроса приводит к тому, что в одни дни объемы трафика выше, чем в другие.Изменяющиеся объемы спроса, накладываемые на систему с фиксированной пропускной способностью, также приводят к переменному (то есть ненадежному) времени в пути, даже при отсутствии каких-либо событий Категории 1.
- Особые события — это особый случай колебаний спроса, когда поток трафика в непосредственной близости от события будет радикально отличаться от «типичных» схем. Специальные события иногда вызывают «скачки» спроса на трафик, которые перегружают систему.
Категория 3 — Физические характеристики автомагистрали
- Устройства управления дорожным движением — Периодическое прерывание транспортного потока устройствами управления, такими как железнодорожные переезды и несвоевременные сигналы, также способствуют возникновению заторов и изменчивости времени в пути.
- Физические узкие места («Пропускная способность») — Транспортные инженеры давно изучали и определили физическую пропускную способность дорог — максимальный объем трафика, который может быть обработан на данном участке шоссе. Пропускная способность определяется рядом факторов: количеством и шириной полос и обочин; объединение площадей на развязках; и выравнивание проезжей части (уклоны и кривые). Пункты взимания платы также можно рассматривать как особый случай узких мест, поскольку они ограничивают физический поток трафика.В смеси того, что определяет емкость, есть еще одна особенность — поведение водителя. Исследования показали, что водители, знакомые с постоянно перегруженными дорогами, располагаются ближе друг к другу, чем водители на менее загруженных дорогах. Это приводит к увеличению объема обрабатываемого трафика.
Highlight Box 1 обсуждает, как семь источников перегрузки связаны с характеристиками основного потока трафика, которые создают нарушение трафика. Обычно мы воспринимаем узкое место как физическое ограничение мощности (категория 3 выше).Однако беспорядочные маневры транспортных средств, вызванные событиями, оказывают такое же влияние на транспортный поток, как и ограниченная физическая пропускная способность.
Поскольку эффекты транспортного потока схожи, нарушения движения всех типов можно рассматривать как приводящие к потере пропускной способности шоссе, по крайней мере, временно. В прошлом основной упор при реагировании на пробки был направлен на добавление дополнительных физических возможностей: изменение трассы шоссе, добавление большего количества полос (включая полосы поворота на сигналах) и улучшение областей слияния и переплетения на развязках.Но не менее важно устранить «временную потерю мощности» из других источников.
Выделите вставку 1 — Что вызывает сбои в транспортном потоке? Что заставляет транспортный поток разбиваться на постоянные остановки? Непрофессиональное определение заторов как «слишком много автомобилей, пытающихся одновременно проехать по шоссе», по сути, правильно. Транспортные инженеры формализуют эту идею как способность — способность перемещать транспортные средства мимо определенной точки за определенный промежуток времени.Когда пропускная способность участка шоссе превышена, транспортный поток прерывается, скорость падает, и транспортные средства сбиваются в кучу. Эти действия вызывают резервное копирование трафика позади сбоя. Итак, какие ситуации могут вызвать перегрузку, которая приведет к резервному копированию трафика? По сути, существует три типа поведения потока трафика, которые вызывают нарушение потока трафика:
На все эти нарушения транспортного потока влияет уровень трафика, который пытается использовать проезжую часть. Высокий спрос на использование автомагистралей — например, вызванный особыми событиями — может усугубить проблемы, вызванные перебоями в транспортном потоке. |
2.2.2 Как семь источников вызывают перегрузку
Перегрузка возникает из-за одного — или взаимодействия нескольких — из семи источников в системе автомобильных дорог.Взаимодействие может быть сложным и сильно варьироваться в зависимости от повседневной жизни и от шоссе к шоссе. Проблема в том, что, за исключением физических узких мест, источники перегрузки возникают с ужасающей нерегулярностью — ничто не может быть неизменным изо дня в день! Однажды пассажиры могут столкнуться с низкой интенсивностью движения, отсутствием дорожных происшествий и хорошей погодой; на следующий день движение может быть более интенсивным, чем обычно, может идти дождь и может произойти серьезная авария, которая блокирует полосы движения. Анализ того, как сочетание этих событий приводит к возникновению заторов, был проведен в Вашингтоне, округ Колумбия.C. (Таблица 2.1). Худшие дни дорожного движения в Вашингтоне можно объяснить сочетанием и различных событий.
Другой пример нерегулярности возникновения событий можно увидеть в частоте и продолжительности дорожно-транспортных происшествий. На рисунке 2.1 показано, как дорожно-транспортные происшествия произошли на 14-мильном участке межштатной автомагистрали 405 в Сиэтле, штат Вашингтон, в периоды пиковых поездок в первые четыре месяца 2003 года. В некоторые дни происшествий относительно не было, в то время как в другие случались многочисленные дорожно-транспортные происшествия.Интересно, что каждый день во время пиков на этой трассе происходило как минимум одно дорожное происшествие. Таким образом, хотя одни дни лучше, чем другие, дорожно-транспортные происшествия неизбежны на переполненных городских автострадах.
Другой источник изменчивости — спрос на трафик, который редко бывает одинаковым изо дня в день. На маршрутах, интенсивно используемых для поездок на работу, загруженность в будние дни обычно намного выше, чем в выходные дни. (На маршрутах в рекреационных, туристических или торговых районах загруженность в выходные дни выше.На рис. 2.2 резко показана эта изменчивость автострад Детройта. Это также показывает, что в будние дни есть некоторая изменчивость: четверг и пятница, как правило, являются днями с наибольшей загруженностью в этот период.
