обзор, плюсы и минусы, применение
В этом обзоре вы прочитаете о роборуках различных типов — по области применения, по внутреннему устройству и принципу работы, по характеристикам; узнаете о том, какую пользу они приносят и что могут; прочитаете о примерах применения.
Что такое роботизированная рука
Источник: http://www.cncrobotics.co.uk/
Роботизированная рука — это тип механической руки, обычно программируемой, с функциями, аналогичными человеческой руке. Рука может быть как самостоятельным механизмом, так и частью более сложного робота. Сегменты манипулятора имеют соединения, позволяющие совершать вращательные или поступательные движения. Роботизированная рука заканчивается либо захватным механизмом, либо каким-то рабочим инструментом.
Классификация роботизированных рук
По принципиальному устройству
 kuka.com/
kuka.com/Картезианские (декартовы, линейные) манипуляторы – самые простые из всех стационарных роботов. Типичные декартовы роботы имеют 3 линейные оси свободы, которые перпендикулярно ориентированы друг к другу, что обеспечивает рабочую область в форме прямоугольной коробки. Из-за их относительной простоты, по сравнению с другими типами роботов, декартовы роботы дешевле, чем их аналоги. Из-за своей жесткой конструкции этот тип роботов имеет хороший уровень точности и повторяемости. Например, трехосевой декартовый робот KUKA RL16 имеет повторяемость +/- 0,1 мм.
SCARA-манипуляторы обычно имеют несколько параллельно соединенных рычагов, главным образом цилиндрической конструкции, которые обеспечивают позиционирование в одной выбранной плоскости. Из-за возможной деформации при полном вылете рычага, как правило, не обладают высокой грузоподъемностью, но могут похвастать хорошей скоростью и точностью.
Источник: https://www.logismarket.es
Роботизированные руки шарнирной конструкции имеют поворотные соединения, число которых может варьироваться от двух до 10 или более. Манипуляторы такого типа монтируются на вращающемся основании. Сегменты руки соединены поворотными шарнирами. Каждое соединение называется осью и обеспечивает дополнительную степень свободы. Промышленные роботы обычно имеют четыре или шесть осей. Несмотря на более сложную конструкцию, на сегодня это одни из самых универсальных, совершенных и распространенных роботизированных рук, имеющие грузоподъемность от нескольких килограмм до 1,3 тонны. В линейном ряде KUKA широко представлены шарнирные роботы — от высокоточного KUKA KR 3 AGILUS с пакетом ready2_fasten_micro до супертяжеловеса KR-1000 Titan.
Источник: https://www. wevolver.com
wevolver.com
Антропоморфные роботизированные руки – разновидность шарнирных роботов, имеющих антропоморфные захваты.
Источник: https://roboticsandautomationnews.com
Коллаборативные роботизированные руки – разновидность шарнирных роботов, обладающих интеллектуальными технологиями управления и высокоточными датчиками, для облегчения взаимодействия с человеком и повышения уровня безопасности. KUKA предлагает клиентам коллаборативных роботов KUKA LBR iisy и KUKA LBR iiwa, которые могут быть быстро установлены в любом месте и для любой цели, соответствующей вашим производственным задачам.
Источник: https://phys.org
По полезной нагрузке
Источник: kuka. com
com
Роборуки условно разделяются по полезной нагрузке — по весу объектов, которыми они могут манипулировать. Во многих применениях компактные размеры важнее грузоподъемности, потому производители предлагают широкий выбор по этому критерию:
По области применения
Источник: https://www.kuka.com/en-us/products/production-systems/systems/karosseriebau
Роборуки разделяются по области применения, т.к. помимо универсальных роботизированных рук существуют узкоспециализированные, приспособленные к определенным манипуляциям:
- Автомобильная промышленность;
- Электротехника и электроника;
- Металлообработка, машиностроение;
- Химическая промышленность;
- Медицина и фармацевтика;
- Продовольствие и сельское хозяйство;
- Образование;
- Иные области.
Захватные устройства и инструменты для роботизированных рук
Источник: https://www. goudsmitmagnets.com
goudsmitmagnets.com
Роботы-манипуляторы оснащаются различными оконечными устройствами, от простейших — пневматических или электромагнитных, удерживающих деталь вакуумом или магнитным полем, до сложных роборук с электромеханическим или гидравлическим приводом, а также всевозможных специальных инструментов — закручивающих, сварочных, режущих и т.д.
Инструменты роботов разделяются по разным принципам.
По принципу действия:
- механические;
- магнитные;
- вакуумные;
- с эластичными камерами, деформирующимися под действием нагнетаемого внутрь воздуха или жидкости.
По характеру базирования:
- центрирующие;
- базирующие;
- перебазирующие..
По характеру крепления:
- несменяемые;
- сменные;
- быстросменные;
- с автоматической сменой.


По виду управления:
- неуправляемые;
- командные;
- жестко программируемые;
- адаптивные.
По типу губок:
- жесткие;
- регулируемые;
- гибкие;
- пружинящие.
По типу привода:
- пружинные;
- пневматические;
- гидравлические;
- электромеханические.
Как выбрать роботизированную руку
Источник: https://asia.nikkei.com
При выборе робототехники необходимо точно понимать, какие задачи будет выполнять робот. Это основной критерий при выборе типа, размера и возможностей робота, которого вы хотите купить. В зависимости от этого можно определиться с прочими критериями.
Полезная нагрузка
Источник: https://www. sooyeerobot.com
sooyeerobot.com
Полезная нагрузка — это максимальная нагрузка, которую робот может перемещать в рабочем пространстве. Если вы хотите перенести деталь с одного станка на другой, вам необходимо включить вес детали и вес захвата робота в полезную нагрузку.
Количество осей
Количество осей у робота также называют степенями свободы. Если у вас простые задачи, такие как захват и перемещение детали с одного конвейера на другой, достаточно простого 4-осевого робота. Однако, если вашему роботу предстоит действовать в небольшом рабочем пространстве и его рука должна иметь большую подвижность, то робот с 6 или 7 осями будет лучшим вариантом. Стоит заметить, что наличие у робота большего, чем надо под конкретную задачу, количества степеней свободы — преимущество, позволяющее перепрофилировать его и использовать в большем количестве задач.
Источник: http://www.openrobots.org
Рабочий диапазон
Источник: https://www. sooyeerobot.com
sooyeerobot.com
При подборе обрудования необходимо учитывать — на какое максимальное расстояние должен дотягиваться робот для выполнения поставленных задач. Максимальный вертикальный вылет робота измеряется от самой низкой точки, которую робот может достичь, до максимальной высоты. Максимальный горизонтальный вылет — это расстояние от центра основания робота до самой дальней точки, которую манипулятор может достичь горизонтально. Обратите также внимание на рабочий угловой диапазон, выраженный в градусах.
Повторяемость и точность
Источник: https://www.youtube.com
Повторяемость и точность – способность робота достигать одинакового положения каждый раз, когда он выполняет одну и ту же процедуру. Например, если ваш робот необходим для создания электронной печатной платы, вам может понадобиться робот с высокой степенью повторяемости и точности. Если ваша задача довольно грубая, такая как укладка паллет, то нет смысла переплачивать за высокую точность.
Скорость
Как такового, единого параметра «скорости» применительно к роботам не существует. В зависимости от задачи, скорость может быть линейной, угловой, выраженной в единицах повторяемых действий за период времени и тому подобных величинах.
Масса
Источник: https://www.kuka.com
Масса робота является важным фактором при разработке роботизированной ячейки. Если промышленный робот должен сидеть на специальном основании или на рельсе, нужно знать его вес, чтобы спроектировать соответствующую опору. Если предполагается перемещение роботом тяжестей — надо прибавить к этой величине максимальный вес перемещаемого объекта.
Наличие тормозов
Источник: http://www.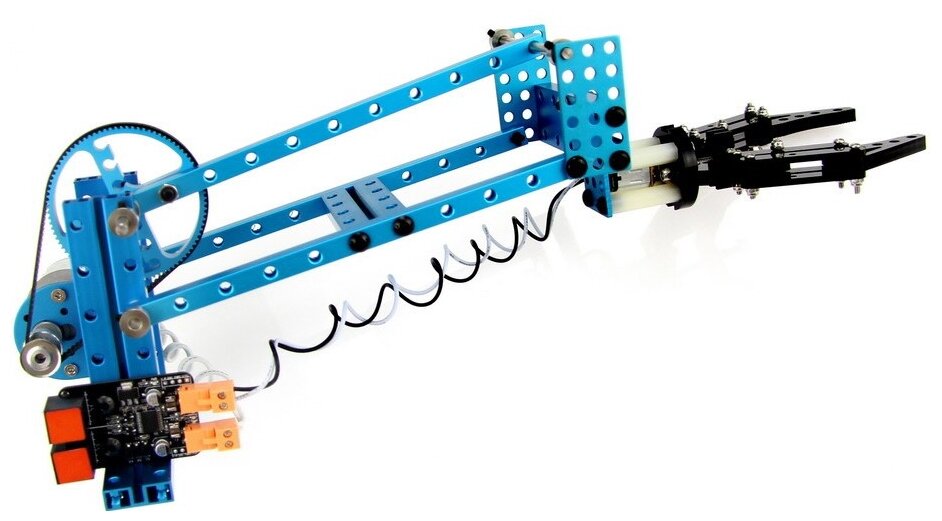 robostav.cz
robostav.cz
В основном, каждый производитель роботов предоставляет информацию о тормозной системе своего робота. У некоторых роботов есть тормоза по всем осям, а у других нет. Чтобы иметь точное и повторяемое положение в рабочей области, вам нужно иметь достаточное количество тормозов.
Крутящий момент и инерционность
Для высокоточных применений производителем может быть указана инерционность определенных сегментов руки. Если ваш маневр требует определенного крутящего момента для правильного выполнения задания, вам необходимо проверить, является ли максимальный крутящий момент, применимый к оси, достаточным. Если предельный крутящий момент на оси будет превышен – робот выключится из-за перегрузки.
Защита
Источник: https://www.kuka.com
В зависимости от условий работы, оборудование должно отвечать определенным стандартам защиты от внешних воздействий по таким параметрам, как защищенность и безопасность. В описаниях и технической документации степень защищенности указывается кодом IP (International Protection Marking — международная защитная маркировка, стандарты защищенности корпусов от проникновения жидких и твердых веществ внутрь).
В описаниях и технической документации степень защищенности указывается кодом IP (International Protection Marking — международная защитная маркировка, стандарты защищенности корпусов от проникновения жидких и твердых веществ внутрь).
Маркировка имеет вид IP-XX, где первая X означает защиту от посторонних предметов (от частей тела человека до частиц пыли — от 1 до 6), вторая — защиту от проникновения воды при разной длительности воздействия и давлении (от 1 до 9).
Если робот работает с продуктами питания, лабораторными или медицинскими инструментами, в легко воспламеняющихся или агрессивных средах — вам потребуется устройство соответствующее специальным отраслевым стандартам.
Кейсы применения
Строительство из дерева, BEC и ICD
Источник: https://www.kuka.com/en-sg
Одним из направлений деятельности Института цифрового проектирования и строительства в Университете Штутгарта является роботизированное производство в архитектуре. В сотрудничестве с BEC GmbH, ICD разработал инновационный легкий деревянный павильон, который может быть построен только с помощью роботов.
В сотрудничестве с BEC GmbH, ICD разработал инновационный легкий деревянный павильон, который может быть построен только с помощью роботов.
Источник: https://www.kuka.com/
При сборке конструкции использовались: двухосный позиционер KUKA DKP-400 и два робота KUKA KR 500 FORTEC. Процесс сборки был следующим:
- Робот 1 устанавливает основание на двухосный позиционер KUKA DKP-400;
- Робот 2 наносит клей на деревянную панель;
- Робот 1 прикрепляет к ней несущую балку;
- Робот 2 прибивает балку на место деревянными гвоздями;
- Робот 1 приклеивает дополнительную панель к клею, нанесенному на балку роботом 2;
- Панель крышки также фиксируется гвоздями;
- Как только клей застынет, робот снова помещает собранную конструкцию на DKP-400;
- Робот 2 точно фрезерует угловые контуры и соединения;
- Робот 1 монтирует полученную часть конструкции.
Источник: https://www.kuka.com/
«Эта легкая конструкция не имеет аналогов в мире. Без роботизированного производства её создание было бы невозможно», — говорит Ханс Якоб Вагнер, научный сотрудник ICD.
«Робот склеивает деревянные панели быстро и точно. Еще одно преимущество: при фрезеровании робот делает допуск не более 0,3 мм.», — объясняет Матиас Бак, управляющий директор BEC GmbH.
Многоцелевые мобильные роботы, LMZ
Источник: https://www.kuka.com/
Компания Lenkering Montage und Zerspanungstechnik GmbH (LMZ) специализируется на производстве машин специального назначения, работающих по разным технологиям. В своей работе компания использует роботизированные комплексы на базе KR 6 R900 из серии KUKA AGILUS, установленные на мобильной платформе. Роботизированная рука KUKA AGILUS имеет максимальную повторяемость и высочайшую точность, обладает способностью эффективно работать в ограниченном пространстве. Во время работы, из соображений безопасности, вокруг робота устанавливается легкое защитное ограждение.
Роботизированная рука KUKA AGILUS имеет максимальную повторяемость и высочайшую точность, обладает способностью эффективно работать в ограниченном пространстве. Во время работы, из соображений безопасности, вокруг робота устанавливается легкое защитное ограждение.
«Мобильное использование роботов в различных задачах сокращает время простоя, что приводит к очень быстрому возврату инвестиций», — объясняет Деннис Ленкеринг, управляющий директор LMZ.
Источник: https://www.kuka.com/
Автоматизация сборочного производства, BMW
Источник: https://www.press.bmwgroup.com
Завод BMW в Дингольфинге. В прошлом работникам приходилось самостоятельно поднимать тяжелые конические шестерни для передних мостов, но теперь они работают рука об руку со своим чувствительным коллегой, роботом KUKA LBR iiwa.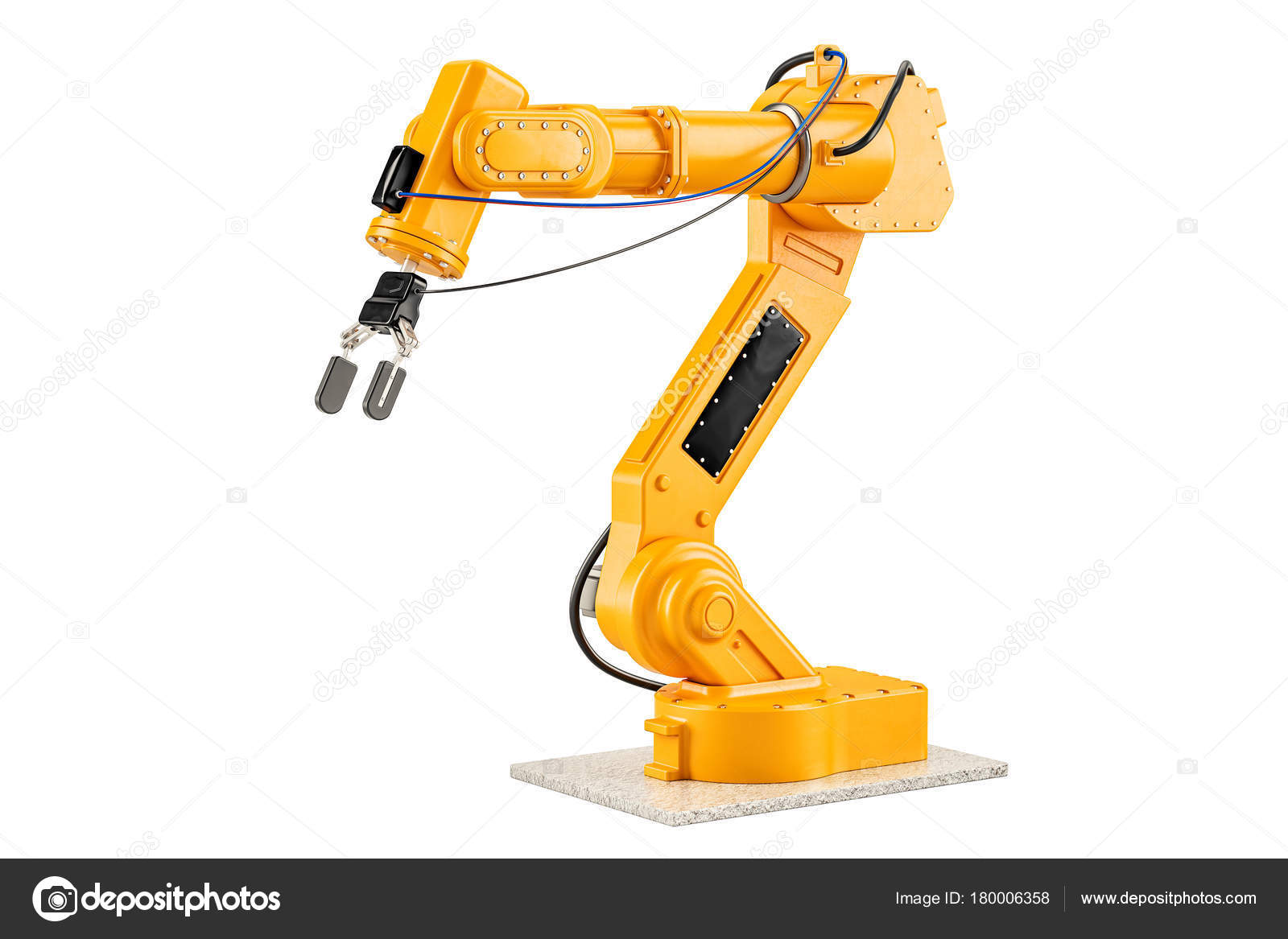 Робот настолько безопасен, что позволяет использовать его в ограниченном пространстве и совершенно без защитных ограждений.
Робот настолько безопасен, что позволяет использовать его в ограниченном пространстве и совершенно без защитных ограждений.
Кристиан Дункерн, руководитель департамента производства, планирования, инструментальной и заводской инженерии в BMW Group:
«Новые технологии открыли для BMW Group возможности для дальнейшего развития производственной системы на многих уровнях. Более, чем когда-либо прежде, люди формируют свои рабочие места и могут заниматься еще более сложными процессами в автомобильном производстве».
Blount Memorial Hospital, Maryville, Теннесси, “Artis zeego”
Источник: https://www.kuka.com
Современная роботизированная система ангиографии «Artis Zeego» от Siemens Healthcare, созданная на базе роботизированной руки KUKA, охватывает широкий спектр методов лечения путем сложных катетерных вмешательств, проводимых в гибридной операционной.
Источник: https://www.kuka.com
Наклон и высоту стола можно регулировать, чтобы поддерживать гемодинамику пациента и обеспечить лечащему врачу или хирургу оптимальный доступ в операционную зону. Это является особым преимуществом при длительных вмешательствах, в процессе которых хирург должен носить тяжелый свинцовый фартук.
Источник: https://www.kuka.com
“Если ты не видишь проблемы, то не можешь её вылечить.С новой роботизированной операционной мы можем вращать и двигать операционное поле во всех измерениях, чтобы быть полностью уверенными в точности своих действий”, — говорит доктор Даниэл Ким, сосудистый хирург.
Студия Babelsberg, KUKA KR QUANTEC
Источник: https://www.kuka.com
Фрезерный робот KUKA KR 210 R3100 QUANTEC вырезает скульптуры из твердой пены в Art Department Studio Babelsberg GmbH. Робот самостоятельно выполняет все необходимые действия. Это самый мощный и точный робот в серии KR QUANTEC. Помимо высокой точности, еще одним аргументом в пользу этой модели является дальность действия — более трех метров. Это необходимо, так как заготовки из твердого пенопласта имеет размеры три на три метра.
Робот самостоятельно выполняет все необходимые действия. Это самый мощный и точный робот в серии KR QUANTEC. Помимо высокой точности, еще одним аргументом в пользу этой модели является дальность действия — более трех метров. Это необходимо, так как заготовки из твердого пенопласта имеет размеры три на три метра.
Источник: https://www.kuka.com
“Благодаря высокой степени точности фрезерного робота KUKA, скульптура будет изготовлена в идеальном соответствии с цифровым чертежом”,
— говорит Себастьян Фойгт, руководитель 3D-лаборатории в художественном отделе Studio Babelsberg GmbH.
Рекомендуемое оборудование
Hanwha — коллаборативный робот
Источник: https://www. hycobot.com
hycobot.com
Коллаборативный робот, которого, благодаря модульной конструкции, сможет собрать даже школьник. Работать с ним так же просто, как использовать смартфон. При желании, оператор может вручную переместить робота в нужное положение и позволить ему запомнить новое движение. Такая функция прямого обучения позволяет даже неопытным операторам заставить робота выполнять задание. Один блок управления может управлять двумя роботами одновременно, что снижает первоначальные затраты. Модуль ввода-вывода и гнездо EtherCAT, расположенные на корпусе робота, позволяют легко подключать различные периферийные устройства, такие как захват, оптический датчик и другие.
KUKA KR 10 R900 SIXX (KR AGILUS)
Источник: https://youtu. be
be
Робот Kuka KR 10 R900 SIXX – многофункциональная модель, которая предназначена для измерения и тестирования, обработки поверхностей, сборки и скрепления, обслуживания других станков, а также для переноски различных предметов и паллетирования. Манипулятор оснащен системой распознавания нового поколения. Это компактный 6-ти осевой робот, который может быть закреплен практически на любой поверхности, в том числе на потолке или стене. Дальность действия робота — до 90 см (1101 мм для модели KUKA KR 10 R1100 FIVVE), а грузоподъемность до 10 кг, при собственном весе – 54 кг.
Особенности модели KR 10 R900 SIXX:
- компактные размеры, подходит для оснащения даже небольшого рабочего места;
- простота в установке и обслуживании;
- специализированное ПО, разработанное для этой серии манипуляторов — KR C4 compact;
- широкая область применения;
- простота в установке и обслуживании;
- специализированное ПО;
- высокая скорость работы;
- степень защиты IP 54.

KUKA KR 16-3s
Источник: https://top3dshop.ru
Робот Kuka KR 16-3 S – скоростная модель для измерения и тестирования, обработки поверхностей, сборки и скрепления, обслуживания других станков, а также для переноски различных предметов и паллетирования. Манипулятор оснащен системой распознавания нового поколения. Это 6-ти осевой робот, который может быть закреплен практически на любой поверхности, в том числе на потолке или полу. Дальность действия манипулятора – 1611 мм, грузоподъемность до 16 кг, при собственном весе 235 кг.
Особенности модели KR 16-3 S:
- большой радиус действия;
- широкая область применения;
- простота в установке и обслуживании;
- возможность интеграции в конвейерные ленты;
- специализированное ПО;
- высокая скорость работы.