Пробки и непостоянство времени в пути, вызванные запланированными специальными мероприятиями, становятся серьезной проблемой для транспортных агентств. В недавнем обзоре государственных департаментов транспорта (DOT), проведенном Американской ассоциацией государственных служащих автомобильных дорог и транспорта и Американским альянсом пользователей автомобильных дорог, особые мероприятия были названы значительными факторами перегруженности некоммерческих пользователей.Эти события могут быть классифицированы как:
- Крупные спортивные мероприятия — Сюда входят спортивные мероприятия в городах (например, бейсбольная лига высшей лиги, профессиональные футбольные матчи) и спортивные соревнования колледжей в относительно небольших университетских городках, особенно по студенческому футболу. Фактически, многие футбольные матчи колледжей посещают 100000 зрителей или более, и связанные с этим заторы в небольших и малых городах (например, Анн-Арбор, Мичиган; Ноксвилл, Теннесси; и Линкольн, Небраска) могут привести к перегрузке местной системы шоссе в дни игр. .Единственная спасительная выгода состоит в том, что обычно в год проводится не более семи домашних игр; тем не менее, в наши дни заторы значительны, что требует тщательного планирования и активного управления транспортным и правоохранительным персоналом.
Таблица 2.1 Факторы, способствующие экстремальной перегрузке
Десять худших дней в Вашингтоне, округ Колумбия. Движение транспорта
Источник: Васудеван, Минакши; Вундерлих, Карл Э., Шах, Вайшали; и Ларкин, Джеймс, Эффективность передовых информационных систем для путешественников (ATIS) в условиях экстремальной загруженности: выводы из Вашингтона, Д.C., Case Study, сборник материалов ITS America, 2004.
События, которые препятствуют транспортному потоку и делают поездки ненадежными, часто происходят в сочетании. На этой диаграмме показано количество дней, в течение которых происходили различные комбинации событий в течение периода исследования. Например, инциденты происходили в течение трех дней: в два из этих дней происходили только инциденты, а в один день инциденты происходили в сочетании с высоким спросом и плохой погодой. Как известно большинству пассажиров, «одни дни хуже, чем другие.«Сложите высокий спрос (скажем, в пятницу перед трехдневным уик-эндом) в сочетании с сильным дождем и аварией с блокировкой полосы движения, и у вас есть все необходимое для серьезных пробок.
Рисунок 2.1 Количество и продолжительность инцидентов сильно различаются от
День в день
I-405 Southbound, Сиэтл, Вашингтон
Примечание. Данные приведены для утренних и дневных пиковых периодов (7: 00-10: 00 и 16: 00-19: 00) за период с 1 января 2003 г. по 30 апреля 2003 г.Дорожные происшествия изо дня в день происходят довольно неравномерно. Кроме того, их продолжительность и количество блокируемых полос довольно непредсказуемо. Такое неустойчивое поведение в значительной степени делает путешествие ненадежным для путешественников.
Рис. 2.2 Уровни трафика существенно меняются в течение недели
Detroit Freeways, 11.03.2001 — 07.04.2001
Примечание. VMT (или «транспортное средство-мили») — это общепринятая мера использования шоссе.Он рассчитывается как количество транспортных средств, использующих систему, умноженное на расстояние, которое они проезжают. Для отображаемого периода времени воскресенье — это самые низкие точки на графике. Путешествие в будние дни может быть более чем на 60 процентов выше, чем в воскресенье. В будние дни тенденция к тому, чтобы ехать по шоссе в конце недели (четверг и пятница), обычна в большинстве городских районов. В то время как поездки на работу относительно стабильны в течение недели, дискреционные поездки возрастают по мере приближения выходных.
- Авто и скачки — Рост популярности NASCAR привел к увеличению скоплений людей вокруг гонок.
- Университет «День переезда» — Несколько DOT указали, что начало осеннего семестра в университетских городках создает всплеск трафика на два-три дня. Это, по-видимому, является проблемой для небольших городов с крупными университетами, где местная сеть автомагистралей не очень хорошо подходит для обработки больших объемов в непиковые периоды.
- Фестивали, государственные ярмарки и крупные концерты — Многие сельские районы спонсируют такие мероприятия, длящиеся один или несколько выходных в течение года.Например, фестиваль поп-музыки Bonaroo в центральном Теннесси собирает около 100 000 человек один уик-энд в год. Эти посетители фестивалей забиваются на автомагистрали, не предназначенные для такого движения, многие приезжают на несколько дней раньше и задерживаются на несколько дней.
- Сезонный шоппинг — Праздничный шоппинг вокруг крупных торговых центров был указан как еще один источник скопления людей, не связанных с работой, особенно в выходные дни между Днем Благодарения и Рождеством.
Как будто картина перегрузки не была достаточно сложной, подумайте дальше, что одни события могут вызывать другие.Например:
- Наличие серьезных заторов может снизить спрос из-за переключения движения на другие автомагистрали или из-за того, что путешественники уезжают позже. Высокий уровень заторов также может привести к увеличению количества дорожно-транспортных происшествий из-за меньшего расстояния между автомобилями и их перегрева в летние месяцы.
- Плохая погода может привести к авариям из-за плохой видимости и скользкого дорожного покрытия.
- Турбулентность движения и отвлечение внимания водителей, вызванные первоначальной аварией, могут привести к другим авариям. 6 Они также могут привести к перегреву, нехватке газа и другим механическим сбоям в результате застревания начала после другого происшествия.
Все это наводит на мысль о довольно сложной модели перегрузки, показанной на рисунках 2.3a и 2.3b. С практической точки зрения, важно вынести из этой модели два понятия: 1) источники перегрузки могут быть тесно взаимосвязаны, и 2) из-за взаимосвязанности можно ожидать значительных выплат, рассматривая источники.То есть, обрабатывая один источник , вы можете уменьшить влияние этого источника на перегрузку и частично повлиять на другие .