KUKA KR 90 R3700 PRIME K (KR QUANTEC PRIME)
Источник: https://www.prweb.com
Робот KUKA KR 90 R3700 PRIME K (KR QUANTEC PRIME) отличается не только изяществом и легкостью, но и сверхточной и жесткой конструкцией. Имеет высокую энергоэффективность и точность траекторий. Несмотря на небольшой вес, продуктивность машины невероятно высока при максимальной динамике. Грузоподъемность робота составляет 90 кг, радиус действия — 3,7 м.
При выполнении сложных операций с большими грузами роботы KUKA сверхвысокой грузоподъемности обеспечат вашему предприятию дополнительные производительные преимущества. Они с блеском справляются с такими задачами, как перемещение и обработка тяжелых и крупноразмерных деталей, обслуживание оборудования и палетирование.
 youtube.com/embed/TteyEMl6y5U»/>
youtube.com/embed/TteyEMl6y5U»/>
Fanuc LR-mate 200ID/5L
Источник: https://www.robots.com
Fanuc lr mate 200id 5l — робот для производственных работ в различных промышленных сферах. Оснащенный подвижной рукой, этот агрегат способен выполнять большое количество операций с грузами небольшого веса и размера. Устройство Fanuc lr mate 200id 5l отличается большой скоростью совершения операций, а также максимальной точностью.
Применяется в условиях ограниченной площади: узкое основание и поворотный узел с широким радиусом работы дают возможность эксплуатировать устройство даже в самых неудобных положениях. Все модели оснащены системами датчиков и сенсоров.
Ознакомьтесь на сайте с большим ассортиментом роботов для любого производства.
Какие преимущества дает вам использование промышленных роботов
Источник: https://www.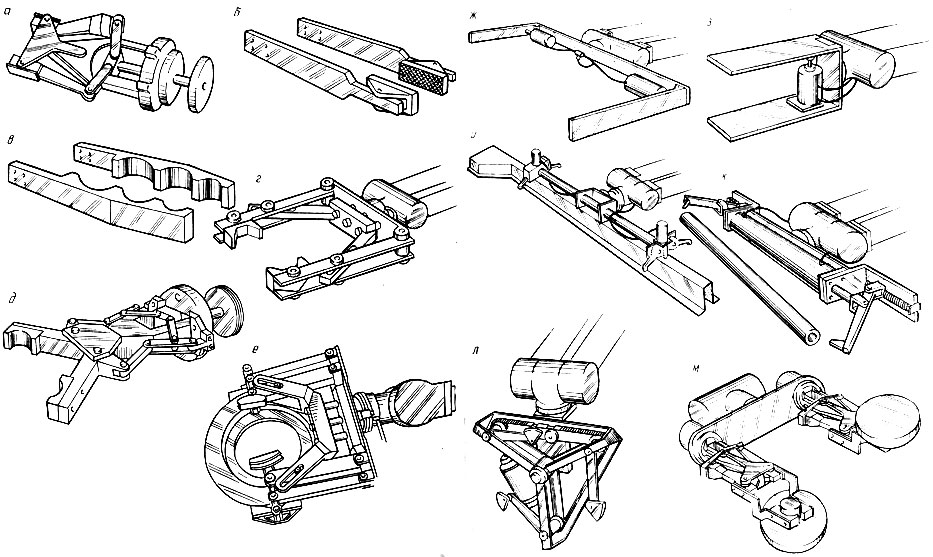 youtube.com
youtube.com
Эффективность
Промышленные роботы способны выполнять определенные задачи быстрее, точнее и лучше людей. Автоматизация процессов, которые раньше занимали значительно больше времени и ресурсов, приведет к большей эффективности производственной линии.
Пример: китайская компания Precision Technology Company заменила роботами более 90% сотрудников завода — там, где 650 человек собирали телефоны вручную, сейчас работает 60 роботов и 60 операторов, что увеличило производительность на 250% и уменьшило выход брака на 80%.
Качество
Благодаря высокому уровню точности и повторяемости, исправные роботы всегда будут производить только качественный продукт, соответствующий заданной программе, а также сократят необходимое для контроля качества время.
Безопасность
Промышленные роботы часто используются для выполнения задач, которые считаются опасными и/или вредными для человека, а также для выполнения трудоемких и повторяющихся задач. Используя промышленных роботов, вы улучшите условия труда и безопасность на своем предприятии. Роботы не устают и не совершают опасных ошибок, а также не страдают от болезней и травм.
Используя промышленных роботов, вы улучшите условия труда и безопасность на своем предприятии. Роботы не устают и не совершают опасных ошибок, а также не страдают от болезней и травм.
Источник: https://pixmafia.com
Рентабельность
Благодаря повышению производительности предприятия и качества продукции, а также сокращению ресурсозатрат, роботы позволяют увеличить рентабельность бизнеса.
Как оборудовать производство
Для оснащения предприятия робототехникой обращайтесь в Top 3D Shop — наши специалисты изучат ваши требования и задачи, условия размещения оборудования, учтут все тонкости и подготовят индивидуальный проект интеграции роботов, чтобы увеличить производительности и рентабельности предприятия.
Подписывайтесь на наш телеграм-канал с отборными кейсами Роботизации и Автоматизации со всех уголков мира:
https://tglink.ru/easy_robotics
Узнайте больше о возможностях усовершенствовать ваше производство интеграцией нового оборудования:
Автоматизированный завод. Промышленные роботы на производстве
Содержание:- Введение
- Автоматизированные линии производства
- Универсальные роботы-манипуляторы
- Роботы-сварщики
- Роботы-сборщики
- Роботы-резчики
- Роботы-маляры
- Гибочные роботы
- Роботы-грузчики
- Роботы-упаковщики
- Роботы-сортировщики
- Роботы для работы с опасными веществами
- Программное обеспечение для промышленной автоматики
- Заключение
Введение:
Экономика многих стран развивается в первую очередь за счет промышленности. Промышленные предприятия, такие как металлургические комбинаты, машиностроительные заводы, нефтеперерабатывающие концерны и фабрики легкой промышленности приносят ежегодно более 40 % прибыльности государств. И так как большинство индустриальных предприятий нашей страны приватизировано, речь идет об очень прибыльном бизнесе.
В промышленном бизнесе качество и производительность – это визитная карточка при работе с поставщиками и клиентами. Чем выше требования к качеству выпускаемой продукции, тем актуальнее становится внедрение современных технологий.
Предприятия внедряют роботизированные системы в производство в первую очередь для увеличения прибыли за счет сокращения рабочей силы. В Японии, Китае и США почти все промышленные заводы оснащены «по последнему слову техники». На них работает минимум работников, что обеспечивает низкую себестоимость выпускаемой продукции. В России и Украине применение роботизированных устройств пока ограничено. Устаревшее оборудование на предприятиях приводит к снижению эффективности и количества производства. И к тому же наносит вред окружающей среде. Для увеличения производства и качества продукции, компаниям необходимо позаботится об обновлении оборудования.
В наше время автоматизированные устройства для работы на заводах представлены в широком ассортименте. Роботы успешно используются в металлургии, машиностроении, легкой и пищевой промышленности. Они способны заменить человека в тяжелых и опасных условиях труда. Предоставляют скорость, точность, качество, а также высокую окупаемость. Это достижимо путем того, что роботам не нужно платить зарплату, оплачивать отпуск и обеспечивать соцпакетом.
Мы предлагаем вам узнать полезную информацию об автоматизированных системах и промышленных роботах, а также о выгодном применении этих устройств на промышленных предприятиях.
Автоматизированные линии производства:
Предприятия массового и мелкосерийного производства нуждаються в установлении автоматизированных линий производства. Эти механизмы представляют собой машины непрерывного режима работы в виде взаимосвязанных станков. Автоматические линии производятся во многих странах мира, в том числе в России и Украине и поставляются по цене от $10 000. Современные отечественные производственные линии заводов Днепропетровска, Донецка и Запорожья служат на комплексно-автоматизированных цехах по изготовлению различной продукции, включая функции обработки, контроля и сборки.
Механизмы управляються компьютером и позволяют осуществлять обработку деталей по динамичной технологии. В соответствии с требованием оптимальной загрузки станков частично изменяется порядок и маршрут обработки деталей. Компьютер планирует запуск и выпуск деталей, выполняет плановые, диспетчерские расчеты и рассчитывает режимы обработки в соответствии с избранным алгоритмом.
К производственным линиям относятся автоматические машины непрерывного литья заготовок (МНЛЗ). Современные машины непрерывного литья заготовок представляют собой целый комплекс сложного оборудования: механического, гидравлического, систем охлаждения и смазки, а также электроприводов с автоматизированной системой управления технологическим процессом. Установка данного устройства обеспечивает значительное сокращение потери металла, улучшение условий труда, постоянство условий производства и повышение производительности комбината.
Мартеновские печи и кислородные конвертеры уже давно не актуальные при производстве стали на металлургических комбинатах. Серьезные капитальные вложения на внедрение новейших технологий (печи-ковши, электропечи, электрометаллургические мини-заводы и непрерывное литье стали) на заводах Украины и России, будут гарантировать производительность в 1 млн. 320 тыс. тонн высококачественной стальной заготовки в год.
Универсальные роботы-манипуляторы:
Манипуляторы на заводах используются уже с середины 20-го века. Эти устройства представляют собой автоматизированный механизм, оборудованный специальным отличительным инструментом – так называемой «рукой» манипулятора. Эта «рука» и служит основным действующим органом в различных целях. Если это робот для сварки, рука-манипулятор выполняет сварочные операции, если робот-укладчик, рука служит для укладки и упаковки продукции. Естественно, принцип действия манипулятора зависит от его программирования и оснащения.
Разнообразие роботов-манипуляторов стремительно набирает обороты. На сегодняшний день существует 30 видов манипуляторов. Компании-производители промышленной робототехники представляют свои изобретения, начиная от универсальных манипуляторов до формовщиков готовой продукции. Эти устройства намного доступней, чем кажется, и сегодня даже среднестатистическое предприятие в год может позволить прибрести себе пару подобных механизмов по цене в среднем 2500 долларов за штуку.
Начните с универсальных роботов-манипуляторов. Универсальные промышленные роботы – это высокотехнологичные устройства, служащие для решения задач, связанных с автоматизацией производства. Применяются в основном в машиностроении и металлургии для сварки, резки, обслуживания станков, покраски, полировки, наплавки, механической обработки, распределения клея и наполнителей, плазменного напыления, перемещения грузов и паллетирования.
Компании ABB, Kawasaki и FANUC поставляют универсальных промышленных роботов по цене от 2000 до 4000 долларов в зависимости от функциональности устройства. Данные аппараты способны увеличить скорость и качество обработки деталей, но основными недостатками данных устройств являются неполноценное взаимодействие всех компонентов и невозможность проведения точнейших операций.
На современных машиностроительных и металлургических заводах широкого применения обретают «узкоспециальные» роботы-манипуляторы. Самыми распространенными являются роботы для сварки. Производства, изготавливающие ограниченное количество продукции, могут извлечь выгоду из внедрения автоматизации систем сварки. Этот процесс позволяет сократить количество квалифицированных сварщиков, так как робот работает в 8 раз эффективней человека.
Роботы-сварщики:
Сварочные манипуляторы представляют собой комплекс передовых технологий и комплектующих деталей, запрограммированных на выполнение дуговой и точечной сварки объектов. Манипуляторы служат для сварки ёмкостей, кранов, балок и цистерн. Устройства производят сварку стыковых и угловых швов, сварку прямолинейных и кольцевых швов и другие работы, требующие крайней точности. Преимущества автоматизированной сварки очевидны: манипуляторы обеспечивают высокое качество сварки и идентичность готовой продукции; снижают брак при обработке деталей; увеличивают скорость производства. Внедрение сварочных роботов в производство позволяет предприятиям сократить время изготовления продукции, включая сбор в сварочном кондукторе и процесс сварки с 30 до 7 минут.
При выборе поставщиков сварочного оборудования стоит принимать во внимание, какие компании производители могут дать гарантии качества своих устройств. Самыми квалифицированными специалистами в области автоматизированной сварки являются компании KUKA и Kawasaki. Они поставляют манипуляторы для сварки по цене в среднем $2300 и по отзывам промышленников, которые уже внедрили роботов данных компаний, устройства действительно надежны, эффективны и легки в эксплуатации.
Роботы-сборщики:
Далее рассмотрим манипуляторы для автоматической сборки деталей. Как показывают экономические исследования Московского государственного университета, до 25% всего производственного времени уходит на сборочные операции. Сборочные роботы-манипуляторы в основном представляют собой 6-ти осевые устройства с 6-тью степенями свободы, которые приводятся в действие за счет системы сервоприводов.
Сборочные роботы компаний iRobot и MOTOMAN являются одними из лучших механизмов для автоматизированной сборки. Они доступны на рынке промышленной автоматики по цене в среднем от 2000 долларов. Роботы предлагают высококачественную сборку продукции, поднимая производительность труда на 10-20% и снижая брак на 30-40%. Наибольший эффект от использования сборочных роботов достигается при полной автоматизации всей линии производства.
Роботы-резчики:
Предприятия металлургической промышленности также зачастую используют манипуляторы для резки металла — самостоятельные антропоморфные механизмы. Современные роботы для резки выпускаются с системой отслеживания текущего положения заготовки. По конструкции манипулятор для резки металла – один из самых сложных механизмов. Важным элементом робота является датчик контакта головки инструмента с металлической поверхностью. Бортовой компьютер обеспечивает точность позиционирования до 0,05 мм, чего достаточно для обработки даже небольших деталей, а так же заготовок, требующих особо точной резки. При выборе данных устройств, стоит учесть, что манипулятор должен обладать большой степенью подвижности, что обуславливает наличие большого количества осей и приводов. Такие машины могут предложить компании Daihen и Kawasaki стоимостью по ~ $1300 за шт. Наряду с невысокой стоимостью данные устройства обеспечивают стабильное и точное выполнение резки металла.
Роботы-маляры:
Важным элементом машиностроительных предприятий является окрасочное оборудование. Робототехника успела добиться существенных достижений в области данных устройств. Например, компании Adept и Triton поставляют роботов-манипуляторов для окраски по цене от 2500 долларов. Данные машины оснащены специальными пульверизаторами для окраски деталей и обладают повышенной гибкостью для защиты шлангов при подачи в рабочую зону красящего вещества от механических воздействий, скручивания и излома, загрязнения и запыления, что просто невозможно для выполнения людьми вручную.
Гибочные роботы:
Новаторством на предприятиях тяжелой промышленности является применение гибочных роботов. Робот для гибки – это простой автоматизированный станок, как правило, с гидравлическим или электрическим приводом. В качестве захватывающего приспособления устройства может использоваться как обычный манипулятор, так и пневматические присоски. Основным поставщиком гибочных манипуляторов является компания ROBOMAC, которая предоставляет современные устройства по цене $3165. Устройства способны осуществлять загрузку объекта в гибочную головку, подачу, поворот объекта и выгрузку после гибки. Как правило, результатом становится гибкая система, не требующая никаких дополнительных устройств для работы.
Роботы-грузчики:
В тяжелой и легкой промышленности не обойтись без грузоподъемных средств. Компании ABB, KUKA, FANUC и Epson предоставляют решения в области подъема тяжелых грузов весом больше тонны и транспортировку их от комбината до склада. Мощнейшие системы выполняют приёмку и отправку груза с невероятной скоростью и эффективностью. Стоимость данных «подъемников» зависит от количества и скорости подъема груза и колеблется между 1900 и 4000 долларов США.
Роботы-упаковщики:
Необходимость в сокращении времени внутрипроизводственной логистики, вредная для здоровья среда, тяжелый человеческий труд вызывает потребность в автоматизации процессов паллетирования. Скорость и точность работы роботов-паллетайзеров, несравнимы с человеческим трудом, а эффективность и универсальность значительно выше, чем у стандартной машины для паллетирования. Стоимость данных роботов достаточно высока. К примеру, арендовать на четыре месяца паллетайзер от OKURA стоит $80 000.
Предприятия легкой и пищевой промышленности заинтересованы в быстрой и качественной упаковке продукции с конвейера. Компании KOMATEC, Packmore и Epson предлагают выгодные решения для автоматизированной упаковки готовых изделий. Машины оснащены гибкой рукой-манипулятором, которая позволяет им с ловкостью и осторожностью упаковывать даже самые хрупкие предметы, не разбивая их в отличии от людей-упаковщиков. К примеру, робот-упаковщик от KOMATEC по цене $3700, действует таким образом: просматривает движение конвейера, определив изделие, получает сигнал на электронный блок управления, а тот, в свою очередь, подает команду механической руке взять изделие. Как видим, все движения робота совершаются по программе. Это способствует качественному и быстрому процессу упаковки объектов.
Роботы-сортировщики:
Далее рассмотрим подобных робоупаковщикам манипуляторов-сортировщиков. Эти устройства также оснащены рабочим инструментом и рядом датчиков определения продукции для точной её сортировки. К основным производителям «сортировщиков» относятся MOTOMAN и LEGO. Приобрести их устройства стало как никогда выгодно — от 2800 долларов.
Стоить отметить, что разнообразие манипуляторов не ограничивается вышеперечисленными устройствами. Компании-производители активно занимаются разработкой и внедрением роботизированных систем для наплавки, формовки, полировки и механической обработки продукции, которые с каждым днем становятся всё доступнее для промышленных предприятий.
Роботы для работы с опасными веществами:
Если вы являетесь владельцем химического завода или нефтеперерабатывающего предприятия, вам следует позаботиться о фильтрации рабочего помещения. Современные устройства фильтрации представляют собой различные газо- и пылеулавливатели, а также аппараты для работы с радиоактивными веществами. Газоулавливатели особенно хорошо представлены в ассортименте компании Блиц по цене 700 долларов.
Работа с радиоактивными веществами крайне опасна для человека, поэтому ученые активно работают над разработкой роботов для службы на химических предприятиях. Газо- и пылеулавливатели используются для утилизации опасных для здоровья человека веществ, газов и пыли и способствуют очищению воздуха. Установка одного такого устройства, например пылеулавливателя компании Torit, стоит около 3200 долларов. На крупном предприятии достаточно установить по одному пылеулавливателю в каждом цеху, и чистый воздух и безопасная среда труда гарантированы.
Нефтеперерабатывающие предприятия зачастую нуждаются в качественной проверке трубопроводов на коррозию. Эта проверка очень важна, так как из-за неисправности труб опасные ядовитые вещества могут попадать в окружающую среду и наносить пагубный на неё вред. Проверка трубопроводов изнутри людьми возможна, но лучше переложить этот процесс на роботов. Для проверки трубопроводов на коррозию служит «крошечный робопатруль». Лаборатории и компании робототехники, к примеру, SoCalGas, занимаются разработкой миниатюрных роботов, оснащенных камерами и датчиками, которые самостоятельно перемещаются по трубам и передают видеосъемку в режиме реального времени. На данный момент пока неизвестно, когда роботы будут доступны для продажи и по какой цене, но исследователи уверяют, что стоимость этих удивительных устройств не будет заоблачной.
Программное обеспечение для промышленной автоматики:
Программное обеспечение, как правило, для промышленных роботов пишется с ноля и разрабатывается отдельно для каждого робота. Принцип действия робота зависит от его запрограммированного интеллекта. Ведущие производители промышленной робототехники KUKA, FANUC, MOTOMAN и АВВ уделяют данному вопросу особое внимание и вкладывают приличные средства в разработку программного обеспечения для своих устройств.
Высокоинтеллектуальные роботы способны выполнять все свои движения в соответствии с требующейся манипуляционной операцией. При этом в память устройства управления записывается программа с необходимыми координатами и технологической информацией. Отличительными особенностями промышленных машин, наделенных высокими интеллектуальными способностями, являются:
- отсутствие электропривода
- высокая точность позиционирования детали за счет расположения органов управления
- самостоятельно обслуживаемые механизмы и детали.
На данный момент полностью автоматизированные, наделенные искусственным интеллектом машины – дорогостоящее удовольствие. К примеру, компания MOTOMAN сдает свои высокоинтеллектуальные манипуляторы в аренду на месяц за 280 000 долларов.
Заключение:
Таким образом, мы видим, как стремительно роботы развиваются в промышленной сфере. Передовые технологии всё больше освобождают человека от выполнения сложной и рутинной работы. Внедрение робототехники на заводах способно экономить энергоресурсы, снизить уровень загрязнения окружающей среды, уменьшить затраты на рабочую силу и увеличить эффективность производственного процесса. Использование роботизированных технологий предоставляет предприятиям уникальную возможность осуществить эволюционный скачок и оторваться от конкурентов. Ведь окупаемость затрат на роботов уже доказана на практике. Так что, позаботьтесь о своем будущем и о будущем своей страны уже сейчас.
Разбор конструкций, вариантов и опций КМУ – Основные средства
Выбор краноманипуляторной установки дело непростое. На рынке предлагается много моделей, вариантов и опций, из которых можно составить конфигурацию, оптимальную практически для любой конкретной работы. Впрочем, чтобы сделать правильный выбор, надо хорошо разбираться в этом многообразии. Так, например, принять это непростое решение помогут специалисты компании «Автобау» – дилера КАМАЗа, манипуляторов HIAB, FASSI, Palfinger, UNIC, DongYang, БАКМ, которая занимается изготовлением и продажей автотехники с кранами-манипуляторами: бортовых автомобилей, тягачей, самосвалов, автомобилей с фургонами и др. Большое разнообразие этой техники, недостаток информации по ее применению для разных технологических процессов ставят потребителя в тупик. Специалисты ЗАО «Автобау», опираясь на свой большой опыт в изготовлении разнообразной техники с кранами-манипуляторами, помогут определиться с выбором автомобилей с КМУ, необходимой для выполнения конкретных задач.
Конечно, лучше доверить подбор специалисту, но покупатель тоже должен понимать назначение различного краноманипуляторного оборудования. Мы постараемся познакомить читателей с основными понятиями в данной области. Прежде всего определимся с терминами.
В России существует деление грузоподъемных механизмов рассматриваемого нами типа на краны-манипуляторы и гидроманипуляторы. Гидроманипуляторы (ГМ) работают с гидравлическими орудиями, как правило, с грейферами (иногда с буровыми установками) и используются для перевалки, т. е. перегрузки бревен или металлолома. Это особый режим работы с высокой интенсивностью, примерно 1400 циклов в неделю. Отсюда к гидроманипуляторам предъявляют повышенные требования по надежности. Еще одно важное требование к ним – короткое время рабочего цикла. Груз практически все время одинаковый, т. е. операции и движения гидроманипулятора однообразные. Основное движение, которое позволяет быстро выполнять цикл, это маховые движения первой и второй секциями стрелы. Отсюда и особенности конструкции: первая секция длинная, вторая секция короткая с небольшой телескопической частью (чтобы при необходимости перенести груз дальше, чем обычно). Поэтому гидроманипуляторы не могут складываться за кабиной, так как они выходят за габариты кабины, в транспортном положении их просто укладывают на специальный кронштейн либо спереди, либо повернув назад.
В последние годы появились модели гидроманипуляторов иностранные и отечественные, которые способны складываться и умещаться в габариты автомобиля – так называемая обратная Z-образная схема складывания, когда последняя стрела расположена сверху, а грейфер оказывается наверху и потому может войти в габариты автомобиля. У таких гидроманипуляторов небольшой грузовой момент и ограниченная сфера применения.
Краноманипуляторные установки (КМУ) транспортируют грузы (чаще строительные) с помощью крюковой подвески, т. е. в классическом варианте не имеют гидравлического привода к рабочему органу. КМУ используются менее интенсивно (поместили груз на автомобиль и повезли на стройку), главной целью создателей КМУ было обеспечить максимальную грузоподъемность и точность позиционирования при минимальной массе самой установки. Для этого установка оснащена высокоточной медленно работающей гидравликой, которая максимально компенсирует динамические нагрузки, возникающие в процессе погрузочно-разгрузочных работ, и тем самым увеличивает ресурс КМУ. Поэтому КМУ отличаются от гидроманипуляторов более длительным временем рабочего цикла.
Расходы в гидросистеме этих манипуляторов значительно различаются: у гидроманипуляторов 70…90 л/мин, а у КМУ 10…45 л/ мин. Зато давление в гидросистеме КМУ значительно выше: у гидроманипуляторов до 20 МПа, у КМУ от 25 до 33 МПа. К тому же гидроманипуляторы даже конструктивно меньше приспособлены для операций, которые выполняют КМУ. По цене КМУ обычно дешевле гидроманипуляторов до 40%.
С очевидностью можно сказать, что гидроманипуляторы и краны-манипуляторы имеют принципиальные различия и по конструкции, и по функциям. В статье мы будем называть все установки рассматриваемого типа манипуляторами.
Надо заметить, что по российскому законодательству для лесных гидроманипуляторов не нужна регистрация в органах Ростехнадзора. Все остальные манипуляторы грузоподъемностью свыше 1 т и с грузовым моментом более 4 т.м подлежат регистрации.
В статье мы в основном будем говорить о выборе КМУ как наиболее распространенных манипуляторов.
Тип складывания КМУ
В Европе получили распространение КМУ шарнирно-сочлененной конструкции с Z-образной схемой складывания. В транспортном положении стрела располагается в поперечной плоскости автомобиля за кабиной. При установке Z-образной КМУ за кабиной грузовика вся масса крана приходится на переднюю ось (т. е. возможна ее перегрузка).
В Японии, Южной Корее и США большей популярностью пользуются L-образные КМУ с прямой телескопической стрелой и тросовой подвеской грузового крюка. Обычно их используют для погрузки-разгрузки базового автомобиля, а иногда прицепа. У КМУ L-образного типа стрела расположена над кузовом по ходу или против хода машины. Таким образом, она может помешать размещению в кузове высокого груза и не позволит насыпать груз «с шапкой». Зато при таком расположении масса КМУ частично перераспределяется на заднюю ось и не нагружает переднюю. У L-образного крана первая секция стрелы длинная, не может сложиться, но зато короткие телескопируемые секции. Такой кран работает на больших вылетах (6…8 м) быстрее Z-образного.
Иногда говорят, что у L-образных КМУ в отличие от Z-образных меньшее количество узлов и шарнирных соединений, поэтому их конструкция более проста и надежна. Это не совсем справедливое утверждение. У L-образных КМУ достаточно сложная конструкция механизма телескопирования, поэтому ремонт цилиндров выдвижения может быть трудоемким и затратным.
Прямая L-образная стрела не может обойти препятствие, например вертикальную стенку, которую легко преодолеет коленчатый Z-образный «коллега». Впрочем, существуют стрелы, совмещающие преимущества L- и Z-образных конструкций: у них первые две секции имеют шарнирное соединение, последующие секции телескопируются из второй. У такого крана больше степеней свободы, чем у классического L-образного.
Сложно сказать определенно, какая из конструкций тяжелее – L- или Z-образная. Из-за наличия «перекрывающихся» участков телескопическая стрела L-образной КМУ может быть тяжелее Z-образной. Однако у Z-образной стрелы высокой грузоподъемности мощные соединительные шарниры могут сильно утяжелять конструкцию, поэтому в каждом конкретном случае при выборе КМУ ее массу следует рассматривать отдельно.
Выбор между Z- и L-образным краном довольно тонкий вопрос, надо просчитывать цену того и другого, его возможности, возможности грузовика при установке той или другой КМУ и выбирать оптимальный по цене и возможностям вариант. Например, для тяжелой Z-образной КМУ требуется мощное (и дорогое) шасси, но можно использовать шасси полегче (и подешевле), поставив L-образный кран, однако он будет нависать над кузовом и т. д. L-образная КМУ для увеличения г/п должна постоянно увеличивать угол подъема стрелы, таким образом, для переноса габаритного груза потребуется очень длинная стрела. У Z-образных КМУ подъем груза осуществляется путем складывания-раскладывания секций. Для них сложно работать с тяжелыми грузами вблизи колонны, потому что после складывания стрелы ее сложно разложить. По этой причине в основании второй секции у Z-образных КМУ имеется крюковая подвеска, которую используют для подъема тяжелых грузов, причем работает только первая секция. Поэтому L-образная КМУ лучше справляется с тяжелыми, но компактными грузами, а с габаритными грузами лучше работают Z-образные КМУ.
В общем, L-образные КМУ более узкоспециализированные (например, если грузовик с L-образной КМУ с длинной стрелой используется при монтажных работах), чем Z-образные, а потому в России не пользуются особым спросом (новые). Распространены только недорогие японские и южнокорейские L-образные КМУ б/у, которые во множестве приобретены вместе с подержанными грузовиками. В городах наибольшим спросом пользуются Z-образные строительные КМУ и металловозные гидроманипуляторы.
Рабочие характеристики
Универсальным параметром манипулятора является грузовой момент, т. е. произведение массы груза на вылет стрелы. Грузовой момент традиционно измеряется в тоннах на метр (в системе СИ – в кН.м). Например, если вам надо поднимать груз 2 т на расстоянии 4 м от места установки КМУ, понадобится кран с грузовым моментом не менее 2.4 = 8 т.м.
Однако при подборе манипулятора нельзя ориентироваться только на грузовой момент. Придется проанализировать характер работы вашего манипулятора, какие грузы (по массе и размерам) и на каком вылете надо поднимать. Не следует думать, что, выбрав КМУ с грузовым моментом 16 т.м, вы обязательно сможете поднять 16 т при вылете стрелы 1 м: вряд ли найдется такой компактный 16-тонный груз, который расположился бы на расстоянии 1 м от КМУ.
Необходимо также учитывать возможности стрелы манипулятора: ее максимальный и минимальный вылет, грузоподъемность максимальную и минимальную (при максимальном вылете стрелы). Большое значение имеет высота подъема, которую может обеспечить манипулятор, а в некоторых случаях и глубина опускания ниже опорной поверхности, если груз надо будет опускать, например, в котлован. Иногда преимуществом L-образной КМУ называют способность опускать груз ниже уровня опорной поверхности. Следует заметить, что Z-образная КМУ также способна на такие операции, особенно если груз подвешен на стропах. Обычно приходится опускать груз не глубже 3…5 м. С такой обычной работой Z-образная КМУ справится не хуже L-образной. Чем длиннее стрела Z-образной КМУ, тем ниже она может опустить груз.
Иногда покупателю предоставляют схему стрелы манипулятора, на которой указываются только вылеты и грузоподъемность. Такой спецификацией может воспользоваться тот, кто хорошо разбирается в манипуляторах и примерно знает, что ему надо. Рекомендуем всегда пользоваться грузовысотной диаграммой, на которой можно точно увидеть возможности манипулятора, в том числе «амплитуду» (диапазон высот подъема крюка). У некоторых западных компаний существует электронная программа, позволяющая моделировать работу манипулятора с грузами. Это очень удобно: закладываются параметры груза и манипулятора и проверяются его возможности.
Вот некоторые общие правила.
• Выбирайте КМУ по характеристикам с некоторым запасом! Если КМУ будет работать не на пределе возможностей, она будет надежнее и прослужит дольше. Кроме того, возможны критические нештатные ситуации или ошибки в расчетах по массе и габаритам груза, при которых поможет запас по характеристикам. (Например, большинство манипуляторов, проданных компанией Palfinger за все время работы на рынке РФ, это мод. PK 15500 с максимальным грузовым моментом 14,6 т.м, в народе именуемые «6-тонники».)
• Обычно рекомендуют выбирать вылет стрелы таким, чтобы он превышал длину кузова хотя бы на 1…2 м. Но в каждом конкретном случае это должно решаться индивидуально, в зависимости от конкретных потребностей. Например, если у автомобиля удлиненный кузов, около 12 м, а грузить надо длинные швеллеры или трубы, достаточно будет вылета 6…7 м, чтобы стрела доставала до середины длины кузова. В России наиболее популярны (до 80…90% от общего числа) манипуляторы с вылетом 8…10 м, на седельные тягачи – 12 м.
• Обратите внимание на возможный угол поворота манипулятора, который обусловлен конструкцией поворотного устройства. Это либо рейка с гидроцилиндром, либо ОПУ – шестерня с гидромотором. Он может составлять 360° и более. Однако на практике угол поворота всегда ограничивают, потому что над кабиной обычно располагается зона неустойчивости (по диаграмме), и если манипулятор занесет туда тяжелый груз, машина может опрокинуться. Практически все производители поставляют манипуляторы без ограничения угла поворота. Лишь в инструкции по эксплуатации указывается сектор, где работа запрещена или ограничена. Поэтому при ручном управлении угол поворота манипулятора рекомендуется ограничивать либо механическим способом – вварить в механизм поворота металлические болванки, либо электрическим – установить концевые выключатели. Механические ограничители не позволяют изменить угол поворота, электрические обычно позволяют немного его менять. То же делают и при электронном управлении, чтобы застраховаться на случай, если программное обеспечение даст сбой (к сожалению в России электронное ограничение практически не применяется из-за дороговизны). Обычно оставляют угол поворота 220°, такого угла хватает для безопасной работы. Если же зона устойчивости распространяется на всю окружность, то вращение КМУ не ограничивают. Иногда угол поворота в 360° нужен, когда кран установлен на заднем свесе шасси.
Выбор стрелы
Не менее важна и форма поперечного сечения (профиль) стрелы: прямоугольник, пяти-, шести- или восьмигранник. Чем больше граней, тем лучше распределяются напряжения по профилю и, следовательно, прочнее, надежнее и легче стрела. Однако усложнение профиля влечет за собой удорожание стрелы, а потому для манипулятора небольшой грузоподъемности будет достаточно стрелы прямоугольного профиля. Стрелы прямоугольного сечения широко применяют на корейских манипуляторах.
Секции телескопической стрелы могут выдвигаться последовательно либо произвольно. При произвольном выдвижении первыми перемещаются те секции, где сопротивление в данный момент меньше. Системы с последовательным выдвижением секций стрелы более удобны, если манипулятор интенсивно используется для подъема грузов, так как последняя секция (с самым малым сечением) используется редко, и соответственно чем меньше она выдвигается, тем меньше изнашивается, а срок службы стрелы таким образом увеличивается. Однако такие стрелы сложнее и дороже.
Лебедка
При выборе КМУ L-образного типа обязательно уточняйте, установлена ли лебедка и от какого она производителя. Лебедка может быть установлена на колонне, на первом (не телескопируемом) звене стрелы или на оголовке последнего звена. В последнем случае грузоподъемность крана частично «съедается» за счет массы лебедки (как правило, незначительно, на 100…300 кг). Однако такая конструкция имеет и достоинства. Закрепленную на быстродействующих соединителях лебедку можно заменить другим видом сменного рабочего оборудования. Системы безопасности лебедки и манипулятора связаны, поэтому допустимая грузоподъемность КМУ при этом вылете стрелы не может быть превышена, но может ограничиваться и грузоподъемностью самой лебедки.
Длину троса следует выбирать в зависимости от предполагаемого характера работ: если грузы будут опускать в котлован, необходимо оснастить лебедку тросом достаточной длины, но лучше использовать трос минимальной необходимой длины. У некоторых производителей лебедок тросы имеют лишь стандартную длину.
Использование лебедки дает ряд преимуществ. Гидропривод лебедки обеспечивает низкую скорость опускания груза на место (посадочную скорость), что удобно при монтажных работах. Тросовая подвеска крюка позволяет поднимать-опускать груз из-за препятствия – стены, забора.
Иногда указывают как преимущество возможность манипуляций крюком (путем оттяжки троса), что дает возможность более точно позиционировать груз при опускании. Надо заметить, что такие действия не предусмотрены правилами и конструкцией манипулятора. При оттяжке тросов возникают нетипичные нагрузки на конструкцию манипулятора, на которые он не рассчитан. Еще некоторые владельцы применяют волочение груза за трос или раскачивание груза на крюке. Такое использование манипулятора не рекомендуется, так как может привести к выходу из строя шарниров, могут погнуться и штоки гидроцилиндров. В практике известны случаи изгибания штока первой секции стрелы. У L-образных манипуляторов с длинной тросовой подвеской оттягивать груз проще, но там не рекомендуется применять волочение (подтягивание) груза тросом, как это иногда делают на практике.
Выбор автомобильного шасси
Возможна установка манипуляторов на прицепы, тракторы, но чаще их устанавливают на бортовые автомобили и седельные тягачи.
Обычно в литературе рекомендуют, чтобы масса манипулятора составляла 20…25% полезной грузоподъемности шасси. Такое соотношение обеспечивает эффективное использование автомобиля по прямому назначению – для перевозки грузов. Однако все же следует исходить из конкретных задач, для которых приобретается манипулятор. Во-первых, следует учесть грузоподъемность передней оси, на которую приходится масса манипулятора. Перегруз не допускается! Учтите, что существуют недобросовестные установщики, которые могут поставить чрезмерно тяжелый манипулятор на шасси, перегрузив передний мост, и даже не предупредить об этом клиента, как и о том, что шасси снимут с гарантии, а мост может скоро выйти из строя.
Во-вторых, если нужен мощный манипулятор для подъема больших грузов на больших вылетах и не предполагается перевозить эти грузы на данном автомобиле (т. е. аналог автокрана), то масса манипулятора может «съедать» практически всю грузоподъемность шасси. Бывает и наоборот: на тяжелое мощное шасси устанавливают легкий манипулятор, если больше не нужно.
Российские производители шасси зачастую не указывают допустимую нагрузку на оси (в отличие от западных коллег, которые такую характеристику приводят), а вместо этого – допустимую полную массу на ось и распределение снаряженной массы по осям. Установщикам шасси приходится высчитывать допустимую нагрузку на ось, такие расчеты не дают точного результата, а значит, установщик манипулятора не знает точно, насколько он может нагрузить переднюю (или заднюю) ось.
Выберите место установки манипулятора. На задний свес его ставят, например, чтобы разгрузить переднюю ось, если ее грузоподъемность недостаточна или когда бортовой автомобиль эксплуатируется с прицепом. Но в этом случае потребуются дополнительные опоры, поскольку при таком расположении манипулятора ухудшается устойчивость автомобиля, а это дополнительные расходы.
По всей длине лонжеронов шасси европейских автомобилей имеется множество технологических отверстий, расположенных с определенным шагом. Они позволяют удобно располагать кронштейны манипуляторов и аутригеров, а также переносить другие агрегаты, если они мешают расположить компоненты манипулятора. На шасси российских производителей такие отверстия отсутствуют, раму сверлить запрещается. Поэтому для крепления манипуляторов на российских шасси применяются не очень удобные стремянки.
Компания «УралСпецТранс» серийно изготавливает спецтехнику с краноманипуляторными установками на шасси автомобилей «Урал» и КамАЗ, а также производит КМУ на базовые модели седельных тягачей, бортовые автомобили. На данный момент компания является официальным дилером ведущих производителей подъемного оборудования (КМУ). Всегда на складе компании «УралСпецТранс» большой выбор КМУ, а также автотехника с КМУ на шасси «Урал», КамАЗ. Компания специализируется на изготовлении эксклюзивных моделей, учитывая все пожелания и потребности заказчика.
Аутригеры
Аутригеры – важная часть крановой установки, от них напрямую зависят грузоподъемность и безопасность манипуляторов. Обычно аутригеры идут в комплекте с манипулятором.
По способу складывания в транспортном положении аутригеры бывают фиксированные (направлены вниз в транспортном положении) и поворотные (закидываемые вверх). Направленные вниз аутригеры при движении грузовика могут задеть за неровности грунта и повредиться, поэтому для России рекомендуются поворотные аутригеры, особенно если высота шасси небольшая. Почти все опоры, применяемые у нас, поворачиваются вручную. Но у тяжелых кранов закинуть опору достаточно трудно (масса около 100 кг), поэтому для тяжелых кранов применяют аутригеры, которые поворачиваются на 50° снизу, вдоль машины. Существуют «самоповорачивающиеся» опоры: при выдвижении-втягивании балки аутригера шестеренка прокручивается, и опора поворачивается на 180°. Переворачиваемые аутригеры с гидроприводом предлагают все производители, но эта опция непопулярна у российских покупателей из-за высокой цены (+2,5 тыс. евро).
Опоры могут быть короткими, средними и длинными. Выбор зависит от высоты шасси. Если высоты опоры не хватает, иногда наваривают на пятаки дополнительные пластины. Обычно в России заказывают средние или длинные опоры. Желательно иметь опоры такой длины, чтобы можно было вывесить подвеску, колеса шасси.
Аутригеры позволяют изменять угол наклона грузовика. При подъеме тяжелого груза сторону шасси, обращенную к грузу, несколько приподнимают с помощью аутригеров, это позволяет избежать опрокидывания. Если требуется завести стрелу в низкое окно, то соответствующую сторону шасси опускают, опуская аутригеры данной стороны и приподнимая аутригерами противоположную сторону. Благодаря этому стрела занимает наклонное положение.
Длину выдвижения балки можно выбрать из двух или трех вариантов. Выдвижение балок может быть ручным (с фиксацией в определенных положениях или произвольно), гидравлическим (с фиксацией в произвольном положении). Балки могут состоять из нескольких секций.
Опоры аутригеров бывают круглыми и квадратными в сечении. Квадратные обычно более массивные и мощные (южнокорейского производства). Однако стойки круглого сечения (обычно европейского производства), если они идут в комплекте к данной КМУ, гарантированно выдерживают все рабочие нагрузки. По массе стойки круглого сечения легче, чем квадратные, поэтому, если есть выбор, можно рекомендовать стойки именно круглого сечения.
Обязательно используйте подкладки под опоры. К КМУ иностранного производства можно заказать штатные опоры, однако из-за их дороговизны все используют отечественные или самодельные подкладки. Известно много случаев опрокидывания автомобилей с КМУ из-за проседания опор на мягком грунте.
Дополнительное оборудование, опции
Внимательно изучите дополнительное оборудование которое предлагается для КМУ, проконсультируйтесь со специалистами фирмы-поставщика. Возможно, будет полезно дооснастить вашу КМУ, например, охладителем масла, если предполагается интенсивная работа с мощным навесным оборудованием (буром) и возможен перегрев масла.
Для самых малых КМУ может как опция предлагаться автономная гидростанция (которая подключается к электросети автомобиля), т. е. КМУ будет работать не от КОМ. Однако следует учесть, что такая гидростанция не может иметь большие габариты, объем масла в ней невелик и возможны проблемы с перегревом масла.
Если владелец хочет увеличить вылет крана, то как самый дешевый вариант ему могут предложить удлинитель – секцию с ручным выдвижением. Например, у КМУ HIAB и у КМУ Palfinger можно устанавливать до трех механических секций. Дополнительную гидравлическую секцию тоже можно установить, но это будет довольно дорого.
Предлагаются и гуськи. Иногда это довольно сложные механизмы, с шарнирами, телескопическими секциями, требующие прокладки дополнительных гидролиний по стреле. Гуськи применяют, например, для работы под мостом – стрела опускается с моста, гусек заводят под мост и с рабочей платформы производят работы. Такие гуськи очень дорогие и предлагаются только на самых последних версиях КМУ со сложной и совершенной системой безопасности. В России такие гуськи почти не продаются – слишком дорого, они могут увеличить стоимость КМУ до 50%.
Еще одна интересная опция: отрицательный угол складывания между первой и второй секциями стрелы, который достигается путем введения в конструкцию траверс между секциями. У всех ведущих производителей есть такие конструкции. Гидроцилиндр подъема соединяется не со стрелой непосредственно, а с траверсами, которые изменяют угол приложения силы и кинематику движения стрелы. Благодаря этому меняется диаграмма грузоподъемности, амплитуда (движение крюка вверх) получается ближе к вертикали, потому что обычно при подъеме груз постепенно приближается к колонне манипулятора. При использовании траверс груз идет почти вертикально до определенной высоты и лишь потом начинает приближаться к колонне (это все видно по диаграмме). Таким образом, при использовании траверс меняется вылет, на котором манипулятор способен поднять определенный груз, т. е. изменяется не грузоподъемность, а диаграмма, но достигается эффект – как будто увеличилась грузоподъемность! В России, к сожалению, применение траверс не получило популярности: манипулятор с траверсами примерно на 10% дороже обычного.
Компания HIAB предлагает для некоторых моделей опции – траверсы, усиливающие стрелы, улучшающие кинематику и грузовысотную характеристику КМУ.
Также отличием нового модельного ряда КМУ Palfinger является новая «рычажная» схема (траверсы), увеличивающая грузоподъемность крана на разных вылетах стрелы. Данная система названа HPLS (High Power Lifting System).
Применение сменного рабочего оборудования может существенно расширить технологические возможности КМУ: предлагаются разнообразные ковши, бадья для бетона, а также вилочные захваты.
Органы управления, дистанционное управление
Ручное управление манипулятора рычагами с двух сторон (самый дешевый тип управления) может быть перекрестным или параллельным (второе менее удобное, так как в этом случае рычаги с противоположных сторон располагаются в обратном порядке). Бывает такое же ручное управление с платформы (чуть подороже) – сверху оператору хорошо виден кузов, это удобно. Управление с кресла, расположенного на колонне манипулятора, еще дороже. При дистанционном управлении (самое дорогое) в качестве резервного всегда имеется одностороннее ручное управление.
В России манипуляторы используют в основном для простых операций разгрузки-погрузки, поэтому у них простые и дешевые конструкция, системы управления и безопасности. Потребители предпочитают электрогидравлические системы безопасности – они менее чувствительны к перепадам температуры и напряжения в бортовой сети автомобиля, а также к квалификации обслуживающего персонала. Электронным управлением обычно оснащают сложные манипуляторы с длинной стрелой, гидравлическим гуськом, лебедкой и т. д.
Радиоуправление манипулятора с выносного пульта может предлагаться как опция. В некоторых случаях использование пульта очень удобно, например, если поднимаемый груз находится за забором.