Точные причинно-следственные связи между источниками перегрузки еще не известны, но рассмотрим данные, показанные на Рисунке 2.4. На этом рисунке показана взаимосвязь между задержкой (как из-за узких мест, так и из-за инцидентов) и интенсивностью движения. Из этих данных можно сделать несколько наблюдений:
- Для проезжей части с фиксированной физической пропускной способностью движение должно быть достаточным, прежде чем произойдет задержка из-за узкого места или из-за дорожно-транспортного происшествия.Очевидно, что именно здесь происходит задержка из-за узких мест. Однако для дорожных происшествий он показывает, что при низких уровнях загруженности существует достаточная избыточная пропускная способность, чтобы поглотить влияние большинства дорожных происшествий. (Со временем несколько дорожных происшествий заблокируют все полосы движения, что приведет к существенной задержке, но за долгую историю эти эффекты стираются.)
- На уровне интенсивности трафика, когда начинается перегрузка (диапазон отношения AADT 7 к пропускной способности от 8 до 10), связанная с инцидентами перегрузка является существенной частью общей перегрузки.По мере роста трафика на проезжей части с фиксированной пропускной способностью, заторы, связанные с узкими местами, становятся все более доминирующими.
Рисунок 2.3 Анатомия перегрузки
Рисунок 2.3a Часть 1 — Объемы трафика взаимодействуют с физической емкостью для создания «базовой задержки»
= Источник перегрузки
Примечание. Отправной точкой для заторов в большинстве дней является интенсивность движения и физические ограничения на шоссе (узкие места).Трафик меняется изо дня в день в течение года, и особые события могут вызвать скачки трафика в неожиданное время. На рисунке 2.2 показан пример того, как объем трафика меняется даже за такой короткий период, как месяц.
Рисунок 2.3 Анатомия скопления (продолжение)
Рисунок 2.3b Часть 2 — События на дороге уменьшают доступную пропускную способность и добавляют дополнительную задержку в систему
= Источник перегрузки
Примечание. Физическая емкость меняется так же, как трафик в разные периоды времени.Работа светофоров меняет пропускную способность, часто ежеминутно. Когда происходят дорожные происшествия, они также вызывают снижение физической пропускной способности проезжей части. (Дорожные происшествия и рабочие зоны могут «украсть» полосы движения, а плохая погода заставляет водителей больше отвлекаться.) Перегрузка базового уровня, вызванная узкими местами, может привести к увеличению количества дорожно-транспортных происшествий из-за меньшего расстояния между транспортными средствами и их перегрева летом. Наконец, наличие сильных заторов может заставить некоторых водителей менять маршруты или вообще отказываться от поездок.Понимание того, как взаимодействуют все эти факторы, является предметом постоянных исследований.
Рисунок 2.4 Взаимосвязь между инцидентами и задержкой узких мест и интенсивностью трафика
Примечание. Уровень AADT / C является общим показателем «интенсивности» трафика, пытающегося использовать шоссе с фиксированной пропускной способностью. AADT — это среднегодовой ежедневный трафик (транспортных средств в день), а C — двусторонняя пропускная способность проезжей части (транспортных средств в час). Задержка из-за узких мест и дорожных происшествий происходит по-разному: узкие места вызывают задержку в определенных точках, в то время как дорожные происшествия могут происходить в любом месте на участке шоссе.Это причина использования 5- и 10-мильных сегментов для указанной выше задержки дорожного происшествия. Анализ показывает, что по мере роста трафика на проезжей части с фиксированной пропускной способностью задержка дорожного происшествия изначально превышает задержку из-за узкого места. По мере роста трафика задержка из-за узкого места превосходит задержку дорожного происшествия, потому что это происходит довольно регулярно, в то время как дорожные происшествия различаются по возникновению и характеристикам.
Этот анализ также показывает взаимосвязь между источниками задержки, указанными на рисунках 2.3а и 2.3b. Даже без изменений характеристик дорожных происшествий задержка дорожных происшествий растет по мере того, как на проезжую часть добавляется больше трафика. Другими словами, по мере роста уровня трафика на основе фиксированной пропускной способности проезжая часть становится более уязвимой для сбоев, вызванных дорожными происшествиями или любыми другими событиями, влияющими на движение транспорта.
Экспоненциальный рост задержки в связи с возникновением узких мест после начала перегрузки является основной причиной того, почему агентствам так трудно справляться с перегрузкой: как только она начинается, все быстро ухудшается.Введение дополнительного транспортного средства в условиях перегруженности означает не только задержку этого транспортного средства, но и добавление дополнительной задержки к любым другим транспортным средствам, которые присоединяются после него.
- При более высоких базовых уровнях перегрузки перегрузка, связанная с узкими местами, растет все более быстрыми темпами. Исследователи давно отметили, что задержка увеличивается экспоненциально (т. Е. Становится «баллистической») с уровнем трафика на базе фиксированной пропускной способности. Почему это? Как только очередь сформирована и в конце очереди присоединяется дополнительное транспортное средство, вы получаете двойной удар: не только это транспортное средство задерживается, но и очередь становится длиннее, и любые новые транспортные средства, которые присоединяются к ней, также будут отложены к текущему моменту. более длинная очередь.Рост задержки для дорожных происшествий является скорее прямым результатом нерегулярного возникновения дорожных происшествий — они не происходят постоянно, как задержка из-за узких мест.
Тот факт, что задержка, связанная с узким местом и инцидентом, увеличивается с увеличением базового уровня перегрузки, указывает на то, что при увеличении физической емкости перегрузка для обоих источников будет уменьшена. Другими словами, Объекты с большей базовой пропускной способностью менее уязвимы для сбоев: дорожное происшествие, которое блокирует одну полосу движения, оказывает большее влияние на шоссе с двумя полосами движения, чем на шоссе с тремя полосами движения.Эта особенность подчеркивает взаимозависимость упомянутых выше источников. Это также подкрепляет представление о том, что добавление физической емкости является жизнеспособным вариантом для уменьшения перегрузки, особенно когда это делается в сочетании с другими стратегиями.
2.2.3 Надежность времени в пути и почему это важно
Что такое надежность в пути? По самой своей природе характеристики проезжей части являются в то же время постоянными и повторяющимися, но в то же время сильно изменчивыми и непредсказуемыми.Он является последовательным и повторяющимся в том смысле, что периоды пикового использования происходят регулярно и могут быть предсказаны с высокой степенью надежности. (Относительный размер и время «часа пик» хорошо известны в большинстве сообществ.) В то же время он очень изменчив и непредсказуем, поскольку в любой день необычные обстоятельства, такие как сбои, могут резко изменить производительность проезжая часть, влияющая как на скорость движения, так и на объемы пропускной способности.
Путешественники сталкиваются с такими резкими колебаниями производительности, и их ожидание или страх перед ненадежными условиями движения влияет как на их мнение о характеристиках дороги, так и на то, как и когда они решают путешествовать.Например, если известно, что на дороге очень изменчивые условия движения, путешественник, использующий эту дорогу, чтобы успеть на самолет, обычно оставляет много «лишнего» времени, чтобы добраться до аэропорта. Другими словами, «надежность» поездки этого путешественника напрямую связана с изменчивостью маршрута, по которому он или она выбирает.
Становится ясно, что мы больше не можем просто определять перегрузку в терминах «средних» или «типичных» условий. Одна из причин обозначена на рисунке 2.4 — поскольку движение по проезжей части с фиксированной пропускной способностью, автомагистраль становится более восприимчивой к задержкам из-за дорожных происшествий и, фактически, ко всем событиям, влияющим на движение. Поскольку надежность показывает, насколько события влияют на условия дорожного движения, это особенно важно, когда дело доходит до определения операционных стратегий, направленных на контроль воздействия этих событий.
Выделите рамку 2 — Измерение надежности Поскольку надежность определяется тем, как время пробега изменяется во времени, полезно разработать частотные распределения, чтобы увидеть, насколько существует изменчивость.Расчет среднего времени в пути и размера «буфера» — дополнительного времени, необходимого путешественникам для обеспечения своевременного прибытия — помогает нам разработать различные меры надежности. Эти меры включают индекс буфера, время планирования и индекс времени планирования (см. Рисунок 2.5). Все они основаны на одном и том же базовом распределении времени в пути, но описывают надежность несколько по-разному:
Рисунок 2.5 Распределение времени в пути, State Route 520 Seattle, На восток, 16: 00-19: 00. Будние дни (длина 11,5 мили) |
Имея в виду это обсуждение, с практической точки зрения надежность времени в пути можно определить с точки зрения того, как время в пути изменяется во времени (например, от часа к часу, изо дня в день). Пассажиры, которые едут на работу и с работы по загруженным шоссе, хорошо об этом знают. Когда их спросят о том, как они добираются до работы, они скажут что-то вроде: «В хороший день у меня уходит 45 минут, а в плохой — час 15 минут.«
Рисунок 2.6 иллюстрирует этот опыт с данными, полученными с State Route (SR) 520, основного пригородного маршрута в Сиэтле, штат Вашингтон. Если бы на этом 11,5-мильном сегменте не было заторов, время в пути составило бы около 11 1/2 минут; в День Президента так и было. В другие дни среднее время в пути составляло 17,5 минут, или средняя скорость 40 миль в час. Но при наличии событий (дорожно-транспортных происшествий и погоды) это может занять почти 25 минут, или на 37 процентов больше. Пассажиры, которые едут по коридору SR 520, должны учитывать эту непредсказуемую изменчивость, если они хотят прибыть вовремя — среднее значение просто не годится.
Рис. 2.6 Время в пути в будние дни
17: 00–18: 00, State Route 520 Eastbound, Сиэтл, Вашингтон
Другими словами, они должны встроить буфер в свое планирование поездки, чтобы учесть изменчивость. Если они построят буфер, в некоторые дни они прибудут раньше, что не обязательно плохо, но дополнительное время все же вырезается из их рабочего дня. И это время они могли бы использовать для других занятий помимо поездок на работу.
Какое значение имеет обеспечение надежного времени в пути? Повышение надежности времени в пути важно по ряду причин:
- Повышение надежности достигается за счет уменьшения общей изменчивости из-за семи источников перегрузки, в основном влияющих на трафик. Другими словами, стратегии улучшения, нацеленные на надежность, уменьшают задержку из-за событий, влияющих на трафик (например, дорожных происшествий, плохой погоды и рабочих зон).Это дает двойную выгоду: не только сокращается изменчивость, но также сокращается общая задержка из-за заторов , с которыми сталкиваются путешественники.
- Уменьшение общей загруженности экономит время и топливо, а также снижает выбросы транспортных средств.
- Уменьшение заторов на международных пограничных переходах ведет к снижению транспортных расходов и приносит пользу национальной экономике в целом. Кроме того, уменьшение заторов на автомагистралях Соединенных Штатов для грузовых перевозок между Канадой и Мексикой способствует развитию международной торговли.Таким образом, заторы на автомагистралях США имеют большое влияние на эффективность международной торговли .
- Устранение трех основных составляющих ненадежного передвижения — дорожно-транспортных происшествий, плохой погоды и рабочих зон — также ведет к повышению безопасности автомагистралей. Уменьшая продолжительность этих мероприятий, мы сокращаем продолжительность пребывания путешественников в менее безопасных условиях.
- Пассажиры, перевозчики и грузоотправители, все озабочены надежностью времени в пути.Различия во времени в пути могут сильно расстраивать и высоко ценятся обеими группами. Предыдущее исследование 8 показывает, что пассажиры ценят переменную составляющую своего времени в пути от одного до шести раз больше, чем среднее время в пути. А увеличение количества производственных процессов, выполняемых точно в срок (JIT), сделало надежное время в пути чрезвычайно важным. Значительные различия во времени в пути уменьшат выгоды, связанные с меньшим складским пространством и использованием эффективных транспортных сетей в качестве «нового склада».« Таким образом, как в сфере пассажирских, так и в сфере грузовых перевозок, данные свидетельствуют о том, что надежность времени в пути оценивается пользователями со значительной« премией ».