Переоборудование готового манипулятора под радиоуправление теоретически возможно. Однако при управлении с радиопульта хуже ощущаются движения манипулятора, и у неопытного оператора будут получаться слишком резкие движения стрелы (если на манипуляторе стоит обычная гидросистема). Гидросистема должна быть специально оптимизирована под радиоуправление. Для полнофункционального радиоуправления необходимо устанавливать пропорциональные гидрораспределители (чем больше отклонение рычага, тем быстрее движения манипулятора) компенсационного типа, т. е. с компенсацией потоков, позволяющей гидросистеме работать плавно. Расход масла в такой гидросистеме больше, чем в обычной: 70…90 л/мин. Применяются гидронасосы с регулируемой подачей (на обычных – с фиксированной подачей). Применяются маслоохладители, потому что потоки огромные и масло интенсивно нагревается. Поэтому и цена растет, примерно на 30%, так как приходится заменять много компонентов и стоить они будут, как запчасти, т. е. на 50…70% больше заводской цены.
Некоторые производители предлагают как опцию «дешевое радиоуправление», похожее на пульт тельфера. Управляя таким пультом, невозможно выполнять одновременно две операции. «Дешевое радио» работает на обычных гидрораспределителях, без маслоохладителя, и удорожание составляет всего около 10%. Поэтому гораздо выгоднее и дешевле определяться сразу и покупать версию с дистанционным управлением. Радиопульт превращается в пульт кабельного управления простым присоединением кабеля.
Б/у или новая КМУ?
Полноценного рынка «трейд-ин» (прием старых КМУ в зачет стоимости новых) в России еще нет. Официальные представители основных западных производителей манипуляторов пока не занимаются продажей б/у кранов и «трейд-ин». В России существует очень большая потребность в недорогих подержанных манипуляторах. Однако в Европе цены на подержанные манипуляторы довольно высокие: манипулятор теряет половину стоимости только за 10…12 лет эксплуатации, поскольку в манипуляторах мало что изнашивается в процессе эксплуатации. Обычно сложно установить истинную наработку и состояние такого манипулятора, идентификационные таблички могут заменить, и весь риск дальнейшего использования ложится на самого владельца. Облегчает положение лишь то, что обслуживание КМУ несложно и владелец может его выполнить самостоятельно: достаточно регулярно менять масло и фильтр. Поэтому завоз подержанных КМУ в Россию популярности не приобрел. В России все эксплуатируют манипуляторы обычно до конца и не продают б/у. Если манипулятор б/у все же продают с российским шасси, то проблема, как правило, бывает в шасси, которое изнашивается сильнее, чем иностранный манипулятор. Поэтому рынок подержанных манипуляторов так и не сформировался.
Автор благодарит С. Литвиненко, менеджера по продажам ООО «Карготек Рус», и С. Малинина, специалиста фирмы PM Group S.p.A., за помощь в подготовке статьи
Краны-манипуляторы Ferrari установка и монтаж КМУ
В нашей компании вы можете купить кран манипулятор, как новый, так контрактный не эксплуатировавшися в России или установить манипулятор (КМУ), имеющийся у вас, на любое шасси по вашему желанию.
ГК Автоконструкция является дилером и Авторизованным монтажно-сервисным Центром ведущих брендов имеет сертификат Таможенного Союза на монтаж любых моделей манипуляторов с грузовым моментом до 50 тм., аккредитацию Ростехнадзора на установку, настройку и ремонт приборов безопасности.
Компании присвоен международный идентификационный код изготовителя транспортного средства (WMI) — FR4.
Продажа и монтаж Кранов-манипуляторов Ferrari
Монтаж кранов манипуляторов Ferrari
Компания F.lli Ferrari производит четыре различных серии кранов-манипуляторов: 300, 500, 700 и 900. Чтобы удовлетворить конкретные нужды различных рынков, новые модели имеют многосегментные гидравлические удлинители и гуськи. Кроме того, каждый кран-манипулятор является «сплавом» традиционных для компании F.lli Ferrari характеристик – например, все краны имеют литое стальное основание – и существует тенденция к увеличению практичности, обеспечению повышенного уровня технологии и выводу на рынок кранов, которые, кроме прочего, являются стильными и престижными.
Краны-манипуляторы Ferrari
Преимущества кранов манипуляторов (КМУ) Ferrari- Литое основание. Оно дает значительное преимущество благодаря возможности увеличить толщину стали или чугуна в местах максимальной нагрузки. Большинство КМУ Феррари имеет литые основания: средние/большие краны используют стальные основания, приваренные к структуре крана, а остальные краны снабжены чугунными основаниями.
- Большой модельный ряд. Грузовой момент кранов Феррари лежит в диапазоне от 0,93 до 74 т.м. Из 4-х серий мы всегда подберем Вам кран, наиболее подходящий для решения ваших конкретных задач.
- Срок службы Феррари КМУ – более 10 лет. Наши краны для долгой надежной работы.
- Легкая и прочная конструкция. Литое основание ferrari КМУ и шестигранное сечение стрелы дает возможность достичь легкости без потери прочности.
- Поворотные аутригеры идут в качестве стандартного оборудования, упрощая доступ к элементам базового шасси. Это очень удобно в транспортном положении КМУ Феррари
- Гидравлическая система безопасности максимально проста и надежна, без электроники. Она не откажет зимой, при низких температурах.
- Модульная конструкция позволяет легко адаптировать кран к вашей специфике в любой момент после пуска в эксплуатацию.
- Унификация компонентов конструкции. Многие запчасти унифицированы. Поэтому ассортимент запчастей на складе не так велик и многие запчасти подходят к кранам разных серий, что упрощает ремонт и поиск запасных частей для кранов Феррари.
- Простота в обслуживании и ремонте. Кран манипулятор легко обслуживать и просто ремонтировать. Для этого не требуется особое оборудование или спецключи. Простая конструкция дает легкий доступ ко всем узлам и запчастям.
- Большой выбор кранов с дистанционным управлением. Небольшая цена дистанционного решения позволяет работать с максимальным комфортом.
Все эти Особенности КМУ Феррари в совокупности подтверждают наш первоначальный тезис о том, что купить Феррари кран – это мудрое и осознанное решение.
Продажа, установка кранов манипуляторов Ferrari
Наши краны серии 500 могут быть оборудованы радиоуправлением. Почти каждая модель может использовать инновационное «одноручное» радиоуправление, связанное с управляющим клапаном Bosch Rexroth, давая пользователю возможность добавлять такое дополнительное оборудование для КМУ, как лебедка, ковш или ворот. Эта система RDC, маленькая и компактная, настроенная компанией Hetronic для F.lli Ferrari, является модулем управления по радио, позволяющим управлять каждым отдельным движением крана одной рукой, за исключением опорной ноги, которой в целях безопасности следует управлять двумя руками. Для максимально простой работы и экономичности радоуправление питается от двух стандартных батареек АА. Краны серии 500 (модели 515, 523, 530, 540, 541, 550, 551, 561, 571, 581) имеют максимальную нагрузочную способность от 1,4 до 7,9 тм и горизонтальную досягаемость от 4,55 до 13,75 м. Модели Ferrari 561, Ferrari 571 и Ferrari 581 также доступны в версиях с гуськом.
500 серия кранов манипуляторов Ferrari
Кран манипулятор Ferrari 561
Установка кранов манипуляторов Ferrari
Кран манипулятор Ferrari 561
Стандартное исполнение
- Высокопрочная специальная сталь
- Пескоструйная обработка поверхности
- Литое основание
- Шестигранное сечение стрелы
- Гидравлический вылет до 10,45 м (12,05 м с механическим удлинителем)
- Фланцевые клапана
- Двустороннее управление
- Самосмазывающиеся подшипники
- Фитинги SAEJIC 1514I
- Поворотный крюк
- Монтажный комплект
- Поворотные аутригеры
- Подушки скольжения в телескопических стрелах
Установка КМУ FERRARI
Дополнительные опции
- Механические удлинители стрелы
- Сверхширокие аутригеры (4500)
- Дополнительные задние аутригеры
- Дополнительные гидравлические функции на стреле
- Гидравлическая лебедка
- Радиоуправление
- Поворотные аутригеры
- Применение со специальным оборудованием
- Система контроля нагрузки крюка RLC
Монтаж КМУ FERRARI
Диаграмма грузоподъемности при максимальном вылете стрелы КМУ Ferrari 561
Цена КМУ может меняться в зависимости от комплектации
Система контроля ECM4
Система контроля ECM4 позволяет контролировать работу крана на всех стадиях его работы. Данное устройство обеспечивает безопасную работу крана, а так же позволяет контролировать работу таких дополнительных устройств, как: лебедка, гусек, ротаторы или грейфер. Дисплей помогает следить за уровнем цилиндров и рабочим статусом крана. Предупредительный сигнал сообщит о необходимом ТО или о возможных ошибках системы. В случае неполадок системы, на дисплее появится код ошибки для скорейшего ее устранения на сервисе.
Система ECM4 записывает все действия крана, а также ТО и прочие обновления, установленные в сервисе, что позволяет пользователю отследить все операции, проведенные с манипулятором.
Система «Single Hand» легкий пульт управления
- дистанционный контроль скорости
- радио контроль всех функций крана
- контроль работы стабилизаторов
- управление тросом (опц)
- работа на 2х аккумуляторных батарейках
Система Multifunctional Radio Control
При помощи радиоуправления у Вас есть возможность с максимальной точностью контролировать как загрузку, так и разгрузку. Данное устройство сокращает время работы, а так же обеспечивает дополнительную безопасность. Все пульты радиоуправления защищены от внешних радио-магнитных сигналов.
Система RED POWER
Система Red power позволяет работать с грузами на большой высоте, сохраняя при этом первоначальную мощность стрелы.
- быстрая и точная работа с громоздкими грузами вблизи от стрелы
- сохранение грузоподъемности при вертикальном поднятии стрелы
- сохранение эффективности работы на большой высоте
- четкость исполнения на всех версиях с гуськом
Система SDV
Система клапанов плавного опускания (Smooth Descent Valve) за счет использования специального уравновешивающего клапана уменьшает колебания стрелы и обеспечивает прекрасное управление движениями.
Система PB — Power Boost
Система Power Boost позволяет кранам марки Ferrari поднимать более тяжелые грузы на максимальных вылетах стрелы. Благодаря фиксированной системе впрыска масла, появляется возможность регулировать давление и мощность подъема крана. Система подключается автоматически и абсолютно не влияет на скорость работы крана.
Гидравлическая версия:
В обычных установках масло впрыскивается в регулирующий клапан, при включении системы Power boost часть масла возвращается в резервуар ,а остальная часть попадает в регулирующий клапан.
Электронная версия:
На установках, оборудованных системой радио контроля и Power boost впрыск масла регулируется пультом управления. Данная функция не влияет на скорость работы крана и обеспечивает максимально точное выполнение работы и абсолютную безопасность.
Система EQS
Система EQS обеспечивает безопасную работу крана благодаря уравновешивающему клапану, который обеспечивает быструю работу выдвижных секций. Специальный клапан гидропривода повторно пропускает масло через выдвижные секции ,что увеличивает скорость выдвижных секций на 50%.
Система OFP
Нашими техническими специалистами была разработана система безопасности оператора крана, благодаря которой поворот стрелы отграничен в зоне местонахождения оператора. Благодаря вмонтированным сенсорам контролируется участок работы между стрелой и основанием, работа стрелы и угол поворота.
Метки: Краны-манипуляторы Ferrari, Монтаж КМУ FERRARI, Установка КМУ FERRARI
ООО «Транс-ЕК»
О магазине
Компания «Трансбизнес ЕК» это официальный представитель марки Фотон в России, это одна из компаний, которой доверяют китайские автопроизводители и многие компании Урала. Промышленная китайская техника помимо своего качества обладает и еще одним преимуществом — это хорошо развитая дилерская сеть по всей стране.
Китайские малотоннажные автомобили Фотон (Foton) в наличии и под заказ.
В соотношении цена-качество китайские грузовые автомобили Фотон, Фав, Бав, Тата значительно выигрывают как у российских производителей, так и у европейских. С каждым годом все большее количество российских строительных компаний отдает предпочтение китайской строительной технике, не только из-за цены, но и благодаря минимальным габаритам, максимальной грузоподъемности, низкому расходу топлива, что в комплексе делает использование крайне эффективным и позволяет снизить себестоимость услуг и производства.
Простые в эксплуатации и ремонте автомобили Фотон находят своих покупателей. Еще одним достоинством обладает коммерческий транспорт Фотон – это большое разнообразие моделей по грузоподъемности и назначению, огромное количество надстроек для любых сфер деятельности (рефрижераторы, манипуляторы, будки, фургоны и другие).
С наших торговых площадок осуществляется продажа Фотон, Бав, Фав, Тата с дальнейшим техническим обслуживанием, покупая у нас можно быть уверенным в качестве и гарантийном обслуживании автомобилей.
В нашей компании вы можете приобрести любую литературу от автопроизводителя. Доказательством того, что китайские производители не случайные гости на российском рынке является техническая литература Фотон, Бав, Фав, Tata на русском языке, которая позволяет разобраться с устройством грузовой техники даже новичкам, не прилагая особых усилий.
Региональный склад запасных частей Фотон (Foton) по адресу г. Екатеринбург, ул. Новостроя 1АК.
Наша компания, являясь официальным дилером, гарантирует вам, что у нас найдется все самое необходимое для вашей техники. На нашем складе всегда есть необходимые запчасти, даже детали, не пользующиеся особым спросом, такие например, как коробка переключения передач (КПП) Фотон, Фав, Бав, Тата наша компания может обеспечить своевременную доставку не только отдельных деталей, но и узлов и целых партий запчастей, что является для вас залогом бесперебойной работы.
Мы предлагаем запчасти для китайских грузовых автомобилей Фотон, Бав, Фав, Тата как официальный представитель, поэтому для вас это не только залог бесперебойной работы, но также и безопасности вашей техники. Мы, как дилер китайских автомобилей Фотон даем гарантии на запчасти Фотон, Бав, Фав, Тата на все комплектующие имеются сертификаты качества и соответствия, в подлинности которых можно не сомневаться.
Только у нас есть договоренности о поставке запчастей напрямую от производителя, что значительно удешевляет их цену, к тому же, это способствует созданию на складах достаточных резервов запчастей, причем иногда даже самых редко-заменяемых узлов, таких например как задний мост в сборе Фотон, Бав, Фав, Tata. К тому же у нас есть детали автомобиля, которые должны меняться по первому требованию, иначе поломка таких деталей может явиться причиной будущего капитального ремонта, который надолго выведет из строя технику. К таким деталям относится, например, Поршневая группа Фав, Фотон, Бав, Тата при поломке которой можно лишиться не только поршней, но и всего двигателя.
На нашем сайте вы можете воспользоваться корзиной заказов и сформировать заказ, который будет доставлен вам на указанный адрес. Нашей компанией проводятся периодические акции, с которыми Вы всегда сможете ознакомиться в разделе сайта «Скидки» с предложениями узлов и деталей со скидкой.
Принцип работы нашей компании основан на заключении долгосрочных договоров по поставке запчастей, комплектующих и самих автомобилей. Мы не гонимся за мгновенной максимальной прибылью, нам важнее постоянное сотрудничество. Благодаря такой политике руководства компании нам доверяют партнеры, для постоянных клиентов у нас действуют специальные программы.
Как вы можете использовать роботов в своей работе
Робототехника. Если бы вы попытались подобрать самое модное слово в управлении складом, распределительным центром и цепочкой поставок за последние несколько лет, это было бы оно.
И не зря: технологии автоматизации складов за последние годы сделали огромный шаг вперед, обещая полностью изменить способ выполнения заказов и погрузочно-разгрузочные работы в отрасли. Робототехника уже играет неотъемлемую роль в этом сдвиге и будет продолжать делать это только по мере того, как технологии становятся все более и более сложными, помогая операциям всех видов решать общие проблемы, такие как:
Загрузить наше руководство по автономным мобильным роботам (AMR)
При этом часто возникает некоторая путаница в том, что именно мы имеем в виду, когда говорим слово «робототехника» применительно к управлению складом и выполнению заказов.
Часто, когда люди слышат термин «роботы», они думают о чрезвычайно высокотехнологичных машинах, таких как гуманоидные боты, создаваемые в Японии. Но правда в том, что фраза «робототехника» включает в себя гораздо больше, чем эти реалистичные творения, особенно когда речь идет о мирах выполнения заказов, обработки материалов, распределения и логистики цепочки поставок. Все уровни робототехники подпадают под этот широкий термин.
Ниже мы обсудим некоторые из наиболее распространенных типов складской робототехники, которые вы можете использовать в своей работе, в том числе:
- Автоматизированные системы хранения и поиска (AS / RS)
- Технология доставки товаров человеку ( G2P)
- Автоматизированные управляемые транспортные средства (AGV)
- Автоматизированные управляемые тележки (AGC)
- Автономные мобильные роботы (AMR)
- Шарнирно-сочлененные роботы-манипуляторы
1.Автоматизированные системы хранения и поиска (AS / RS) и технология передачи товаров человеку (G2P)
Автоматизированные системы хранения и поиска (AS / RS) — это семейство автоматизированных складских технологий, которые помогают автоматизировать процесс инвентаризации, товары для использования, а затем эффективно возвращать их на хранение, когда они больше не нужны. AS / RS обычно сочетается с программным обеспечением для выполнения складских операций (WES), которое управляет различными процессами, происходящими в рамках операции.
AS / RS бывает разных типов, каждый из которых лучше подходит для выполнения определенных задач и обработки определенных типов товаров.Они в основном работают либо как подъемные краны, поднимающие товары между проходами с продуктом, либо как челноки, которые перемещаются по фиксированной дороге между стеллажной конструкцией. Когда товары больше не нужны, они возвращаются в их слот.
Технология доставки товаров физическому лицу (G2P) аналогична AS / RS и часто считается ее подкатегорией. G2P отличается своим применением (хотя существуют разные типы технологий доставки товаров к человеку), но принцип тот же: автоматизированная система хранения доставляет артикулы на стационарную станцию комплектования, где оператор заполняет отдельные заказы.
И AS / RS, и технология доставки товаров к человеку работают над повышением эффективности, позволяя выполнять малоквалифицированные задачи на машинах, чтобы ваши рабочие могли выполнять более сложные задачи, которые не могут быть выполнены с помощью автоматизации, позволяя им добавлять больше ценность для вашей операции.
2. Автоматизированные управляемые транспортные средства (AGV) и автоматизированные управляемые тележки (AGC)
AGV и AGC — это две технологии, которые часто объединяются под общим термином «робототехника», и легко понять, почему.Оба они используются для автоматического перемещения инвентаря, расходных материалов и материалов из одного места в другое на вашем предприятии, что позволяет упростить процесс пополнения запасов, а также высвобождает работников для выполнения более важных задач.
Как именно AGV и AGC перемещаются по складу, зависит от конкретной используемой модели. Некоторые следуют магнитным полосам или дорожкам, которые физически проложены на маршрутах вокруг объекта. Другие могут сочетать эти треки с другими передовыми технологиями, такими как LiDAR, камера зрения, инфракрасные и другие датчики, чтобы ориентироваться в полуавтономном режиме, что позволяет им избегать препятствий на своем заранее определенном маршруте.
Хотя AGV и AGC во многом схожи, они все же имеют ряд различий. Самым большим из этих различий является тот факт, что AGV, как правило, выдерживают гораздо большие нагрузки, чем их аналоги с тележкой меньшего размера.
В конечном итоге AGV и AGC используются для завершения работы, которая обычно выполнялась бы оператором вилочного погрузчика (или группой операторов) на вашем предприятии, перемещая продукцию и материалы из одного места в другое. Хотя это очень важно для вашей работы, это относительно низкоквалифицированная работа.Используя AGV и AGC для этой перевозки, ваши сотрудники могут выполнять задачи, которые повышают ценность вашей работы.
3. Автономные мобильные роботы (AMR)
Автономные мобильные роботы (AMR) во многом похожи на AGV и AGC:
- Они могут перемещаться по объекту или складу без вмешательства человека
- Они могут использоваться для транспортировки инвентаря или материалов из одного места в другое.
- Они могут облегчить стратегию комплектования.
- И многое другое.
. Но хотя они могут работать для достижения одной и той же цели в рамках вашего производства, они построены на очень разных технологиях, что придает им разные свойства.
AGV и AGC обычно работают, следуя заранее заданному маршруту между местоположениями. Эти маршруты устанавливаются путем прокладки каких-то физических направляющих: магнитных полос, проводов, датчиков, встроенных в пол, и т. Д. Они могут быть объединены с такими технологиями, как LiDAR, инфракрасный порт и камеры, которые позволяют автомобилю определять препятствия и избегать аварий, но эти элементы не используются в качестве основной навигации.
Автономные мобильные роботы, с другой стороны, не полагаются на такие жесткие заранее заданные маршруты.Вместо того, чтобы следовать за магнитными полосами или проводами, AMR полагаются на множество сложных бортовых датчиков, компьютеров и карт, которые позволяют им понимать и интерпретировать окружающую среду. Это дает им большую гибкость для создания собственных маршрутов между точками на складе или на объекте, выявляя и избегая препятствий и изменяя маршрут, когда это необходимо. Конечным результатом является робот, который гораздо лучше справляется с динамической средой, предлагаемой большинством операций по выполнению заказов.
Кроме того, AMR бывают разных видов, что позволяет им выполнять ряд функций при выполнении заказов.
4. Роботизированные манипуляторы с шарнирно-сочлененной рамой
Шарнирно-сочлененные манипуляторы — еще один пример робототехники, которая проникла в области распределения и производства. По сути, эти инструменты представляют собой многосуставные конечности, которые можно использовать для подъема, перемещения, поворота и других манипуляций с рядом товаров на складе или в распределительном центре.
В этом качестве шарнирный робот-манипулятор может использоваться для выполнения ряда функций в рамках операции, в том числе:
- Прием / хранение: По мере поступления продукта на ваше предприятие можно использовать шарнирный манипулятор. разгрузка продукта на поддоны и перемещение его на стеллажи.
- Производство: Когда товары производятся на собственном предприятии, шарнирно-сочлененные манипуляторы могут перемещать тяжелые изделия намного легче, чем рабочие, и могут использоваться в средах, которые в противном случае могут быть вредными для человека-оператора.
- Сбор / упаковка: Для операций, связанных с нехваткой рабочей силы, можно даже использовать шарнирно-сочлененные манипуляторы меньшего размера для сбора и упаковки, которые обычно выполняются рабочими.
- Отгрузка: Эти машины также можно использовать для укладки больших заказов на поддоны в наиболее эффективном кубе.
Использование технологий для раскрытия потенциала вашей деятельности
В зависимости от операции, робототехника может играть очень важную роль в сокращении затрат на рабочую силу и сокращении воздействия нехватки рабочей силы, влияя на все, от приема до хранения до комплектации, сортировки и упаковки.От AS / RS и G2P до AGV и AGC до автономных мобильных роботов и шарнирных манипуляторов — обязательно найдется какой-то тип робота, который вы сможете использовать в своей работе.