2.2.4 Как путешественники, операторы и планировщики видят надежность
Несмотря на наше простое определение надежности времени в пути как изменение времени в пути на протяжении истории, существуют разные точки зрения:
- Путешественники хотят знать информацию о конкретной поездке, которую они собираются совершить, и о том, как она соотносится с их типичной или ожидаемой поездкой;
- Точно так же операторы хотят знать, как система работает сейчас по отношению к типичным условиям; и
- Планировщики хотят знать, как система работала в прошлом месяце или прошлом году по сравнению с предыдущими периодами времени.
Как мы уже видели, некоторые дни лучше (или хуже), чем другие, с точки зрения загруженности, и есть небольшие отклонения от средних или типичных условий в любой конкретный день. На рис. 2.7 показан этот вариант с точки зрения путешественника и оператора. Показано время в пути по сильно загруженному коридору I 75 в центре Атланты по всем четвергам в 2003 году. Показано среднее время в пути и время в пути 95-го процентиля, а также фактическое время в пути для двух конкретных четвергов.16 января явно был «плохим» днем в этом коридоре, а 4 сентября — «лучше среднего». Как для путешественников, так и для операторов, постоянно обновляемая информация об условиях поездки по сравнению с исходными показателями была бы ценной информацией. Фактически, по крайней мере один центр управления дорожным движением (Houston TRANSTAR) размещает такую информацию на своем веб-сайте в режиме реального времени. 9 Следует отметить, что в настоящее время у нас нет возможности предсказать, что произойдет, — трудная задача, учитывая неопределенность непредсказуемых событий, таких как инциденты или внезапная сильная погода.Мы можем только сравнивать то, что происходит сейчас, с историческими условиями, но в настоящее время исследования по этой теме ведутся.
Тем не менее, возможность с некоторой уверенностью предсказать , какое время в пути будет в ближайшем будущем, представляет большой интерес для операторов и путешественников. Почему это важно? Если у пассажира есть рутинная деятельность, которая должна выполняться каждый день — например, забирать детей из детского сада, — они должны запланировать дополнительное время в пути, чтобы убедиться, что они не опаздывают.То же самое и с местными автотранспортными компаниями, занимающимися вывозом и доставкой грузов. Если снова взглянуть на данные на рис. 2.7, то, если путешественник выезжает из коридора в 17:30, в среднем по четвергам поездка занимает около 12 минут. Но история показала, что чтобы быть в безопасности, они должны планировать около 18 минут (на 50 процентов больше), чтобы иметь лишь небольшой шанс опоздать; они должны встроить буфер . Это не большие цифры, но это короткий коридор (4 мили).Однако разница в процентах велика. Если аналогичные условия существуют на протяжении оставшейся части поездки, дополнительное время начинает быстро накапливаться. При таком простом подходе экстремальное событие может создать большие проблемы для отдельной поездки, но, по крайней мере, мы можем вычислить разумную вероятность прибытия вовремя.
Рис. 2.7 Хороший или плохой день для поездок на работу:
Сравнение текущего времени в пути с историческими условиями
I-75 Южное направление в Центральную Атланту, четверг, 2003 г.
Примечание. Сравнение того, что происходит сейчас на автостраде, с «типичными» (средними) и «экстремальными» (95-й процентиль) условиями дает как операторам, так и путешественникам информацию, которая может привести к действиям.Например, днем 4 сентября путешественники могли видеть, что заторы были меньше, чем обычно, и могли запланировать дополнительные мероприятия. С другой стороны, 16 января был днем интенсивной перегрузки, и по мере ее развития операторы могли публиковать сообщения о переадресации, чтобы попытаться ее контролировать.
Планировщиков больше всего интересует, как все меняется в течение длительного периода времени, хотя вопрос «становится лучше или хуже» также представляет общий интерес. В коридоре I 75 в центральной части Атланты время в пути в дневной пиковый период увеличилось, а надежность снизилась в период с 2001 по 2003 год (Рисунок 2.8). Подобные тенденции в производительности становятся все более распространенными в транспортных агентствах. Как обсуждается в следующем разделе, мониторинг производительности является основным акцентом в операциях и планировании.
Рисунок 2.8 Перегрузка и ненадежные поездки увеличились на
I-75 Южное направление в Центральной Атланте, Джорджия
Четверг, 2001 и 2003 годы
Примечание: сравнивая среднее время в пути в 2001 и 2003 годах (синие линии), можно увидеть, что средний уровень загруженности в этом коридоре увеличился.В то же время надежность времени в пути снизилась, о чем свидетельствует увеличение времени прохождения 95-го процентиля.
2.3 ОТСЛЕЖИВАНИЕ ЗАГРУЗКИ
2.3.1 Зачем нужно отслеживать перегрузку?
Мониторинг перегрузки — это лишь один из нескольких аспектов производительности транспортной системы, который приводит к более эффективным инвестиционным решениям для улучшения транспорта. Безопасность, физическое состояние, качество окружающей среды, экономическое развитие, качество жизни и удовлетворенность клиентов относятся к тем аспектам работы, которые также требуют мониторинга. 10 Перегрузка связана со всеми этими другими категориями, поскольку более высокие уровни перегрузки связаны с их ухудшением.
Помимо улучшения инвестиций, улучшенный мониторинг перегрузки может привести к нескольким положительным результатам:
- Повышенная производительность –Информация из операционных систем может использоваться эксплуатационными агентствами для изменения часов или методов работы с целью улучшения системы. Показатели эффективности могут быть нацелены, например, на до / последствия последних программ или потери производительности из-за перегруженности.
- Улучшенная связь — Показатели эффективности, которые включают время в пути, задержку или другие понятные концепции, могут обеспечить более эффективные способы передачи информации о состоянии системы.
- Обоснование программы — Показатели эффективности и программа сбора данных до / после могут быть очень эффективными при определении эффекта ряда действий по управлению автострадой и артериями. Многие из этих действий нелегко оценить с помощью моделей.
- Улучшения финансирования — В самых последних кампаниях по увеличению финансирования, ценообразованию проектов или повышению гибкости финансирования показатели эффективности играли две ключевые роли.Их можно использовать для демонстрации улучшенных условий или использования имеющихся средств, чтобы показать, что текущие действия агентства уместны и выгодны. Меры и данные также могут быть использованы в обязательствах перед общественностью, чтобы продемонстрировать эффект предложенных программ.
2.3.2 Показатели производительности при перегрузке
Время в пути как основа для оценки эффективности перегрузки
Эффективность системы автомагистралей с точки зрения того, насколько эффективно пользователи могут по ней проезжать, можно описать тремя основными терминами: загруженность, мобильность и доступность.Хотя исследователи имеют разные определения этих терминов, мы сочли полезным дать им следующее определение:
- Перегрузка — Описывает условия проезда на объектах;
- Mobility — Описывает, насколько хорошо пользователи могут выполнять полные поездки ; и
- Доступность — описывает, насколько близко расположены возможностей (например, рабочие места, покупки) с точки зрения возможности доступа пользователя к ним через транспортную систему.
Перегрузка и мобильность очень тесно связаны, и для их мониторинга можно использовать одни и те же показатели и концепции. Доступность — это относительно новая концепция, требующая другого набора показателей. Большинство данных, которые доступны в настоящее время, описывают производительность объекта, а не производительность поездки, хотя появляются новые технологии, которые позволят осуществлять прямой мониторинг всех поездок.
Один из принципов, установленных FHWA для мониторинга перегрузок в рамках своего годового плана работы, заключается в том, что значимые показатели эффективности перегрузки должны основываться на измерении времени в пути.Время в пути легко понять практикующим специалистам и общественности и применимо как для пользователя, так и для точки зрения производительности.
Временные аспекты перегрузки: Измерение загруженности по времени суток и дням недели на транспорте имеет давнюю историю. Относительно новый поворот в этом вопросе — определение «пикового периода» в будний день — несколько часов, а не традиционный пиковый час. Во многих мегаполисах, особенно в крупных, заторы в настоящее время длятся три или более часов каждый будний день утром и вечером.Другими словами, со временем загруженность дорог распространилась на большее количество часов дня, поскольку пассажиры уезжают раньше или позже, чтобы избежать традиционного часа пик. Определение пиковых периодов имеет решающее значение при проведении сравнений. Например, рассмотрим трехчасовой пиковый период. В небольших городах заторы обычно могут длиться всего один час — лучшие условия в оставшиеся два часа «разбавят» показатели. Один из способов обойти это — не устанавливать фиксированный период времени для измерения перегрузки, а скорее определять, как долго существует перегрузка (например,g., процент времени, когда рабочие условия ниже порогового значения.)
Пространственные аспекты скопления: Перегрузка распространяется не только во времени, но и в пространстве. Очереди из-за физических узких мест и крупных событий, влияющих на движение транспорта (например, дорожных происшествий), могут растягиваться на многие километры. Меры по измерению заторов должны учитывать это, отслеживая заторы на объектах или коридорах, а не только на коротких участках шоссе.
В таблице 2.2 представлена небольшая выборка показателей (показателей) производительности при перегрузке, которые могут использоваться агентствами для отслеживания тенденций.
| Транспортные средства-мили Грузовик — миль пути Человеко-мили путешествия | Транспортные мили — это количество транспортных средств в системе, умноженное на длину шоссе, по которому они проезжают. Путешествие человеко-миль используется для поправки на тот факт, что на некоторых автомобилях перевозится больше, чем водитель. |
| Средняя скорость движения | Средняя скорость транспортных средств, измеренная между двумя точками. |
| Время в пути | Время, необходимое транспортным средствам для перемещения между двумя точками. И время в пути, и средняя скорость движения являются хорошими показателями для конкретных поездок или в пределах коридора. |
| Количество и процент поездок со временем в пути> (1.5 * среднее время в пути) Количество и процент поездок со временем в пути> (2,0 * среднее время в пути) | Пороговые значения в 1,5 и 2,0 раза выше среднего могут быть адаптированы к местным условиям; также могут быть определены дополнительные пороги. |
| Индекс времени в пути | Отношение фактического времени в пути к идеальному (без газа) времени в пути. Условиями свободного потока на автострадах считается время проезда со скоростью 60 миль в час. |
| Общая задержка (автотранспортные часы и человеко-часы) Узкое место («повторяющиеся») Задержка (автотранспортные часы) Задержка рабочей зоны (транспортное средство-час) Задержка по погодным условиям (транспортное средство-час) Задержка съезда (транспортное средство-часы и человеко-часы; при наличии рампы) Задержка на человека Задержка на автомобиль | Задержка — это количество часов, проведенных в транспортном потоке сверх того, которое обычно имеет место, если бы поездка могла осуществляться с идеальной скоростью. Для определения задержки по «источнику скопления» требуется подробная информация о характере и масштабах событий (происшествиях, погодных условиях и рабочих зонах), а также об измеренных условиях движения. Задержка на человека и задержка на транспортное средство требует знания того, сколько транспортных средств и людей используют проезжую часть. |