При этом, какой именно уровень робототехники имеет смысл для вашей собственной работы, будет во многом зависеть от специфики вашего бизнеса и отрасли. Квалифицированный системный интегратор может помочь вам определить, какие решения наиболее подходят для вас.
Типы и использование автономных мобильных роботов (AMR)
Последние несколько десятилетий принесли колоссальные изменения в мир выполнения заказов и обработки материалов.От роста затрат на рабочую силу до сокращения числа квалифицированных рабочих и повышения давления на следующий день, в тот же день и двухчасовой доставки — сегодняшние операции по выполнению заказов сталкиваются с множеством новых проблем, которые необходимо преодолеть.
Освоение новых технологий, процессов и процедур всегда было важной частью головоломки для дистрибьюторских операций, которые должны регулярно модернизироваться и адаптироваться, чтобы оставаться конкурентоспособными и прибыльными в этой новой реальности. Но с учетом того, что доступные технологии расширяются так же быстро, как сейчас, может быть трудно точно определить, какие решения автоматизации наиболее подходят для ваших нужд.
Загрузите наше руководство по автономным мобильным роботам (AMR)
Сфера складской робототехники, особенно, может многое предложить, когда речь идет о технологиях автоматизации, которые можно использовать для повышения производительности и эффективности. Хотя определенные типы складских роботов, такие как AGV, AS / RS и другие, существуют уже много лет, многие менеджеры складов задаются вопросом о новом игроке на рынке: автономных мобильных роботах, также известных как AMR.
Что такое автономные мобильные роботы (AMR)?
В общих чертах, автономный мобильный робот (AMR) — это любой робот, который может понимать свое окружение и перемещаться в нем без непосредственного наблюдения оператора или по фиксированному заранее определенному пути. У AMR есть набор сложных датчиков, которые позволяют им понимать и интерпретировать окружающую среду, что помогает им выполнять свою задачу наиболее эффективным способом и по возможному пути, перемещаясь вокруг фиксированных препятствий (здания, стойки, рабочие станции и т. Д.) и различные препятствия (например, люди, погрузчики и мусор).
Несмотря на то, что AMR во многом схожи с автоматическими управляемыми транспортными средствами (AGV), они отличаются по ряду важных аспектов. Самым большим из этих различий является гибкость: AGV должны следовать гораздо более жестким, заранее заданным маршрутам, чем AMR. Автономные мобильные роботы находят наиболее эффективный маршрут для достижения каждой задачи и предназначены для совместной работы с операторами, такими как операции по отбору и сортировке, тогда как AGV обычно этого не делают.
В среде склада и распределительного центра эти сложные технологии интегрированы с системами управления складом, что позволяет AMR повышать гибкость для создания собственных маршрутов между точками на складе или объекте. Конечным результатом является робот, который гораздо лучше может работать с людьми в динамической среде, предлагаемой большинством операций по выполнению заказов.
Автономные мобильные роботы делают процессы и рабочие процессы более эффективными и производительными.Обычно это достигается за счет выполнения задач, не связанных с добавленной стоимостью, таких как транспортировка, сбор и сдача продукта, чтобы освободить рабочих для выполнения других задач, которые повышают ценность продукта / операции, например, сбора, проверки или упаковки. Заказ.
Типы автономных мобильных роботов
Несмотря на то, что они все еще относительно молодая технология, AMR уже разделились на несколько различных разновидностей, каждая из которых лучше подходит для выполнения определенного типа действий.
По этой причине, когда имеют место дискуссии об AMR, они, как правило, сосредотачиваются на приложении, для которого предназначена технология, а не на конкретном названии или модели.
Как правило, AMR можно разделить на три (3) широких сегмента:
- AMR, которые перемещают запасы в пределах объекта
- AMR, которые помогают в процессе комплектования
- AMR, которые представляют собой гибкое решение для сортировки
Ниже мы обсудите различные типы AMR, доступные для выполнения каждого из этих действий, чтобы помочь вам лучше понять, какой тип может помочь улучшить вашу работу.
AMR, которые переносят инвентарь и продукт
Транспортировка инвентаря и продукта из одного места в другое на предприятии, как правило, является задачей с низким уровнем квалификации, которая мало или совсем не добавляет ценности продукту или операции. Таким образом, это часто является одной из первых задач, которые нужно автоматизировать, когда операция решает, что это оправдано. Автоматизация транспортировки продукции означает, что работники могут оставаться на своей основной работе, чтобы выполнять другие, более ценные задачи, в то время как работа доставляется к ним и забирается с них с помощью AMR.
Раньше, когда предприятие хотело автоматизировать транспортировку продукции на предприятии, основными доступными опциями были вилочные погрузчики, конвейеры и грузовые автомобили. Хотя эти варианты эффективны, они обычно требуют трудозатрат, занимают площадь и требуют капиталовложений.
Сегодня существует ряд AMR, специально разработанных для восполнения пробелов в эффективности функциональных возможностей. Вместо того, чтобы работать только с большими и тяжелыми грузами, они предназначены для подъема и выгрузки отдельных ящиков, сумок и предметов.
То, как эти системы работают, будет зависеть от конкретной модели AMR.
AMR, помогающие в комплектовании
Комплектование заказов — одна из самых дорогостоящих задач, выполняемых в рамках операции — не потому, что для этого требуется высокий уровень обучения или навыков (это возможно), а потому, что это занимает очень много времени. Фактически, физическая прогулка с места на место в пределах объекта может составлять до 75% времени, связанного со сбором.
Когда дело доходит до дополнения операции подбора с помощью AMR, в вашем распоряжении множество различных вариантов.К наиболее распространенным относятся:
- AMR, используемые при комплектации заказов
- AMR, которые действуют как гибкое решение для сортировки
- AMR, повышающие видимость запасов
Мы рассмотрим каждый из этих вариантов ниже.
1. AMR, используемые при комплектовании заказов
Существует множество разновидностей AMR, разработанных специально для сокращения времени в пути, связанного с комплектованием. Это достигается за счет сокращения времени в пути сборщика за счет доставки продукта к сборщику. AMR можно использовать для повышения производительности операций комплектования несколькими способами.
AMR, используемые при традиционном комплектовании
Мы определяем традиционный комплектование как хранение артикулов в стационарной, прямой зоне комплектования на стеллажах или стеллажах определенного типа, где комплектовщики перемещаются из места хранения в место хранения, собирая артикулы и помещая их в отдельные контейнеры для заказа. на конвейере, тележках или вручную.
При зональном комплектовании AMR перемещает сумку / корзину для заказа на стеллажи или стеллажи в пределах зоны. Сборщик, работающий в этой зоне, затем может выбрать инвентарь из окружающих локаций для выполнения заказа.Для управления сборщиком можно использовать расширенное зрение, RF, списки выбора бумаги или подсветку. Как только заказ будет выполнен, AMR заберет сумку и доставит ее в следующую зону для дальнейшей комплектации или на упаковочную станцию для окончательной отгрузки. Этот процесс повторяется с несколькими AMR, которые работают и транспортируются во многие зоны. Конечным результатом является то, что рабочий может тратить больше времени на сбор заказов и меньше тратить время на прогулки и поиск.
AMR, используемые при отборе товаров к человеку
Отбор товаров к человеку включает хранение нескольких артикулов в секциях стеллажей, стеллажей или ящиков.AMR предназначены для извлечения определенного SKU, найденного на полке. Бот маневрирует под стеллажом и отрывает его от земли. Затем AMR перемещается по кратчайшему пути к назначенной станции отбора.
Станции комплектования спроектированы так, чтобы иметь очередь AMR со стеллажами на них, готовыми к комплектованию. AMR перемещается в нужное положение, и световой индикатор отборщика указывает оператору выбрать правильный подбор и количество. Затем оператору предлагается разместить правильный артикул и количество в операционные заказы, которые у него есть на своей станции.По мере того, как они помещают артикул в надлежащие открытые заказы, AMR уходит, и появляется новый. Это гарантирует, что следующий выбор всегда ждет оператора.
Системы WMS / WES управляют всем процессом выполнения заказа. Он отслеживает местоположение и количество каждого сохраненного артикула, чтобы координировать и оптимизировать задачи AMR. Это исключает ненужные затраты времени оператора на ходьбу, поиск и задержку, повышая производительность до 450%.
С помощью этого типа системы можно повысить производительность, настроив упаковочные станции для определенных типов заказов:
- Однострочные заказы: Доставьте количество ящиков с одним артикулом на станцию и выполните несколько заказов за один раз.
- Заказы VAS: Заказы, которые медленно собираются и / или упаковываются, требуют подарочных карт или особого обращения, например, хрупких товаров.
- Отдельные станции электронной торговли и розничной / оптовой торговли: Эти заказы имеют разные профили, которые влияют на производительность. Наличие отдельных станций для каждого типа заказа повысит общую производительность и точность.
Кроме того, для операций, связанных со стратегией «комплектование с тележкой», AMR могут быть невероятно полезны при транспортировке тележек из одного места в другое на предприятии.Например, они могут перемещать тележки между зонами или доставлять полные тележки для упаковки, обработки и отправки. Автоматизация этой транспортировки может сократить общее время цикла заказа, позволяя сборщикам оставаться в своей зоне, сокращая время в пути и повышая эффективность.
AMR, которые упрощают комплектование другими способами
Помимо разновидностей, рассмотренных выше, существуют другие способы использования AMR для облегчения процесса комплектования.
Например, их можно использовать для пополнения SKU в реальном времени.AMR можно использовать не только для переноса контейнеров для пополнения в зону прямого захвата, но и для автоматического складирования контейнеров на стеллаже, стеллаже или стеллаже для картонных коробок. Хост-система знает, когда в хранилище SKU заканчивается, и может создать и доставить требуемый запас для пополнения.
В операции выполнения, в которой используется конвейер для транспортировки контейнеров с заказами посредством комплектования, упаковки и отгрузки, все еще могут быть продукты или заказы, которые не подходят для конвейерной системы.Продукт может быть хрупким, или контейнер слишком велик, чтобы попасть на конвейерную систему, или в ходе операции 80% мест сбора может обслуживаться конвейерной системой, а 20% (самые медленно движущиеся SKU) хранятся и отбираются в автономной зоне. В этих ситуациях AMR можно использовать как гибкий конвейер для транспортировки заказов через комплектование, а затем доставлять выполненные заказы непосредственно на указанную станцию или зону упаковки или отгрузки. Если есть заказы на комплектование ящиков, в которых выполняются заказы с раздельными ящиками, AMR можно использовать для обработки поддонов или картонных коробок и устранения связанных с этим трудозатрат.
2. AMR для гибкой сортировки
Автономные мобильные роботы также могут играть важную роль в сортировке. Различные модели оснащены различными технологиями обработки. От конвейерных роликов до наклонных лотков и систем с поперечными лентами, AMR оснащены широким спектром решений для сортировки, включая:
- Высокоскоростная сортировка посылок
- Выполнение заказов электронной торговли
- Обработка возвратов
- Краткосрочная сортировка
Высокоскоростная сортировка AMR легко достигается за счет использования парка моделей AMR с наклонным лотком TiltSort-Bot.Эти боты работают на антресоли с желобами для размещения или заказа позиций. Либо люди, либо роботизированные руки вводят элемент в верхнюю часть TiltSort-Bot. Камера индукционной станции над ботом считывает штрих-код и взлетает по кратчайшему пути к желобу назначения. Как только он достигает своего положения желоба, он останавливается параллельно ему и наклоняет предмет с бота и вниз по желобу. Предметы или посылки собираются в мешки, гейлорды или контейнеры. После завершения либо оператор, либо AMR отправляет выполненный заказ на отгрузку.Другой AMR приносит пустой контейнер, чтобы возобновить процесс сортировки.
Сортировка по этажам для электронной коммерции, возврата, комплектации и выполнения заказов может выполняться с помощью сортировщика HighTilt-Bot AMR. Эти устройства имеют высоту 42 дюйма и оснащены откидной крышкой. Эта система работает непосредственно на полу и может быть расширена или уплотнена в зависимости от повседневных потребностей.
На приведенном выше рисунке индукционные станции расположены по бокам. Предметы или посылки доставляются на каждую станцию.Оператор просто помещает товар штрих-кодом вверх на бота. Камера выше считывает штрих-код, и AMR перемещается по кратчайшему пути к месту назначения заказа. Пунктом назначения может быть гей-лорд, сумка или палета. AMR останавливается, когда он параллелен положению, и наклоняет элемент в место хранения. Когда позиция заполнена или завершена, приходит AMR передачи и перемещает ее к станциям упаковки, расположенным в передней части зоны. Другой перенос AMR доставляет пустой гейлорд, контейнер или поддон в открытую позицию для возобновления этой позиции.
Консолидация и сортировка возвратов с использованием рабочих станций размещения. В этом приложении AMR переносят на рабочую станцию открытый гейлорд, мусорное ведро или поддон. Они выстраиваются в очередь. Когда один завершен и уходит, другой AMR перемещается в позицию. Оператор получает указание положить в корзину нужный товар и нужное количество. Этот процесс повторяется до завершения.
AMR затем заберет завершенный заказ на буферное хранилище, отгрузку или место подбора для выполнения заказа.Это приложение обладает огромной гибкостью при разработке и внедрении. Это приложение избавляет операторов от траты времени на прогулки и поиск и чрезвычайно гибко подходит для различных бизнес-требований.
Эти роботы используют широкий спектр технологий для ввода и разгрузки инвентаря. Общие методы индукции включают: роботизированные манипуляторы, ручное размещение, конвейер, стеллажи и многое другое. Точно так же AMR могут выгружаться в лотки, стеллажи, стеллажи, конвейеры, рабочие станции и многое другое.
Это позволяет AMR получать продукт, сортировать его и транспортировать туда, где он должен быть. Эти AMR могут использоваться для транспортировки с конвейера на конвейер, перекрытия пробелов и расширения существующей транспортировки.
Поскольку AMR нелинейны, их можно использовать для упорядочивания продуктов в операциях комплектования и отгрузки. Товар может выходить из комплектации в определенном порядке, который не идеален для укладки заказа на поддоны. AMR могут принимать продукт в любом порядке и доставлять его на станцию укладки на поддоны, чтобы самый тяжелый продукт находился внизу, а хрупкий или самый легкий — вверху.
Этот же метод можно применить к прицепам с напольной загрузкой, которые разгружаются в обратном порядке. AMR можно использовать для сортировки контейнеров заказов таким образом, чтобы последняя остановка загружалась первой, а первая остановка загружалась последней.
AMR, повышающие видимость запасов
Точная и ясная видимость запасов — знание того, где находится продукт в вашем распределительном центре, складе и всей цепочке поставок — критически важна для современного выполнения заказов. Но для особо крупных и сложных операций перемещение и сверка запасов может быть сложным и трудоемким процессом для координации.Парк AMR, непосредственно интегрированных с системой, позволяет автоматизировать процесс, что значительно сокращает время и затраты, необходимые для обеспечения максимальной производительности и точности заказов.
Никакая система инвентаризации не является идеальной, потому что происходят события, которые не регистрируют правильное количество продукта, полученного, размещенного, пополненного или отобранного. Система управляет каждой из этих задач и имеет встроенные процессы проверки для выявления нарушений и аномалий инвентаризации. Он также управляет подсчетом циклов, чтобы выявить нарушения до того, как они станут эксплуатационной проблемой.
Итог
Имеет ли смысл использовать автономные мобильные роботы (AMR) или другой тип автоматизации для выполнения ваших заказов, будет во многом зависеть от специфики вашего бизнеса. Опытный и проверенный системный интегратор может помочь вам определить наилучший путь развития вашего бизнеса. У них есть навыки и опыт, чтобы помочь вам проанализировать вашу деятельность и дать рекомендации, которые подходят для вашего бизнеса и деятельности.
В отличие от большинства обычного погрузочно-разгрузочного оборудования и систем, AMR поддаются проверке концепции (POC).Модульность, масштабируемость и гибкость AMR позволяют проектировать и внедрять POC-системы с минимальными затратами. После завершения POC практически вся система может быть перемещена и интегрирована в полную систему. Экономия времени и ресурсов при снижении рисков. Чтобы разобраться в этом процессе, позвоните или напишите консультанту Conveyco по электронной почте.
Глоссарий терминов по робототехнике | Определения и примеры робототехники
Термины, определения и примеры робототехники
Функция графического 3D-дисплея
Функция трехмерного графического отображения (далее именуемая функцией трехмерного отображения) заключается в том, что трехмерная модель робота отображается в подвесном окне программирования, и может быть подтверждено текущее значение робота.Используя многооконную функцию, позиция обучения задания, отображаемая в содержании задания, также может быть подтверждена в окне 3D-дисплея. Когда функция функциональной безопасности активна, также может отображаться диапазон функциональной безопасности.
Абсолютные данные (данные ABSO)
Абсолютные данные (данные ABSO) — это поправочный коэффициент для данных, который устанавливает указанное нулевое значение, когда робот находится в заданном исходном положении (положение калибровки).
Точность
Точность — это измерение отклонения между командной характеристикой и достигнутой характеристикой (R15.05-2), или точность, с которой может быть достигнуто вычисленное или вычисленное положение робота. Точность обычно хуже, чем повторяемость руки. Точность не постоянна по всему рабочему пространству из-за влияния кинематики звена.
Активный совместимый робот
Активно совместимый робот — это робот, в котором изменение движения во время выполнения задачи инициируется системой управления. Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.
Фактическая позиция
Положение или расположение точки управления инструментом. Обратите внимание, что это не будет точно таким же, как позиция запроса, из-за множества невыявленных ошибок, таких как отклонение линии связи, нерегулярность передачи, допуски в длине линии связи и т. Д.
Привод
Силовой механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию, чтобы вызвать движение робота) (R15.07). Привод реагирует на сигнал, полученный от системы управления.
Плечо
Связанный набор звеньев и механических соединений, включающий робот-манипулятор, который поддерживает и / или перемещает запястье и кисть или рабочий орган в пространстве. Сама рука не имеет рабочего органа.
См. Манипулятор, Рабочий орган и Запястье.
Шарнирно-сочлененный манипулятор
Манипулятор с рукой, которая разделена на секции (звенья) одним или несколькими суставами.Каждое из сочленений представляет собой степень свободы в системе манипулятора и допускает поступательное и вращательное движение.
Шарнирное соединение
Описывает сочлененное устройство, такое как сочлененный манипулятор. Шарниры обеспечивают вращение вокруг вертикальной оси и подъем из горизонтальной плоскости. Это позволяет роботу достигать ограниченного пространства.
Сборочный робот
Робот, специально разработанный для соединения, подгонки или иным способом сборки различных деталей или компонентов в готовые изделия.В основном используется для захвата деталей и соединения или подгонки их друг к другу, например, при производстве на сборочных линиях.
Функция автоматического измерения
Для оптимального движения робота необходимо указать массовые характеристики рабочего органа. Эти свойства могут быть получены из CAD-модели инструмента. Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может регистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести.
Автоматический режим
См. Режим воспроизведения.
Ось
Направление, используемое для задания движения робота в линейном или вращательном режиме. (ISO 8373)
Вмешательство оси
Область пересечения осей — это функция, которая определяет текущее положение каждой оси и выводит сигнал в зависимости от того, находится ли текущее положение в пределах предварительно определенного диапазона.
База
Устойчивая платформа, к которой крепится промышленный робот-манипулятор.
Базовая система координат
Базовая система координат (иногда называемая мировой системой координат) определяет общую опорную точку для ячейки или приложения. Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа)
Базовая ссылка
Стационарная базовая конструкция манипулятора робота, поддерживающая первый сустав.
Приработка
Burn-In — это процедура тестирования робота, при которой все компоненты робота работают непрерывно в течение длительного периода времени.Это делается для проверки движения и программирования движения робота на ранних этапах, чтобы избежать сбоев в работе после развертывания.
Компьютерное проектирование (CAD)
Компьютерное проектирование (САПР). Приложения компьютерной графики, предназначенные для проектирования объектов (или частей), которые должны быть изготовлены. Компьютер используется в качестве инструмента для разработки схем и создания чертежей, которые позволяют точно производить объект. Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, создавать линии заданной длины, ширины или угла, а также удовлетворять различные геометрические формы.Эта система также позволяет проектировщику испытывать моделируемую деталь при различных напряжениях, нагрузках и т. Д.
Карусель
Вращающаяся платформа, которая доставляет объекты роботу и служит системой очереди объектов. Эта карусель доставляет объекты или детали на станцию загрузки / выгрузки робота.
Декартовы координаты
Декартовы координаты — это тип системы координат, которая определяет положение точки в двухмерном пространстве с помощью пары числовых чисел, которые дополнительно определяют расстояние до фиксированных осей, перпендикулярных друг другу.Проще говоря, график XY представляет собой двумерную декартову систему координат. Когда точка задана в трехмерном пространстве (график XYZ), она составляет трехмерную декартову систему координат. Положение TCP робота указывается в декартовой системе координат.
Декартов манипулятор
Декартов манипулятор — это манипулятор с призматическими шарнирами, который позволяет перемещаться по одной или нескольким из трех осей в системе координат X, Y, Z.
Декартова топология
Топология, в которой повсюду используются призматические соединения, обычно расположенные перпендикулярно друг другу.
Робот с декартовыми координатами
Робот с декартовыми координатами — это робот, чьи степени свободы манипулятора определяются декартовыми координатами. Это описывает движения восток-запад, север-юг и вверх-вниз, а также вращательные движения для изменения ориентации.
Категория 3 (Cat3)
Категория 3 (категория 3) означает, что элементы системы управления, связанные с безопасностью, будут спроектированы таким образом, чтобы:
Одиночные неисправности не препятствуют правильной работе функции безопасности.
Одиночные неисправности будут обнаружены при следующем запросе функции безопасности или до него.
Когда происходит единичный отказ, безопасное состояние должно поддерживаться до тех пор, пока обнаруженный отказ не будет исправлен.
Обнаружены все разумно предсказуемые неисправности.
Центробежная сила
Когда тело вращается вокруг оси, отличной от той, которая находится в центре его масс, оно оказывает внешнюю радиальную силу, называемую центробежной силой, на ось, которая удерживает его от движения по прямой тангенциальной линии.Чтобы компенсировать эту силу, робот должен приложить противоположный крутящий момент в суставе вращения.
Тип кругового перемещения
Расчетный путь, который выполняет робот, имеет круглую форму.
Зажим
Конечный эффектор, который служит пневматической рукой, которая контролирует захват и отпускание объекта. Тактильные датчики и датчики силы обратной связи используются для управления силой, приложенной зажимом к объекту. См. «Концевой эффектор».
Зажим
Максимально допустимая сила, действующая на область тела в результате столкновения робота, когда период контакта приводит к пластической деформации мягких тканей человека.
Сила зажима
При контакте может привести к зажатию части (ей) тела.
Замкнутый
Управление осуществляется роботом-манипулятором посредством обратной связи. Когда манипулятор находится в действии, его датчики постоянно передают информацию контроллеру робота, который используется для дальнейшего направления манипулятора в рамках данной задачи. Многие датчики используются для передачи информации о размещении манипулятора, скорости, крутящем моменте, приложенных силах, а также о размещении целевого движущегося объекта и т. Д.См. Обратную связь.
Коллаборативный робот
Термин, используемый для описания роботизированной системы, предназначенной для работы в одном или нескольких из четырех совместных режимов.
Интерпретатор команд
Модуль или набор модулей, определяющий значение полученной команды. Команда разбивается на части (разбирается) и обрабатывается.
Командная позиция
Конечная точка движения робота, которую пытается достичь контроллер.
Соответствие
Смещение манипулятора в ответ на силу или крутящий момент. Высокая податливость означает, что манипулятор немного перемещается при нагрузке. Это называется пористым или упругим. При стрессе низкая комплаенс будет жесткой системой.
Робот, соответствующий требованиям
Робот, который выполняет задачи по отношению к внешним силам, изменяя свои движения таким образом, чтобы эти силы сводились к минимуму. Указанное или разрешенное движение достигается за счет поперечной (горизонтальной), осевой (вертикальной) или вращательной податливости.
Конфигурация
Расположение ссылок, созданное определенным набором совместных позиций на роботе. Обратите внимание, что может быть несколько конфигураций, приводящих к одному и тому же положению конечной точки.
Контактный датчик
Устройство, которое обнаруживает присутствие объекта или измеряет величину приложенной силы или крутящего момента, приложенного к объекту при физическом контакте с ним. Контактное зондирование можно использовать для определения местоположения, идентичности и ориентации деталей.
Непрерывный путь
Описывает процесс, при котором робот контролирует весь пройденный путь, в отличие от метода обхода от точки к точке. Это используется, когда траектория рабочего органа наиболее важна для обеспечения плавного движения, например, при окраске распылением и т. Д. См. «От точки к точке».
Алгоритм управления
Монитор, используемый для обнаружения отклонений траектории, в котором датчики обнаруживают такие отклонения, и приложения крутящего момента вычисляются для приводов.
Команда управления
Команда, подаваемая роботу с помощью устройства ввода от человека к машине. См. Кулон (Обучение). Эта команда принимается системой контроллера робота и интерпретируется. Затем соответствующая команда подается на исполнительные механизмы робота, которые позволяют ему реагировать на начальную команду. Часто команда должна интерпретироваться с использованием логических единиц и определенных алгоритмов. См. «Устройство ввода и цикл команд».
Устройство управления
Любая часть управляющего оборудования, обеспечивающая средства для вмешательства человека в управление роботом или роботизированной системой, например кнопка аварийного останова, кнопка запуска или селекторный переключатель.(R15.06)
Режим управления
Средства, с помощью которых инструкции передаются роботу.
Управляемость
Свойство системы, с помощью которого входной сигнал может переводить систему из начального состояния в желаемое состояние по предсказуемому пути в течение заранее определенного периода времени.
Контроллер
Устройство обработки информации, входными данными которого являются как желаемое, так и измеренное положение, скорость или другие соответствующие переменные в процессе, а выходными данными являются управляющие сигналы для управляющего двигателя или исполнительного механизма.(R15.02)
Контроллерная система
Механизм управления роботом обычно представляет собой компьютер определенного типа, который используется для хранения данных (как робота, так и рабочей среды), а также хранения и выполнения программ, управляющих роботом. Система Контроллера содержит программы, данные, алгоритмы; логический анализ и различные другие операции обработки, которые позволяют ему выполнять. См. Робот.
Система координат или рамка
Система координат (или рамка) определяет исходное положение и ориентацию, с которой можно измерить положение робота.Все положения робота определены со ссылкой на систему координат. Роботы Yaskawa используют следующие системы координат:
Центральный процессор (ЦП)
Центральный процессор (ЦП) — это основная печатная плата и процессор системы контроллера.
Кубическая зона помех
Эта область представляет собой прямоугольный параллелепипед, который параллелен базовой координате, координате робота или координате пользователя. Контроллер YRC1000 определяет, находится ли текущее положение TCP манипулятора внутри или за пределами этой области, и выводит это состояние в качестве сигнала.
Цикл
Однократное выполнение полного набора движений и функций, содержащихся в программе робота. (R15.05-2)
Циклическая система координат
Система координат, которая определяет положение любой точки с точки зрения углового размера, радиального размера и высоты от базовой плоскости. Эти три измерения определяют точку на цилиндре.
Цикло-привод
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси.
Цилиндрическая топология
Топология, в которой плечо следует радиусом горизонтального круга с призматическим шарниром для подъема или опускания круга. Не пользуется популярностью в промышленности.
Выключатель аварийного отключения
Устаревший срок. См. Включение устройства.
степеней свободы
Количество независимых направлений или суставов робота (R15.07), которые позволяют роботу перемещать свой конечный эффектор через требуемую последовательность движений.Для произвольного позиционирования необходимо 6 степеней свободы: 3 для положения (влево-вправо, вперед-назад и вверх-вниз) и 3 для ориентации (рыскание, тангаж и крен).
Прямой привод
Совместное срабатывание, в том числе без элементов трансмиссии (т. Е. Тяга привинчена к выходу двигателя).
Время простоя
Период времени, в течение которого робот или производственная линия останавливаются из-за неисправности или отказа. См. Время безотказной работы.
Привод
Редуктор скорости (зубчатый) для преобразования низкого крутящего момента на высокой скорости в высокий крутящий момент на низкой скорости.См. Разделы Harmonic Drive, Cyclo Drive и Rotary Vector Drive).
Прямая доставка
Метод подвода предмета к рабочему месту под действием силы тяжести. Обычно желоб или контейнер размещают таким образом, чтобы по окончании работы над деталью она упала или упала в желоб или на конвейер с небольшой транспортировкой робота или вообще без нее.
Динамика
Изучение движения, сил, вызывающих движение, и сил, обусловленных движением. Динамика манипулятора робота очень сложна, поскольку является результатом кинематического поведения всех масс внутри конструкции руки.Кинематика манипулятора робота сложна сама по себе.
Аварийный останов
Работа схемы с использованием аппаратных компонентов, которая перекрывает все другие органы управления роботом, снимает мощность привода с исполнительных механизмов робота и вызывает остановку всех движущихся частей. (R15.06)
Переключатель включения
См. Включение устройства.
Разрешающее устройство
Устройство с ручным управлением, которое при постоянном включении разрешает движение.Освобождение устройства должно остановить движение робота и связанное с ним оборудование, которое может представлять опасность. (R15.06)
Кодировщик
Устройство обратной связи в руке робота-манипулятора, которое предоставляет контроллеру данные о текущем положении (и ориентации руки). Луч света проходит через вращающийся кодовый диск, который содержит точный узор из непрозрачных и прозрачных сегментов на своей поверхности. Свет, который проходит через диск, попадает в фотодетекторы, которые преобразуют световой рисунок в электрические сигналы.См. Раздел «Обратная связь, управление с обратной связью» и «Датчик обратной связи».
EOAT
См. Захват или Концевой эффектор.
Рабочий орган
Вспомогательное устройство или инструмент, специально предназначенные для крепления к запястью робота или монтажной пластине для инструмента, чтобы робот мог выполнять свою задачу. (Примеры могут включать: захват, пистолет для точечной сварки, пистолет для дуговой сварки, распылительный пистолет или любые другие инструменты.) (R15.06)
Конечная точка
Номинальное управляемое положение, которого манипулятор будет пытаться достичь в конце пути движения.Конец дистального звена.
Ошибка
Разница между фактическим ответом робота и отданной командой.
Расширяемость
Возможность добавления ресурсов в систему, таких как память, жесткий диск большего размера, новая карта ввода-вывода и т. Д.
Предел внешнего усилия
Пороговое значение, при котором робот перемещается или сохраняет свое положение, даже при приложении внешних сил (при условии, что силы не превышают пределов, которые могут вызвать ошибку).
Обратная связь
Возврат информации от манипулятора или датчика к процессору робота для обеспечения самокорректирующегося управления манипулятором.
См. Раздел «Управление обратной связью» и «Датчик обратной связи».
Управление с обратной связью
Тип управления системой, получаемый, когда информация от манипулятора или датчика возвращается контроллеру робота для получения желаемого эффекта робота. См. Раздел «Обратная связь, управление с обратной связью» и «Датчик обратной связи».
Датчик обратной связи
Механизм, через который информация от сенсорных устройств возвращается в блок управления робота. Информация используется в последующем направлении движения робота. См. «Управление с обратной связью и управление с обратной связью».
Гибкость
Способность робота выполнять самые разные задачи.
Силовая обратная связь
Метод обнаружения, использующий электрические сигналы для управления рабочим органом робота во время работы рабочего органа.Информация поступает от датчиков силы рабочего органа к блоку управления роботом во время выполнения конкретной задачи, чтобы обеспечить улучшенную работу рабочего органа.
См. Раздел «Обратная связь», «Датчик обратной связи» и «Датчик силы».
Датчик силы
Датчик, способный измерять силы и крутящий момент, прилагаемые роботом и его запястьем. Такие датчики обычно содержат тензодатчики. Датчик предоставляет информацию, необходимую для обратной связи по силе. См. Force Feedback
Решение для прямой кинематики
Расчет, необходимый для определения положения конечной точки с учетом положений суставов.Для большинства топологий роботов это проще, чем найти решение с обратной кинематикой.
Передняя кинематика
Вычислительные процедуры, определяющие, где находится рабочий орган робота в пространстве. В процедурах используются математические алгоритмы вместе с совместными датчиками для определения его местоположения.
Рамка
Система координат, используемая для определения положения и ориентации объекта в пространстве, а также положения робота в его модели.
Блок функциональной безопасности (FSU)
Блок функциональной безопасности (FSU) — это компонент контроллера робота Yaskawa, который обеспечивает программируемые функции безопасности, которые обеспечивают совместную работу робота. Поскольку эти функции безопасности являются программируемыми, FSU позволяет минимизировать площадь, занимаемую расположенным поблизости оборудованием, а также зоны, доступные для человека. FSU состоит из двух параллельных центральных процессоров (ЦП), работающих одновременно, что обеспечивает двухканальную проверку.Кроме того, FSU получает позицию робота от своих энкодеров независимо от системы управления движением робота. Основываясь на этой обратной связи, FSU контролирует положение, скорость и положение манипулятора и инструмента.
Портал
Регулируемый подъемный механизм, который перемещается по фиксированной платформе или гусенице, поднятому или на уровне земли по осям X, Y, Z.
Портальный робот
Робот с тремя степенями свободы по системе координат X, Y и Z.Обычно состоит из системы намотки (используемой как кран), которая при намотке или размотке обеспечивает движение вверх и вниз по оси Z. Катушка может скользить слева направо по валу, который обеспечивает движение по оси Z. Катушка и вал могут двигаться вперед и назад по направляющим, которые обеспечивают движение по оси Y. Обычно используется, чтобы расположить концевой эффектор над желаемым объектом и поднять его.
Самотечная загрузка
Сила, прилагаемая вниз, из-за веса манипулятора робота и / или нагрузки на конце руки.Сила создает ошибку в отношении точности положения концевого эффектора. Компенсирующая сила может быть вычислена и применена, чтобы вернуть руку в желаемое положение.
Захват
Концевой эффектор, предназначенный для захвата и удержания (ISO 8373), а также «захватывания» или захвата объекта. Он прикреплен к последнему звену руки. Он может удерживать объект, используя несколько различных методов, таких как: приложение давления между своими «пальцами», или может использовать намагничивание или вакуум для удержания объекта и т. Д.См. «Концевой эффектор».
Ручная
Зажим или захват, используемый в качестве рабочего органа для захвата предметов. См. Концевой эффектор, Захват.
Ручное управление
Совместная функция, позволяющая оператору вручную направлять робота в желаемое положение. Эта задача может быть решена за счет использования дополнительного внешнего оборудования, установленного непосредственно на роботе, или робота, специально разработанного для поддержки этой функции. Оба решения потребуют использования элементов функциональной безопасности.Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Гармонический привод
Компактный легкий редуктор, который преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости. Обычно находится на малой (меньшей) оси.
Ремень
Обычно несколько проводов, связанных вместе для подачи питания и / или передачи сигналов к / от устройств. Например, двигатели робота подключены к контроллеру через жгут проводов.
Опасное движение
Непреднамеренное / неожиданное движение робота, которое может привести к травме.
Удерживать
Остановка всех движений робота во время его последовательности, при которой на роботе сохраняется некоторая мощность. Например, выполнение программы останавливается, однако питание серводвигателей остается включенным, если требуется перезапуск.
Исходное положение
Известное и фиксированное положение на основной оси координат манипулятора, где он останавливается, или в указанном нулевом положении для каждой оси.Это положение уникально для каждой модели манипулятора. На роботах Motoman® есть индикаторные метки, которые показывают исходное положение для соответствующей оси.
МЭК
Международная электротехническая комиссия
Индуктивный датчик
Класс датчиков приближения, который имеет половину ферритового сердечника, катушка которого является частью цепи генератора. Когда металлический объект входит в это поле, в какой-то момент объект поглощает достаточно энергии из поля, чтобы заставить осциллятор перестать колебаться.Это означает, что объект присутствует в заданной близости. См. Датчик приближения.
Промышленный робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специализированных устройств посредством переменных запрограммированных движений для выполнения множества задач (R15.06). Основные компоненты: одна или несколько рук, которые могут двигаться в нескольких направлениях, манипулятор и компьютерный контроллер, который дает подробные инструкции по перемещению.
ИНФОРМ
Язык программирования роботов для роботов Yaskawa. Язык ИНФОРМ позволяет пользователю робота: инструктировать робота использовать его основные возможности для выполнения определенного набора ожиданий, а также описывать роботу через определение параметров и условий, какие ожидания возникают в определенных ситуациях или сценариях. Проще говоря, язык программирования INFORM позволяет пользователю указывать роботу, что делать, когда это делать, где это делать и как это делать.
Устройства ввода
Разнообразие устройств, позволяющих взаимодействовать между человеком и машиной. Это позволяет человеку программировать, управлять и моделировать робота. К таким устройствам относятся пульт для программирования, компьютерные клавиатуры, мышь, джойстики, кнопки, панель оператора, тумба оператора и т. Д.
Инструкция
Строка программного кода, вызывающая действие системного контроллера. См. Командное положение.
Цикл команд
Время, которое требуется циклу системы контроллера робота для декодирования команды или инструкции перед ее выполнением.Программисты-роботы должны очень внимательно анализировать цикл команд, чтобы обеспечить быструю и правильную реакцию на изменяющиеся команды.
Интегрировать
Чтобы объединить разные подсистемы, такие как роботы и другие устройства автоматизации, или, по крайней мере, разные версии подсистем в одной оболочке управления.
Интегратор
Компания, предоставляющая услуги с добавленной стоимостью, результатом которых является создание решений автоматизации путем объединения робота и другого оборудования автоматизации и управления для создания решения автоматизации для конечных пользователей.
Интеллектуальный робот
Робот, который можно запрограммировать на выбор производительности в зависимости от сенсорных входов с минимальной или нулевой помощью со стороны человека. См. Робот.
Зона помех
Зона помех — это функция, которая предотвращает помехи между несколькими манипуляторами или манипулятором и периферийным устройством. Области можно настроить до 64 областей. Три типа методов использования каждой области интерференции: кубическая интерференция, вне кубической области и осевая интерференция.
Интерполяция
Метод создания путей к конечным точкам. В общем, для задания движения несколько узловых точек определяются до того, как все промежуточные положения между ними вычисляются с помощью математической интерполяции. Таким образом, используемый алгоритм интерполяции существенно влияет на качество движения.
ISO
Международная организация по стандартизации
ISO 10218-1 Роботы и роботизированные устройства — Требования безопасности для промышленных роботов — Часть 1: Роботы
Специализированная спецификация безопасности робота, которая касается требований производителя, функциональности, требуемых характеристик безопасности, опасностей, защитных мер и документации для самого робота.
ISO 10218-2 Роботы и роботизированные устройства — Требования безопасности для промышленных роботов — Часть 2: Роботизированные системы и интеграция
Сопутствующий документ ISO 10218-1. Эта спецификация безопасности представляет собой руководство как для конечных пользователей, так и для интеграторов роботов в части безопасного проектирования, установки и ввода в эксплуатацию робототехнических систем, а также рекомендуемых процедур, мер безопасности и информации, необходимой для использования.
ISO TS 15066 (ANSI RIA 15.606): Роботы и роботизированные устройства — Коллаборативные роботы
Предоставляет подробные инструкции, отсутствующие в ISO 10218, части 1 или 2, по безопасному использованию промышленных роботов, работающих совместно.
Матрица Якоби
Матрица Якоби связывает скорости изменения совместных значений со скоростью изменения координат конечных точек. По сути, это набор алгоритмов вычислений, которые обрабатываются для управления позиционированием робота.
РАБОТА
JOB — это название Yaskawa программы для роботов, созданной с использованием языка программирования роботов INFORM компании Yaskawa. Обычно задание состоит из инструкций, которые сообщают контроллеру робота, что делать, и данных, которые программа использует во время работы.
Шарнир
Часть системы манипулятора, которая обеспечивает степень свободы вращения и / или поступательного перемещения звена рабочего органа.
Совместное интерполированное движение
Метод координации движения суставов, при котором все суставы достигают желаемого места одновременно. Этот метод сервоуправления обеспечивает предсказуемый путь независимо от скорости и обеспечивает самое быстрое время цикла захвата и размещения для конкретного движения.
Тип шарнира
Тип совместного движения, также известный как двухточечное движение, представляет собой метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение непосредственно в заданное положение, так что все оси достигают этого положения одновременно. Хотя путь предсказуем, он не будет линейным.
Совместное пространство
а. Совместное пространство (или совместные координаты) — это просто метод определения положения робота с точки зрения значения каждой оси, а не положения TCP.Например, исходное положение робота часто определяется в Joint Space, поскольку каждая ось находится под углом 0 градусов.
б. Набор совместных позиций.
Соединения
Части манипулятора робота, которые действительно сгибаются или двигаются.
Кинематика
Связь между движением конечной точки робота и движением суставов. Для декартового робота это набор простых линейных функций (линейные дорожки, которые могут быть расположены в направлениях X, Y, Z), для вращающейся топологии (шарниры, которые вращаются), однако кинематика намного сложнее, включая сложные комбинации тригонометрии. функции.Кинематика руки обычно делится на прямое и обратное решения.
Захват ковша
Конечный эффектор, который действует как совок. Он обычно используется для сбора жидкости, переноса ее в форму и заливки жидкости в форму. Обычно используется для работы с расплавленным металлом в опасных условиях. См. «Концевой эффектор».
Лазер
Акроним от «Усиление света за счет вынужденного излучения». Устройство, которое производит когерентный монохроматический луч света, который является чрезвычайно узким и сфокусированным, но все же находится в пределах видимого светового спектра.Обычно он используется в качестве бесконтактного датчика для роботов. Роботизированные приложения включают: определение расстояния, определение точного местоположения, картографирование поверхности, сканирование штрих-кода, резку, сварку и т. Д.
Линейное движение с интерполяцией
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение в скоординированном движении так, чтобы все оси приходили в позицию одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Линейный тип движения
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение в скоординированном движении так, чтобы все оси приходили в позицию одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Ссылка
Жесткая часть манипулятора, соединяющая соседние суставы.
звеньев
Статический материал, соединяющий суставы руки вместе.Тем самым образуется кинематическая цепочка. В человеческом теле звеньями являются кости.
Время цикла нагрузки
Термин технологического процесса производственной или сборочной линии, который описывает полное время, необходимое для выгрузки последней заготовки и загрузки следующей.
Магнитные извещатели
Датчики роботов, которые могут определять присутствие ферромагнитного материала. Твердотельные детекторы с соответствующим усилением и обработкой могут обнаруживать металлический объект с высокой степенью точности.См. Датчик.
Манипулятор
Машина или роботизированный механизм, который обычно состоит из серии сегментов (соединенных или скользящих друг относительно друга) с целью захвата и / или перемещения объектов (частей или инструментов), обычно с несколькими степенями свободы. Управление манипулятором может осуществляться оператором, программируемым электронным контроллером или любой логической системой (например, кулачковым устройством, проводным и т. Д.) (ISO 8373)
См. Руку, запястье и рабочий орган
Ручной режим
См. Режим обучения.
Погрузочно-разгрузочные работы
Процесс, с помощью которого промышленный робот-манипулятор переносит материалы из одного места в другое.
Робот для обработки материалов
Робот, спроектированный и запрограммированный таким образом, чтобы он мог обрабатывать, резать, формировать или изменять форму, функцию или свойства материалов, с которыми он работает, между моментом, когда материалы впервые схвачены, и временем их выпуска в производственный процесс.
Функция сдвига зеркала
С помощью функции зеркального сдвига задание преобразуется в задание, в котором траектория симметрична пути исходного задания.Это преобразование может быть выполнено для указанной координаты из координат X-Y, X-Z или Y-Z координат робота и координат пользователя. Функция зеркального смещения подразделяется на следующие три: функция импульсного зеркального смещения, функция зеркального смещения координат робота и функция зеркального смещения пользовательских координат. (см. рисунок справа)
Переключатель режима
В соответствии со стандартами безопасности промышленный робот имеет три различных режима работы. Это обучение (также называемое ручным), воспроизведение (также называемое автоматическим) и дистанционное управление.Переключение между этими режимами осуществляется с помощью переключателя с ключом на подвесном пульте обучения и называется переключателем режима.
Модульность
Свойство гибкости встроено в робота и систему управления путем сборки отдельных узлов, которые можно легко соединить или скомпоновать с другими частями или узлами.
Модуль
Автономный компонент пакета. Этот компонент может содержать подкомпоненты, известные как подмодули.
Ось движения
Линия, определяющая ось движения линейного или поворотного сегмента манипулятора.
Двигатель
См. Серводвигатель.
Отключение звука
При тестировании программы робота отключение любых устройств защиты от присутствия во время полного цикла робота или его части.
Программирование в автономном режиме
Метод программирования, при котором целевая программа определяется на устройствах или компьютерах отдельно от робота для последующего ввода информации для программирования роботу. (ISO 8373) б.Средство программирования робота во время его работы. Это становится важным при производстве и производстве сборочных линий из-за сохранения высокой производительности, пока робот программируется для других задач.
Оператор
Лицо, уполномоченное запускать, контролировать и останавливать запланированную продуктивную работу робота или роботизированной системы. Оператор также может взаимодействовать с роботом для производственных целей. (R15.06)
Оптический кодировщик
Датчик обнаружения, который измеряет линейное или вращательное движение, обнаруживая движение маркировки мимо фиксированного луча света.Его можно использовать для подсчета оборотов, идентификации деталей и т. Д.
Оптические датчики приближения
Датчики роботов, которые измеряют видимый или невидимый свет, отраженный от объекта, для определения расстояния. Лазеры используются для большей точности.