| Процент VMT со средней скоростью <45 миль в час Процент VMT со средней скоростью <30 миль в час | VMT — это транспортное средство в милях пути, обычная мера использования шоссе. |
| Процент дня со средней скоростью <45 миль в час Процент дня со средней скоростью <30 миль в час | Эти меры фиксируют продолжительность перегрузки. |
| Время планирования (рассчитано для фактического времени в пути и индекса времени в пути) | 95-й процентиль распределения — это число, выше которого остается только 5 процентов от общего распределения.То есть только 5 процентов наблюдений превышают 95-й процентиль. Для пассажиров это означает, что на 19 из 20 рабочих дней в месяц их поездки займут не больше времени планирования. |
| Индекс времени планирования (рассчитывается для фактического времени в пути и индекса времени в пути) | Отношение 95-го процентиля («Время планирования») к «идеальному» или «свободному» времени в пути (время в пути, которое имеет место при очень слабом движении, около 60 миль в час на большинстве автострад). |
| Индекс буфера | Представляет дополнительное время (буфер), которое большинство путешественников добавляют к своему среднему времени в пути при планировании поездок. |
Для определенного участка дороги и периода времени: буферный индекс (%) = | 95-й процентиль время в пути (минуты) — среднее время в пути (минуты) среднее время в пути (минуты) |
2.3.3 Методы, используемые для разработки показателей производительности при перегрузке
Рисунок 2.9 показано, как можно рассчитать время в пути на основе данных, аналитических методов или их комбинации. Очевидно, что лучшие методы основаны на прямом измерении времени в пути либо с помощью зондового транспорта, либо более традиционного метода «плавающего автомобиля», при котором сборщики данных проезжают по определенным маршрутам. Однако у обоих из них есть недостатки: зондовые аппараты в настоящее время широко не используются, а метод плавучего автомобиля страдает от чрезвычайно малых образцов, поскольку он дорог и требует много времени. Кроме того, поскольку для многих показателей производительности также требуются объемы трафика, для разработки полного набора показателей производительности требуются дополнительные усилия по сбору данных.Использование дорожного оборудования ITS решает эти проблемы, но это оборудование не измеряет время в пути напрямую; Спотовые скорости ITS необходимо сначала пересчитать во время в пути. (В Приложении приводится описание оборудования, используемого для сбора этих данных.) В других косвенных методах оценки времени в пути в качестве основы используются объемы перевозок, либо те, которые измеряются напрямую, либо разрабатываются с помощью моделей прогнозирования спроса на поездки. Ниже приведены два примера того, как FHWA увеличивает время в пути с помощью этих методов.
Рисунок 2.9. Измерение времени прохождения — основа для измерения перегрузки
Ежемесячный отчет о городских заторах
С 2000 года FHWA собирает данные об объеме и скорости из центров управления городским движением. Эти данные в основном получены от дорожного оборудования ITS, хотя в некоторых городах изучается возможность использования транспортных средств-зондов для определения времени в пути. Данные из 29 городов в настоящее время ежегодно собираются из участвующих центров управления дорожным движением.Некоторые из этих городов теперь предоставляют данные на ежемесячной основе, и эти ежемесячные данные используются для ежемесячного отслеживания общегородских тенденций. На рис. 2.10 показан пример представления этих данных. По мере увеличения числа участвующих городов — и по мере увеличения охвата наблюдением в существующих городах — эти данные позволят FHWA отслеживать ежемесячные изменения в загруженности. (В разделе 3.0 представлен дополнительный анализ данных, используемых в этой программе.)
Рисунок 2.10 Пример отчета о недавно разработанной городской загруженности Используется FHWA для отслеживания ежемесячных изменений в перегрузке
Инициатива по измерению эффективности грузовых перевозок
Отслеживание заторов в городах зависит от наличия интенсивной системы наблюдения для сбора данных о скорости движения транспортных средств (с помощью датчиков проезжей части) или времени в пути (с использованием транспортных средств с метками дорожных сборов) в близко расположенных точках проезжей части.За пределами крупных мегаполисов такое наблюдение не ведется. Чтобы дополнить меры по измерению загруженности в городах и получить лучшее представление об общей производительности системы, FHWA разрабатывает систему для отслеживания движения грузовиков по междугородним коридорам, по которым перевозятся значительные объемы грузов. FHWA сотрудничает с Американским научно-исследовательским институтом транспорта и транспортной отраслью, чтобы использовать существующие спутниковые системы, которые отслеживают движение грузовиков в целях управления грузоперевозками и автопарком для поддержки измерения производительности транспортных систем.Кроме того, FHWA изучает возможность использования аналогичных методов для измерения задержек на основных международных пограничных переходах. На рисунке 2.11 показан пример того, как эта система была применена для расчета времени в пути на 10-мильных участках межгосударственной автомагистрали 5.
Рис. 2.11 Средняя скорость движения грузовых автомобилей по межштатной автомагистрали 5: 10-мильные участки
Апрель-июнь 2004 г., 15: 00-19: 00.
2.4 ПОСЛЕДСТВИЯ ЗАГРЯЗНЕНИЯ
Национальные местные, региональные и национальные транспортные системы играют жизненно важную роль в обеспечении доступа к товарам и услугам, которые поддерживают и развивают экономику нашей страны.Планировщики и эксперты по экономическому развитию признают, что перегруженность — это проблема экономического развития, поскольку она препятствует привлечению и расширению бизнеса, а также снижает качество жизни жителей.
Пользователи транспортной системы разработали стратегии решения проблемы повышенной загруженности и снижения надежности. В краткосрочной перспективе мы можем изменить способ или время путешествия. В долгосрочной перспективе заторы могут повлиять на наши решения о том, где мы живем и работаем. То же самое и с бизнесом.Эти типы корректировок могут уменьшить влияние заторов на нас, но они все еще не устраняют полностью экономические последствия для региона.