Ориентация
Угол, образованный большой осью объекта относительно базовой оси. Он должен быть определен относительно трехмерной системы координат. Угловое положение объекта относительно системы отсчета робота.См. Roll, Pitch и Yaw.
Паллетирование
Организованный процесс штабелирования пакетов (т. Е. Ящиков, пакетов, контейнеров и т. Д.) На поддоне.
Функция PAM — регулировка положения вручную
Регулировка положения вручную позволяет регулировать положение с помощью простых операций, наблюдая за движением манипулятора и без остановки манипулятора. Позиции можно регулировать как в режиме обучения, так и в режиме воспроизведения.
Функция параллельного смещения
Параллельный сдвиг относится к смещению объекта из фиксированного положения таким образом, что все точки внутри объекта перемещаются на равное расстояние.В модели для параллельного смещения, показанной ниже, значение смещения может быть определено как расстояние L (трехмерное координатное смещение). Функция параллельного смещения имеет отношение к фактической работе манипулятора, поскольку ее можно использовать для уменьшения объема работы, связанной с обучением, путем смещения обученного пути (или положения). В примере на рисунке ниже обученная позиция A сдвигается с шагом на расстояние L (на самом деле это трехмерное смещение XYZ, которое может распознать робот).
Путь
Непрерывное геометрическое место позиций (или точек в трехмерном пространстве), пересекаемое центральной точкой инструмента и описываемое в указанной системе координат. (R15.05-2)
Полезная нагрузка — максимум
Максимальная масса, которой робот может манипулировать при указанной скорости, ускорении / замедлении, расположении (смещении) центра тяжести и воспроизводимости при непрерывной работе в указанном рабочем пространстве. Максимальная полезная нагрузка указана в килограммах.(R15.05-2)
Кулон [Обучающий кулон]
Переносное устройство ввода, связанное с системой управления, с помощью которой можно программировать или перемещать робота. (ISO 8373) Это позволяет человеку-оператору занять наиболее удобное положение для наблюдения, контроля и записи желаемых движений в памяти робота.
Кулон обучающий
Отображение и запись положения и ориентации системы робота и / или манипулятора по мере того, как робот вручную поэтапно перемещается от начального состояния по пути к конечному целевому состоянию.Положение и ориентация каждой критической точки (суставы, база робота и т. Д.) Записываются и сохраняются в базе данных для каждой обученной позиции, через которую проходит робот на пути к своей конечной цели. Теперь робот может повторить путь самостоятельно, следуя пути, сохраненному в базе данных.
Уровень эффективности d (PLd)
Уровень эффективности (PL) ISO «d» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-7 до <10-6.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды. Это минимальный уровень эффективности, указанный в ISO 10218-2, раздел 5.2.2, если оценка риска не позволит использовать более низкое значение.
Уровень эффективности e (PLe)
Уровень эффективности ISO (PL) «e» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-8 до <10-7.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды.
Цикл подбора и размещения
Время, необходимое манипулятору, чтобы поднять объект и поместить его в желаемое место, а затем вернуться в исходное положение. Это включает время во время фаз ускорения и замедления конкретной задачи. Движение робота контролируется из одной точки в пространстве в другую в системе движения «точка-точка» (PTP).Каждая точка запрограммирована в управляющую память робота, а затем воспроизводится во время рабочего цикла.
Задача по подбору и размещению
Повторяющаяся задача переноса детали, состоящая из действия подбора, за которым следует действие по размещению.
Точки защемления
Точка защемления — это любая точка, в которой человек или часть тела человека может оказаться зажатым между движущимися частями машины, или между движущейся и неподвижной частями машины, или между материалом и любой частью машины. .Точка защемления не должна приводить к травме конечности или части тела, хотя может привести к травме — она должна только защемить или ущипнуть человека, чтобы он не смог вырваться или вынуть защемленную часть из точки защемления.
Шаг
Вращение рабочего органа в вертикальной плоскости вокруг конца руки робота-манипулятора.
См. Roll and Yaw.
Режим воспроизведения
После того, как робот запрограммирован в режиме обучения, контроллер робота можно переключить в режим воспроизведения для выполнения программы робота.В режиме воспроизведения воспроизводится программа робота. Это режим, в котором роботы используются в производстве.
Воспроизведение
Воспроизведение — это операция, при которой воспроизводится обученное задание. Эта функция используется, чтобы решить, где возобновить воспроизведение при запуске операции после приостановки воспроизведения и перемещения курсора или выбора других заданий. 0: запускает операцию, когда курсор находится в задании, отображаемом в данный момент. 1: Появится окно продолжения воспроизведения.Выберите «ДА», и воспроизведение возобновится в том месте, где находился курсор, когда воспроизведение было приостановлено. Если выбрано «НЕТ», воспроизведение возобновляется с того места, где находится курсор в задании, отображаемом в данный момент. Режимы Включите пульт программирования: PLAY — задание запускается кнопкой [СТАРТ] на пульте программирования, а задание REMOTE запускается периферийным устройством (внешний пусковой вход).
Точка-точка
Движение манипулятора, в котором задано ограниченное количество точек на прогнозируемой траектории движения.Манипулятор перемещается от точки к точке, а не по непрерывной плавной траектории.
Поза
Альтернативный термин для конфигурации робота, который описывает линейное и угловое положение. Линейное положение включает азимут, высоту и дальность до объекта. Угловое положение включает в себя крен, тангаж и рыскание объекта. См. Roll, Pitch и Yaw.
Позиция
Определение местоположения объекта в трехмерном пространстве, обычно определяемое трехмерной системой координат с использованием координат X, Y и Z.
Уровень позиции
Уровень положения — это степень приближения манипулятора к запрограммированному положению. Уровень положения может быть добавлен к командам перемещения MOVJ (совместная интерполяция) и MOVL (линейная интерполяция). Если уровень положения не установлен, точность зависит от скорости работы. Установка соответствующего уровня перемещает манипулятор по траектории, подходящей для окружающих условий и обрабатываемой детали. (см. рисунок справа)
Переменные положения
Переменные положения используются в программе робота (JOB) для определения местоположения в трехмерном пространстве, обычно определяемого трехмерной системой координат с использованием координат X, Y и Z.Поскольку это переменная, значение может меняться в зависимости от условий или информации, переданной в задание.
Ограничение мощности и усилия (PFL)
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка рисков должна использоваться для определения необходимости дополнительных мер безопасности для снижения рисков в роботизированной системе.
Устройство защиты от присутствия
Устройство, разработанное, сконструированное и установленное для создания сенсорного поля для обнаружения вторжения в такое поле людьми, роботами или объектами. См. Датчик.
Программируемый логический контроллер (ПЛК)
Твердотельная система управления, которая имеет программируемую пользователем память для хранения инструкций для реализации определенных функций, таких как: логика управления вводом-выводом, синхронизация, счетная арифметика и обработка данных.ПЛК состоит из центрального процессора, интерфейса ввода / вывода, памяти и устройства программирования, в котором обычно используются эквивалентные символы реле. ПЛК специально разработан как промышленная система управления, которая может выполнять функции, эквивалентные релейной панели или проводной твердотельной логической системе управления, и может быть интегрирована в систему управления роботом.
Программируемый робот
Функция, позволяющая проинструктировать робота выполнить последовательность шагов, а затем выполнять эту последовательность повторяющимся образом.Затем его можно перепрограммировать для выполнения другой последовательности шагов, если это необходимо.
Датчик приближения
Бесконтактное сенсорное устройство, используемое для определения, когда объекты находятся на небольшом расстоянии, и оно может определять расстояние до объекта. Несколько типов включают: радиочастотный, магнитный мост, ультразвуковой и фотоэлектрический. Обычно используется для: высокоскоростного счета, обнаружения металлических предметов, контроля уровня, считывания кодовых меток и концевых выключателей. См. Индуктивный датчик.
Координаты импульса
Роботы Yaskawa определяют положение осей шарниров робота в градусах для поворотных шарниров.Импульс — это еще один способ указать положение сустава робота, и он используется при подсчете импульсов энкодера двигателя робота.
Обеспечение качества (ОК)
Описывает методы, политику и процедуры, необходимые для проведения тестирования обеспечения качества во время проектирования, производства и доставки этапов создания, перепрограммирования или обслуживания роботов.
Досягаемость: Объем пространства (конверт), которого может достичь рабочий орган робота, по крайней мере, в одной ориентации.
Квазистатический зажим
Тип контакта между человеком и частью робототехнической системы, при котором часть тела может быть зажата между подвижной частью роботизированной системы и другой неподвижной или подвижной частью роботизированной ячейки
Вылет
Объем пространства (оболочки), которого может достичь рабочий орган робота хотя бы в одной ориентации.
Система реального времени
Компьютерная система, в которой компьютер должен выполнять свои задачи в рамках временных ограничений некоторого процесса одновременно с системой, которой он помогает. Компьютер обрабатывает системные данные (входные данные) от датчиков с целью мониторинга и вычисления параметров (выходов) управления системой, необходимых для правильной работы системы или процесса. От компьютера требуется, чтобы он выполнял свою работу достаточно быстро, чтобы не отставать от оператора, взаимодействующего с ним через оконечное устройство (например, экран или клавиатуру).Оператор, взаимодействующий с компьютером, имеет возможность доступа, поиска и хранения через систему управления базой данных. Доступ к системе позволяет оператору вмешиваться и изменять работу системы.
Робот для воспроизведения записи
Манипулятор, для которого критические точки вдоль желаемых траекторий сохраняются последовательно путем записи фактических значений кодеров положения суставов робота, когда он перемещается под операционным управлением. Для выполнения задачи эти точки воспроизводятся в сервосистеме робота.См. Сервосистема.
Робот с прямоугольными координатами
Робот, рука манипулятора которого движется линейными движениями по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Рабочий конверт.
Надежность
Вероятность или процент времени, в течение которого устройство будет работать без сбоев в течение определенного периода времени или объема использования (R15.02). Также называется: время безотказной работы робота или среднее время наработки на отказ (MTBF).
Восстановленное
Для обновления или модификации роботов в соответствии с пересмотренными спецификациями производителя. (R15.06)
Удаленный режим
Удаленный режим — это тип режима воспроизведения, в котором автоматическое выполнение программы робота инициируется с внешнего устройства (а не с обучающего пульта). В этом режиме использование обучающего пульта отключено.
Повторяемость
Мера того, насколько близко рука может повторно занять заданное положение.Например: после того, как манипулятор вручную помещен в определенное место, и это местоположение определено роботом, повторяемость определяет, насколько точно манипулятор может вернуться в это точное местоположение. Степень разрешения в системе управления роботом определяет повторяемость. В общем, воспроизводимость руки никогда не может быть лучше, чем ее разрешение. См. «Обучение и точность».
Разрешение
Количество шарнирного движения робота, необходимое для изменения положения на один счет.Хотя разрешение каждого датчика совместной обратной связи обычно является постоянным, разрешение конечной точки в мировых координатах не является постоянным для поворотных рычагов из-за нелинейности кинематики рычага.
Поворотный шарнир
Суставы робота, способные к вращательному движению.
Оценка рисков
Процесс оценки предполагаемого использования машины или системы на предмет прогнозируемых опасностей и последующего определения уровня риска, связанного с идентифицированными задачами.
Снижение рисков
Вторичный шаг в процессе оценки риска, который включает снижение уровня риска для идентифицированных задач путем применения мер по снижению риска для устранения или уменьшения опасностей.
Робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материала, деталей, инструментов или определенных устройств посредством переменных запрограммированных движений для выполнения множества задач. Общие элементы, из которых состоит робот: контроллер, манипулятор и рабочий орган.См. Манипулятор, Контроллер и Рабочий орган.
Система координат робота
Система координат робота определяется в базовой оси робота, а точки в системе координат робота будут относиться к базе робота. Обратите внимание, что по умолчанию базовая система координат и система координат робота одинаковы. (см. рисунок справа)
Робот-интегратор
См. Интегратор.
Язык программирования роботов
Интерфейс между человеком-пользователем и роботом, который связывает человеческие команды с роботом.
Робот, контролирующий пределы диапазона
Следит за тем, чтобы рука манипулятора или его инструмент находились в обозначенной зоне безопасности
Моделирование роботов
Метод имитации и прогнозирования поведения и работы роботизированной системы на основе модели (например, компьютерной графики) физической системы. (R15.07)
Рулон
Вращение концевого эффектора робота в плоскости, перпендикулярной концу руки манипулятора.См. Pitch and Yaw.
Поворотный шарнир
Сустав, который скручивается, качается или изгибается вокруг оси.
Поворотный векторный привод (RV)
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси. См. Cyclo Drive и Harmonic Drive.
Вращательное движение
Сустав, который скручивается, качается или изгибается вокруг оси. Примером этого является локоть человеческой руки.
Гарантия
Барьерное ограждение, устройство или защитная процедура, предназначенные для защиты персонала. (R15.06)
Уровень полноты безопасности
Уровень полноты безопасности (SIL) — это метод IEC для определения уровня производительности системы безопасности. SIL 2 соответствует уровню эффективности ISO «d», а SIL 3 соответствует уровню эффективности ISO «e». ISO 10218 допускает использование того и другого.
Логическая схема безопасности
Логическая схема безопасности контролирует критически важные для безопасности внешние устройства, такие как световые завесы и генерируемые FSU сигналы.Логическая схема безопасности программируется через интуитивно понятный пользовательский интерфейс, поддерживаемый подвесным пультом программирования Yaskawa. Это позволяет настроить логические операции, такие как остановка манипулятора или выдача сигнала, если сервоприводы включены.
Остановка с контролем безопасности
Совместная функция, разработанная для обеспечения безопасного взаимодействия человека и робота. Только когда движение робота прекратится, безопасность человека перейдет в рабочее пространство для совместной работы. Сервоприводы могут оставаться под напряжением в соответствии с остановкой категории 2 в соответствии с ISO 10218-1: 2011, 5.4. Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Робот SCARA
Цилиндрический робот, имеющий два параллельных шарнирных соединения (горизонтально шарнирно сочлененных) и обеспечивающий податливость в одной выбранной плоскости. (ISO 8373) Примечание: SCARA является производным от селективно совместимой руки для роботизированной сборки
Вторая исходная позиция
Помимо «исходного положения» манипулятора, второе исходное положение можно настроить как контрольную точку для абсолютных данных.Начальное значение второго исходного положения — это исходное положение (где все оси находятся на импульсе 0). Вторую исходную позицию можно изменить.
Режим безопасности
Уровни режимов оператора на контроллерах роботов Yaskawa включают в себя: режим работы, режим редактирования, режим управления, режим безопасности и режим одноразового управления.
Датчик
Инструменты, используемые в качестве устройств ввода для роботов, которые позволяют ему определять аспекты, касающиеся окружающей среды робота, а также собственное позиционирование робота.Датчики реагируют на физические стимулы (такие как тепло, свет, звук, давление, магнетизм и движение) и передают результирующий сигнал или данные для измерения, управления или того и другого. (R15.06)
Сенсорная обратная связь
Переменные данные, измеряемые датчиками и передаваемые на контроллер в замкнутой системе. Если контроллер получает обратную связь, выходящую за пределы допустимого диапазона, значит, произошла ошибка. Контроллер отправляет роботу сигнал об ошибке.Робот вносит необходимые корректировки в соответствии с сигналом ошибки.
Сервоуправление
Процесс, с помощью которого система управления роботом проверяет, соответствует ли достигнутая поза робота позе, заданной при планировании движения, с требуемыми характеристиками и критериями безопасности. (ISO 8373)
Серводвигатель
Электроэнергетический механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию в движение робота) (R15.07). Двигатель реагирует на сигнал, полученный от системы управления, и часто включает энкодер для обеспечения обратной связи с контуром управления.
Сервопривод
Электроэнергетический механизм переменного тока, управляемый с помощью логики для преобразования энергии источника питания в форме синусоидальной волны в квадратную форму с широтно-импульсной модуляцией (ШИМ), подаваемую на двигатели для управления двигателем: скорость, направление, ускорение, замедление. и контроль торможения.
Робот с сервоприводом
Управление роботом с помощью сервосистемы с замкнутым контуром, в которой положение оси робота измеряется устройствами обратной связи и сохраняется в памяти контроллера.См. Система с обратной связью и Сервосистема.
Сервосистема
Система, в которой контроллер выдает команды на двигатели, двигатели приводят в движение рычаг, а датчик энкодера измеряет вращательные движения двигателя и сигнализирует о величине движения обратно контроллеру. Этот процесс продолжается много раз в секунду, пока рука не переместится в требуемую точку. См. Сервоуправляемый робот
Функция обнаружения удара
Обнаружение удара — это функция, поддерживаемая контроллером робота Yaskawa, которая снижает влияние столкновения робота путем остановки манипулятора без какого-либо внешнего датчика, когда инструмент или манипулятор сталкиваются с периферийным устройством.
Плечо
Первую или вторую ось робота иногда называют осью плеча, поскольку она чем-то напоминает человеческое плечо. Это часто используется при описании гуманоидных систем или систем с двумя руками, таких как Yaskawa Motoman® SDA10D.
SIL
См. Уровень полноты безопасности
Моделирование
Графическая компьютерная программа, представляющая робота и его окружающую среду, которая имитирует поведение робота во время имитации запуска робота.Это используется для определения поведения робота в определенных ситуациях, прежде чем фактически дать команду роботу выполнить такие задачи. Рассматриваются следующие элементы моделирования: 3D-моделирование окружающей среды, эмуляция кинематики, эмуляция планирования пути и моделирование датчиков. См. Сенсор, Прямая кинематика и Робот.
Сингулярность
Конфигурация, в которой два шарнира манипулятора робота становятся коаксиальными (выровненными по общей оси). В особой конфигурации плавное следование по траектории обычно невозможно, и робот может потерять управление.Термин происходит от поведения матрицы Якоби, которая становится сингулярной (т. Е. Не имеет обратной) в этих конфигурациях.
SLURBT
SLURBT — это термины, которые Yaskawa Motoman использует для описания каждой оси робота для удобства. Определение каждого значения следующее:
S — качели или вертлюги
L — нижний рычаг
U — верхняя часть руки
R — повернуть на
B — Колено
Т — Твист
Функция настройки мягкого ограничения
Функция настройки Softlimit — это функция для установки диапазона ограничения перемещения оси движения манипулятора в программном обеспечении.
Контроль скорости и разделения
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Сплайн
Гладкая непрерывная функция, используемая для аппроксимации набора функций, которые однозначно определены на наборе подинтервалов. Аппроксимирующая функция и набор аппроксимируемых функций пересекаются в достаточном количестве точек, чтобы обеспечить высокую степень точности приближения. Назначение плавной функции — позволить роботу-манипулятору выполнить задачу без рывков.
Spline Motion Type
Расчетный путь, который выполняет робот, который может иметь параболическую форму.Сплайновое движение может также создавать кривую произвольной формы со смесью круглых и параболических форм.
Системный интегратор
См. Интегратор.
Обучение
Чтобы запрограммировать руку манипулятора, вручную направляя ее через серию движений и записывая положение в памяти контроллера робота для воспроизведения.
Блокировка обучения
Пока установлена блокировка обучения, режим работы привязан к режиму обучения, и машины не могут воспроизводиться ни с помощью [СТАРТ], ни с внешнего входа.В целях безопасности всегда устанавливайте переключатель режима в положение «ОБУЧЕНИЕ» перед началом обучения.
Режим обучения
Режим контроллера робота, в котором робот-манипулятор программируется путем ручного управления им через серию движений и записи положения в память контроллера робота для воспроизведения. Промышленные роботы, у которых нет активной функции ограничения мощности и усилия, требуют использования трехпозиционного переключателя включения в режиме обучения.
Подвеска Teach
Портативный блок управления, который используется оператором для удаленного управления роботом при выполнении его задач.Движения записываются системой управления роботом для последующего воспроизведения. Современные промышленные роботы поставляются с подвесками для программирования, которые не только позволяют обучать роботов, но также поддерживают полнофункциональное программирование роботов и безопасный пользовательский интерфейс.
Окно обучения
Окно обучения — это экран пользовательского интерфейса на пульте программирования. Это окно содержит окно СОДЕРЖАНИЕ ЗАДАНИЯ, и в этом окне проводится обучение. Окно СОДЕРЖАНИЕ ЗАДАНИЯ содержит следующие элементы: номера строк, курсор, инструкции, дополнительные элементы, комментарии и т. Д.
Поперечная балка
Система обнаружения объектов, используемая в системе датчиков изображения робота. Точно сфокусированный луч света закреплен на одном конце, а детектор — на другом. Когда луч света прерывается, объект ощущается.
Функция измерения времени
Функция измерения времени измеряет время выполнения указанного раздела в задании или время вывода указанного сигнала.
Инструмент
Термин, используемый в широком смысле для определения рабочего устройства, установленного на конце манипулятора робота, такого как рука, захват, сварочная горелка, отвертка и т. Д.См. «Рука», «Захват» и «Рабочий орган».
Инструмент и рука Помехи
В системе с одним контроллером и несколькими манипуляторами можно использовать функцию проверки вмешательства инструмента и рычага для обнаружения возможных помех и предотвращения столкновения во время работы. Можно проверить следующие три шаблона:
Плечо против руки
Рычаг против инструмента
Инструмент против инструмента
Интерференция проверяется с помощью цилиндра, который немного больше, чем рычаг или инструмент.На обоих концах цилиндра помещается сфера. Если цилиндр и сферы одного манипулятора во время движения контактируют с цилиндрами другого манипулятора, манипуляторы останавливаются из-за обнаружения помех.
Центр инструмента (TCP)
Центральная точка инструмента (TCP) определяет вершину текущего инструмента, как определено относительно фланца инструмента. Например, для сварочного робота TCP обычно определяется на конце сварочного пистолета. После определения и настройки TCP движение робота будет определено относительно этого кадра (т.е., вращение в направлении Rx вызовет вращение вокруг оси X, и позиции будут обучаться в этом кадре.
Контрольная точка инструмента
См. Центр инструмента
Координаты инструмента
Когда инструмент, прикрепленный к роботу, перемещается, его система координат инструмента движется вместе с фиксированной системой координат, например мировыми координатами. Как правило, координаты инструмента не совпадают с мировыми координатами XYZ.
Рама для инструментов
Система координат, прикрепленная к рабочему органу робота (относительно базовой рамы).
Датчик касания
Чувствительное устройство, которое иногда используется с рукой или захватом робота, которое определяет физический контакт с объектом, тем самым давая роботу искусственное ощущение прикосновения. Датчики реагируют на контактные силы, возникающие между ними и твердыми предметами.
Построение траектории (расчет)
Вычисление функций движения, которые позволяют плавно контролировать движение суставов.
Преобразователь
Устройство, преобразующее энергию из одной формы в другую.Обычно это устройство, преобразующее входной сигнал в выходной сигнал другой формы. Его также можно рассматривать как устройство, которое преобразует статические сигналы, обнаруженные в окружающей среде (например, давление), в электрический сигнал, который отправляется в систему управления роботом.
Время работы
Период времени, в течение которого робот или производственная линия работают или готовы к работе, в отличие от времени простоя.