Столкновения с грузовиком. Перегрузка означает более длительное время в пути и менее надежные сроки получения и доставки для операторов грузовых автомобилей. Чтобы компенсировать это, автомобильные перевозчики обычно добавляют автомобили и водителей и продлевают часы работы, в конечном итоге перекладывая дополнительные расходы на грузоотправителей и потребителей. Исследования отрасли грузоперевозок показали, что грузоотправители и перевозчики оценивают время перевозки в диапазоне от 25 до 200 долларов в час, в зависимости от перевозимого продукта.Стоимость непредвиденной задержки может добавить еще 20% к 250%. 11
Воздействие на бизнес. Перегрузка увеличивает затраты на доставку товаров и услуг из-за увеличения времени в пути и операционных расходов, понесенных транспортной системой. Менее очевидно, могут быть другие расходы, например:
- Расходы на то, чтобы оставаться открытым в течение более длительного времени для обработки просроченных поставок;
- Штрафы или упущенная выгода, связанная с несоблюдением графика;
- Стоимость порчи срочных поставок;
- Затраты на поддержание большего количества запасов для покрытия ненадежности поставок;
- Затраты на возврат к менее эффективным процессам планирования производства; и
- Дополнительные расходы, понесенные из-за доступа к сокращенным рынкам рабочей силы, клиентов и зон доставки.
Деловая ценность временной задержки и доступа к рынку действуют вместе, чтобы влиять на прибыльность и потенциальный доход, связанный с ведением бизнеса в штате или регионе. Когда одна область больше других подвержена заторам, относительная конкурентоспособность этих областей также меняется. В результате предприятия имеют тенденцию к стагнации или уходу из областей с высокими эксплуатационными расходами и ограниченными рынками, в то время как они размещаются и расширяются в областях с более низкими эксплуатационными расходами и более широкими рыночными связями.Масштабы этих изменений варьируются в зависимости от отрасли в зависимости от того, насколько сильно общие операционные расходы отрасли зависят от транспортных факторов. Факты, по-видимому, указывают на то, что региональные экономики, поддерживаемые кластерами или «агломерациями» многих взаимосвязанных фирм, находятся в лучшем положении, чтобы противостоять более высоким операционным расходам из-за заторов, чем экономики, которые этого не делают.
Воздействие на домохозяйство. У домашних хозяйств есть и финансовые бюджеты, и так называемые «бюджеты времени», на которые влияет перегрузка.Домохозяйства планируют свою деятельность в соответствии с имеющимся бюджетом времени, а также в соответствии со своими финансовыми бюджетами. Поскольку расходы на эксплуатацию и техническое обслуживание транспортных средств увеличиваются с увеличением загруженности, бюджет на некоторые виды деятельности или расходы сокращаются. Воспринимаемое «качество жизни» района также ухудшается, когда снижается безопасность, надежность и удобство транспортной системы.
Региональные воздействия. Эти воздействия на домохозяйства и предприятия оказывают влияние на региональную экономику.Снижение ценовой конкурентоспособности и возможностей роста рынка равносильно снижению способности удерживать, расти и привлекать предприятия. Кроме того, перераспределение деловой и бытовой деятельности в отдаленные районы и прямая задержка поездок, которые не изменяются или иным образом не изменяются, приводят к снижению качества воздуха, увеличению требований к инвестициям в общественную инфраструктуру и потенциальному воздействию на факторы здоровья и качества жизни. . 12
- Обеспечение системы автомобильных дорог с надежным временем в пути, область 3 будущего стратегического плана исследований автомобильных дорог , Совет по исследованиям в области транспорта, сентябрь 2003 г., http: // www4.trb.org/ trb / newshrp.nsf / web / progress_reports? OpenDocument.
- Это явление иногда называют «вторичными авариями» — авариями, которые не произошли бы, если бы не произошла более ранняя авария в непосредственной близости. Возможные причины вторичных ДТП включают быстрорастущие очереди, вызванные первым ДТП, и резкие удары автомобилистов.
- Средний годовой ежедневный трафик — количество трафика, которое движется в среднем за день. Вычисляется как простое среднее значение всего 24-часового трафика в течение года.Отношение AADT-емкости к емкости аналогично соотношению объема к емкости, используемому во многих транспортных анализах, за исключением того, что в первом случае используется общий 24-часовой трафик, а во втором — почасовой.
- Коэн, Гарри и Саутворт, Фрэнк, Об измерении и оценке изменчивости времени в пути из-за происшествий на автострадах , Журнал транспортной статистики , том 2, номер 2, декабрь 1999 г., http://www.bts .gov / jts / V2N2 / vol2_n2_toc.html.
- http: // traffic.houstontranstar.org/layers/.
- Более подробную информацию о мониторинге всесторонней работы транспортной системы можно найти в: Руководство по планированию перевозок на основе результатов , Отчет NCHRP 446, Транспортный исследовательский совет, Вашингтон, округ Колумбия, 2000.
- Федеральное управление шоссейных дорог, Грузовые перевозки: развитие и экономика ; https://ops.fhwa.dot.gov/freight/freight_analysis/improve_econ/.
- Вайсброд, Глен, Вэри, Дон и Трейз, Джордж, Экономические последствия перегрузки , Отчет NCHRP 463, Совет по исследованиям в области транспорта, 2001.
К началу
Предыдущая | Содержание | Следующий
Advent ADVBSD30 Система слепых зон на основе радара с контролем скорости, а также предупреждением о перекрестном движении и обгоне: Электроника
В настоящее время недоступен.
Мы не знаем, когда и появится ли этот товар в наличии.
- Убедитесь, что это подходит введя номер вашей модели.
- Предупреждение об обгоне — предупреждает, когда экипированный автомобиль проезжает мимо другого автомобиля
- Выбираемая активация скорости слепой зоны, 15 миль в час или постоянно
- Стандартные предупреждения о слепых зонах при вождении отображаются, когда другие автомобили, люди или объекты входят в слепую зону автомобиля.
- Оснащен системой заднего поперечного движения, которая предупреждает водителя о приближающихся транспортных средствах слева или справа при движении задним ходом
- Радиолокационные датчики слепых зон, расположенные за бампером, для упрощения профессиональной установки