Настройка координат пользователя
Координаты пользователя определяются тремя точками, которые были обучены манипулятору с помощью осевых операций.Этими тремя определяющими точками являются ORG, XX и XY, как показано на диаграмме ниже. Эти три точки позиционных данных регистрируются в пользовательском файле координат. ORG — это исходное положение, а XX — точка на оси X. XY — это точка со стороны оси Y от пользовательских координат, которые были обучены, а направления осей Y и Z определяются точкой XY.
Пользовательская система координат
Пользовательская система координат — это любая контрольная точка, которую пользователь определил для своего приложения.Он часто прикрепляется к объекту, например к поддону, и позволяет пользователю обучать точкам относительно этого объекта. Например, набор положений может быть обучен относительно пользовательской системы координат, прикрепленной к поддону, а затем легко перенесен в другую пользовательскую систему координат на другом поддоне. Это позволяет эффективно повторно использовать позиции. См. Также «Настройка координат пользователя
Ручной вакуумный стакан
Конечный эффектор для руки робота, который используется для захвата объектов легкого и среднего веса с помощью всасывания для манипуляций.К таким предметам может относиться стекло, пластик; и т. д. Обычно используется из-за его достоинств, заключающихся в уменьшении скольжения предмета, когда он находится в пределах досягаемости вакуумной чашки. См. «Концевой эффектор».
Система визуального контроля
Система управления, в которой траектория робота изменяется в ответ на ввод от системы технического зрения.
Датчик технического зрения
Датчик, который определяет форму, местоположение, ориентацию или размеры объекта с помощью визуальной обратной связи, например, телекамеры.
Рабочий пакет
Набор всех точек, до которых манипулятор может добраться без вторжения. Иногда форма рабочего пространства и положение самого манипулятора могут ограничивать рабочий диапазон.
Рабочий конверт (космос)
Объем пространства, в котором робот может выполнять поставленные задачи.
Работа в исходном положении
Исходное рабочее положение — это ориентир для операций с манипулятором.Это предотвращает взаимодействие с периферийным устройством, гарантируя, что манипулятор всегда находится в пределах установленного диапазона в качестве предварительного условия для таких операций, как запуск линии. Манипулятор можно переместить в заданное рабочее исходное положение с помощью пульта управления или ввода сигнала с внешнего устройства. Когда манипулятор находится в непосредственной близости от исходного рабочего положения, включается сигнал рабочего исходного положения.
Заготовка
Любая деталь, которая обрабатывается, совершенствуется или изготавливается до того, как она станет готовым продуктом.
Рабочее пространство
Объем пространства, в котором робот может выполнять поставленные задачи.
Мировые координаты
Справочная система координат, в которой рычаг манипулятора движется линейными движениями по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Прямоугольные координаты.
Мировая модель
Трехмерное представление рабочей среды робота, включая объекты, их положение и ориентацию в этой среде, которое хранится в памяти робота.Поскольку объекты обнаруживаются в окружающей среде, система контроллера робота постоянно обновляет модель мира. Роботы используют эту модель мира, чтобы определять свои действия для выполнения поставленных задач.
Запястье
Набор поворотных шарниров между манипулятором и рабочим органом робота, которые позволяют ориентировать рабочий орган по отношению к обрабатываемой детали. В большинстве случаев запястье может иметь степени свободы, которые позволяют ему захватывать объект с ориентацией по крену, тангажу и рысканью.См. «Рука», «Рабочий орган», «Крен», «Шаг», «Рыскание» и «Деталь».
Запястье [вторичная ось]
Набор взаимосвязанных звеньев и механических соединений между рычагом и рабочим органом, который поддерживает, позиционирует и ориентирует рабочий орган. (ISO 8373)
Рыскание
Вращение рабочего органа в горизонтальной плоскости вокруг конца руки манипулятора. Боковое движение по оси. Смотрите Roll and Pitch.
Системы и решения для автоматизации складов
Склад играет важную роль в цепочке поставок.Являясь ключевым компонентом управления логистикой, ваш склад — это не просто вспомогательная операция, в которой хранятся товары, материалы или активы. Это важнейшее звено, необходимое для успеха большей цепочки поставок, с которой оно связано. Проблемы или задержки в работе склада могут возникнуть ниже по потоку, что повлияет на выставление счетов, денежный поток и удовлетворенность клиентов.
CyberCore Technologies предлагает отличный пример того, как правильное решение и план внедрения могут иметь большое влияние на операции в масштабе всего предприятия.
Поскольку неэффективные процессы могут иметь последующие последствия, это означает, что верно и обратное. Используя автоматизацию, можно передать повышение эффективности, полученное на складе, что приведет к улучшениям в остальной части организации и цепочки поставок.
За десятилетия управление складом превратилось в сложную науку. Технологии автоматизации используют эту базу знаний, чтобы позиционировать склад для повышения производительности, ускорения выполнения циклов цепочки поставок и поддержки роста компании.
Компании, внедряющие технологии автоматизации на своих складах, часто получают несколько из следующих преимуществ:
Автоматизация помогает сократить накладные расходы, обеспечивая экономию затрат, связанных с рабочей силой, оборудованием и техническим обслуживанием, а также увеличивает пропускную способность. Это также снижает расходы на потребление энергии, места для хранения и инциденты, связанные с безопасностью.
Автоматизация может повысить продуктивность каждого рабочего без увеличения штата, что, в свою очередь, увеличивает пропускную способность каждой смены.Делая работу вашей складской бригады проще и безопаснее, вы создаете более привлекательное место для работы — важный фактор на сегодняшнем рынке.
Автоматизация процессов, таких как сбор данных и транзакции инвентаризации, может помочь уменьшить потери инвентаря, усадку и неправильное размещение, а также повысить точность до 99,999%. Такой уровень управления запасами также означает меньшее количество ошибок при доставке. Это также способствует сокращению или устранению необходимости в промежуточной поддержке методологий JIT для выполнения заказов.
Автоматизация сокращает количество энергии, необходимой для работы ваших объектов, снижает затраты, отходы и использование земли, а также минимизирует воздействие вашего объекта на окружающую среду. Эти преимущества особенно важны для холодильных установок или помещений с регулируемой температурой или складов, которые работают с опасными отходами.
Теперь, когда мы поговорили о том, «что» и «почему» автоматизации склада, давайте рассмотрим «когда» и «как».
Когда вводить автоматизацию
К настоящему моменту вы можете спросить себя: «Звучит здорово, но , когда , я могу использовать автоматизацию на моем складе?»
По сути, автоматизация склада необходима, когда бремя обработки складских процессов вручную (с бумагой, электронными таблицами, племенными знаниями и т. Д.) превышает потребности организации. Когда это произойдет, вы можете испытать один или несколько из следующих симптомов:
- Ваши текущие процессы слишком трудоемки и требуют много времени
- Вы изо всех сил пытаетесь получить заказы вовремя
- Выполнение заказа неточное
- Вы увеличили количество сотрудников, чтобы проверить и перепроверить точность заказов
- Вы не можете доверять уровню своего инвентаря, потому что подсчет редко бывает правильным
- Ваше устаревшее решение требует слишком большого обслуживания
- Ваши клиенты недовольны, что бы вы ни делали
Звучит знакомо? Возможно, пришло время автоматизировать ваш склад.
Хорошая новость в том, что вы не единственный специалист по цепочке поставок, который ломает голову. Тысячи менеджеров складов и ИТ-специалистов решили те же проблемы, внедрив решения по автоматизации складских помещений.
Вы можете сделать то же самое.
Как автоматизировать склад
Автоматизация склада — это процесс «бег-обход-беги». Прежде чем переходить к системам AS / RS и автономным роботам, вам нужно начать с основ, а затем опираться на них.
Давайте начнем с первых шагов на пути к автоматизации склада:
1. Начните со сбора данных
Самой первой областью вашего склада, которую нужно автоматизировать, должен быть процесс сбора данных .
Традиционно данные собираются с помощью рукописных заметок на бумаге или путем ввода данных вручную или с изменением ключей. Эти данные затем сохраняются либо в цифровом виде, в электронной таблице или базе данных (например, в базе данных AS / 400), либо физически, в папке или удобном месте на складе, либо не хранятся вовсе. По состоянию на 2016 год почти 60% складов по-прежнему используют физические процессы в рабочем процессе управления запасами.
Однако точность сбора данных начинается с приема .
Когда партия продукта прибывает на прием, ваш сотрудник — назовем его «Принимающий Джо» — проверяет каждую коробку или элемент на поддоне, записывает или вводит артикулы и количества перед хранением в ящиках. Каждый раз, когда Приемник Джо вручную вводит номер SKU, количество или любую другую информацию, существует вероятность человеческой ошибки, такой как перестановка двух чисел.Эта ошибка затем усугубляется, поскольку неправильно собранные данные для этого материала складываются, передаются, собираются, упаковываются и затем отправляются.
Принимающий Джо устал от складирования коробок по несколько дней, в то время как неорганизованный склад пытается найти места для хранения нового продукта. Между тем, подсчет всего вручную означает, что он может допустить дорогостоящие ошибки.
В этом сценарии покупатель потенциально может получить совсем не тот продукт, потому что транспонированный артикул представляет собой другой товар, что инициирует дорогостоящий процесс возврата.Если клиент особенно недоволен, он может поделиться этим мнением с другими, испортив репутацию вашей компании (или компании-партнера) за плохое обслуживание клиентов.
Ура. Все потому, что Принимающий Джо по ошибке переставил два числа.
Теперь предположим, что Принимающий Джо обрабатывает 4000 единиц продукта каждый день. Даже при точности 99,5% эта очень небольшая погрешность приводит к 20 несовершенным транзакциям за рабочий день. Через год (250 рабочих дней) 0.Разрыв в 5% приводит к 5000 неверных записей инвентаря. Это не обязательно ошибка Джо в приеме, это просто естественное следствие выполнения повторяющихся задач вручную.
Предположим, Джо работает в принимающей команде с двумя другими людьми с сопоставимой производительностью. Теперь эти 20 неудачных транзакций увеличиваются до 15 000 в год. Умножьте эти 15000 на три местоположения, и теперь их предприятие ежегодно размещает на складе 45000 неправильно идентифицированных товаров, и все они могут быть потеряны, проданы дважды или устареют, потому что эти запасы не могут быть впоследствии обнаружены из-за неверных данных. .
Излишне говорить, что погрешность 0,5% может иметь огромное влияние на вашу работу. В более традиционных операциях, таких как розничные торговцы, которые выполняют прием, подсчет циклов и проверку запасов вручную, точность инвентаризации может составлять всего 60%, что отрицательно сказывается на последующей деятельности для остальной части бизнеса.
Принимающий Джо любит, как автоматизация сбора данных делает его работу проще, быстрее и точнее, а он становится более продуктивным.С помощью , автоматизирующего процесс сбора данных, мы исключаем возможность человеческой ошибки, тем самым снижая вероятность того, что продукт будет неправильно получен, сохранен, передан, отобран, упакован или отправлен покупателю.Автоматизация сбора данных включает внедрение системы, в которой информация о входящих грузах фиксируется с помощью сканера штрих-кода и передается через программное обеспечение в центральные хранилища данных, такие как база данных или система ERP.
Так как этот процесс захвата обходится без ручной записи, захваченные данные становятся более чистыми и значительно более точными — даже до 100%.
Современные решения для автоматизированного сбора данных продвигают процесс сбора данных на новый уровень, используя устройства сбора данных в виде беспроводных сканеров штрих-кода, карманных компьютеров или планшетов повышенной прочности.По-настоящему автоматизированное решение для мобильного сбора данных будет использовать независимое от устройства программное обеспечение для обеспечения двусторонней связи между этими мобильными КПК и базой данных или ERP. Данные также можно собирать из всех источников, таких как штрих-коды, RFID-метки, устройства промышленного Интернета вещей (IIoT), оборудование для физической автоматизации (карусели, вертикальные подъемники и т. Д.) И многое другое.
Эта экосистема сбора данных не только полностью исключает человеческую ошибку в процессе ввода данных, но и предоставляет менеджеру склада точные и высококачественные данные, которые используются при принятии решений в режиме реального времени относительно уровня запасов и производственных материалов или компонентов.
Просто автоматизируя этот процесс, весь склад, ЦОД и / или производственные операции могут работать с уровнем эффективности, невозможным в противном случае, — с положительным эффектом «просачивания вниз» для последующих операций.
Не делайте распространенной ошибки, пренебрегая автоматизацией сбора данных или ожидая, пока вы уже внедрите другие формы автоматизации, такие как WMS. Автоматизированный мобильный сбор данных должен стать первым шагом на пути к автоматизации склада.Опрос, проведенный Zebra, показал, что 90% специалистов по складскому хозяйству планировали использовать мобильные портативные устройства с доступом в реальном времени к своим данным о запасах к 2020 году, а это означает, что организации, еще не реализовавшие риск корпоративной мобильности, остались позади.
Штрихкодирование мобильного склада — идеальное решение для предприятий, только начинающих свой путь автоматизации. Мобильное кодирование на складе включает:
- Мобильный сбор данных для автоматизации данных, полученных с помощью сканеров штрих-кода
- Корпоративная мобильность, расширяющая ERP на корпоративные и потребительские мобильные устройства
- Гибкость и расширяемость, чтобы начать с малого и при необходимости расширять автоматизацию
С технологией мобильного штрих-кодирования складские и дистрибьюторские компании могут начать с автоматизации лишь нескольких ключевых процессов.Затем, когда будут реализованы преимущества, вы сможете расширить цифровую автоматизацию в новых областях, ускорив сокращение затрат и повышение производительности.
2. Получите контроль над своим инвентарем
Качество данных инвентаризации зависит от качества собираемых вами данных. Итак, теперь, когда вы убедились, что ваши данные будут собираться с максимальным качеством и точностью за счет автоматизации, пришло время использовать эти данные в системе управления запасами .
Автоматизация управления запасами обычно принимает форму системы управления запасами (IMS). Эта программная платформа дает возможность получить полную информацию о ваших запасах, когда они проходят через ваш склад. Хотя существует множество решений IMS, программное обеспечение, такое как ShipStation, больше предназначено для небольших розничных и онлайн-предприятий, в то время как корпоративные платформы, такие как RFgen, разрабатываются специально с учетом потребностей крупных или корпоративных компаний.
Мобильность и штрих-коды упрощают работу Putaway Mary. Каждая транзакция IMS обновляет другие бизнес-системы в режиме реального времени, обеспечивая видимость запасов в реальном времени.Программное обеспечениедля управления запасами по существу позволяет обновлять данные о продукте, полученные при получении, в режиме реального времени по мере того, как происходят складские операции. Например, Receiving Joe сканирует получаемые продукты, автоматически заполняя IMS данными. Затем он передает поддон Мэри, занимающейся приемкой на склад, и та сканирует корзину, в которой будут храниться запасы. Теперь система знает, где найти инвентарь и сколько в наличии в этих конкретных ящиках. Позже инвентарь можно перенести в новую корзину с другим набором сканирований.
Когда приходит время вытащить этот инвентарь для заказа, Сборщик Ларри имеет точное количество этого запаса. Сборщик Ларри выбирает элементы и количество и обновляет IMS с помощью своего портативного сканера. Опять же, эти транзакции обновляют систему в режиме реального времени. Упаковщик Джейн имеет нужный продукт в нужном количестве, который затем отправляется покупателю. Теперь менеджер склада может видеть, что из-за недавно извлеченных товаров уровень этого запаса упал ниже порога повторного заказа. Поскольку у менеджера точный подсчет, ему не нужно гадать или рисковать, не говоря уже о риске неудобного дефицита.
Программное обеспечениеIMS предлагает множество дополнительных преимуществ для повседневной работы склада:
- Значительно выше Точность инвентаризации
- Храните меньше запасов в наличии, сокращает накладные расходы
- Видимость запасов для поддержания оптимального уровня запасов
- Более быстрый сбор, упаковка, отгрузка и выполнение
- Автоматический подсчет циклов , которые занимают часы, а не недели
- Части или продукты питания отслеживаемость в соответствии с государственными постановлениями
- Простая выдача инвентаря, запчастей или материалов
Программное обеспечение инвентаризации также можно расширить или настроить для получения дополнительных функций:
- Сбор или отслеживание данных от других участников цепочки поставок, таких как глобальные номера предметов торговли (GTIN) и страна происхождения (COO).
- Добавьте Advanced Shipping Notification (ASN) от поставщика или экспедитора, чтобы ваши команды знали точное количество товаров, которое ожидается.
- Хранение и передача получил товар, не создавая неожиданных пробок или засоров.
- Добавьте License Plating , чтобы включить «группировку инвентаря» для интеллектуального управления группами товаров как единым целым, облегчая прием, складирование и передачу или непрерывное производство.
- Интегрируйтесь с программным обеспечением этикеток со штрих-кодами для печати новых или пользовательских штрих-кодов по запросу с мобильных устройств.
- Добавьте полевой мобильности , чтобы расширить управление запасами в полевые службы для полевого инвентаризации, товарно-материальных запасов, удаленного складирования и подтверждения доставки (DSD).
ПОДРОБНЕЕ об удаленном управлении складом »
Программное обеспечение для управления запасамидолжно быть сопряжено с автоматическим процессом сбора данных, в противном случае уровни ваших запасов станут неточными, что создаст те же проблемы, что и раньше. Например, сборщик Ларри может пойти в корзину только для того, чтобы обнаружить, что необходимые ему «под рукой» товары уже были отправлены в предыдущем заказе.На соседней полке он замечает корзину, полную пыльных микрочипов, которые с тех пор устарели и никуда не годятся. Когда он проверяет IMS, он обнаруживает, что корзины даже нет в системе. В обоих случаях деньги теряются из-за неверных или отсутствующих данных.
Как и в случае с Receiving Joe, неверные или отсутствующие данные инвентаризации могут дорого обойтись.
В идеале решение для сбора данных должно идти рука об руку с решением для управления запасами. Поставщики решений для цепочки поставок, такие как RFgen, предлагают комплексное решение, которое помогает автоматизировать сбор данных, приобретать мобильное оборудование предприятия и интегрировать эти системы с программным обеспечением для управления запасами и вашей базой данных или средой ERP для создания экосистемы разнонаправленной передачи данных.
Однако, если вы хотите сделать еще один шаг вперед в автоматизации складских процессов, чтобы получить дополнительную функциональность и эффективность, вы можете приобрести систему управления складом , WMS.
3. Внедрение системы управления складом (WMS)
Что такое WMS? Система управления складом , или WMS, — это программная платформа, которая берет на себя и автоматизирует внутреннюю складскую логистику для принятия интеллектуальных решений в режиме реального времени, которые направляют движения ваших рабочих по складу с максимальной эффективностью.Исследования ARC Advisory Group показывают, что решения WMS могут «предоставить единственное лучшее решение для снижения затрат, связанных с распространением, при одновременном улучшении обслуживания».
Подобно программному обеспечению для управления запасами, WMS помогает вам контролировать и отслеживать движение материалов на вашем складе или в распределительном центре, но с гораздо большей функциональностью и эксплуатационной гибкостью. В отличие от приложений для управления запасами, настоящее программное обеспечение WMS обеспечивает более высокий уровень контроля и использования ресурсов для перемещения и хранения продуктов на вашем складе и в ЦОД и вокруг него.
Также читайте: Получите лучшие в своем классе преимущества WMS за небольшую часть стоимости »
Первыми WMS были компьютерные приложения, которые обеспечивали простые функции хранения и определения местоположения. С первых дней существования WMS эти программы превратились либо в отдельные приложения, либо в расширение вашей системы планирования ресурсов предприятия (ERP), которая взаимодействует с вашей базой данных и другими складскими технологиями, такими как мобильные устройства, RFID-метки и робототехника.
Современная WMS возникла из осознания того, что сотрудники склада тратят значительную часть своего времени на прогулки. Сборщик Ларри может тратить 60% или более своего времени на поиск предметов — и это всего лишь одна задача. Ваша складская команда также тратит время на поездки туда и обратно во время приема, складирования, пополнения запасов, а также при загрузке грузовиков и выполнении заказов.
Добавьте к этому ежедневные задачи технического обслуживания, такие как поиск места для поступающих продуктов, перемещение запасов, очистка или реорганизация, и станет ясно, сколько существует возможностей потерять производительность.
Программное обеспечениедля управления складом упрощает выполнение этих трудоемких задач, направляя такие процессы, как комплектование, приемка на склад и пополнение запасов, по оптимизированным путям, которые исключают ненужное перемещение и минимизируют время, необходимое для выполнения каждого действия. В сочетании с возможностью направлять и проверять складские операции по мере их прохождения через склад, решения WMS могут обеспечить значительный выигрыш в эффективности, производительности и сокращении затрат.
Программное обеспечениедля управления складом обычно выпускается в двух формах: в виде отдельного решения или модуля ERP, такого как модуль Advanced Warehouse Management для JD Edwards или продукт SAP Extended Warehouse Management (SAP EWM).Хотя расширение существующей ERP может показаться привлекательным, обратите внимание, что эти модули, как правило, представляют собой тяжелые решения, наиболее подходящие для очень крупных корпоративных операций, которые приносят сотни миллионов, если не миллиарды, дохода ежегодно. Эти WMS-системы с модулями ERP обычно очень сложны, дороги и ресурсоемки в обслуживании. Помимо оплаты компонентов, лицензирования и настройки, вашей компании придется потратить деньги на время разработки и заработную плату для сотрудников ИТ-поддержки.
Для большинства компаний альтернатива WMS «Light» может быть более идеальной.«Легкие» решения WMS предлагают большую часть основных функций полной WMS, но без сложности, затрат или обслуживания. Такие продукты, как RFgen Warehouse Director, можно быстро развернуть, не вторгаясь в существующую инфраструктуру, и обеспечивают окупаемость в течение месяцев, а не лет. Например, компания Myers Tire Supply добилась значительных непрерывных операционных улучшений с использованием RFgen.
Технология WMS-Lite разумно направляет движения Пикера Ларри. В сочетании с мобильностью Picker Larry работает с максимальной эффективностью.
Независимо от вашего выбора, важно также иметь подробный план проекта, прежде чем двигаться дальше. Внедрение WMS может быть сложным и требует тесной интеграции с существующими складскими процессами и рабочими процессами. Ваш склад также должен оставаться в рабочем состоянии и работать на полной скорости, пока новая WMS тестируется, интегрируется и развертывается, пока ваша команда не получит возможность изучить новую систему. Как и любая форма управления изменениями, от эффективного плана зависит успех или неудача реализации.
Заключение
Автоматизация складов может помочь вам и вашему предприятию повысить уровень удовлетворенности клиентов до уровней, которые иначе были бы невозможны только благодаря работе, управляемой человеком. Автоматизация — это не только будущее складского хозяйства, но и символ современных складов, ЦОД и производственных операций.
Автоматизация складов бывает разных форм и размеров. Важно правильно выбрать типы автоматизации для индивидуальных нужд вашей компании. Хотя это не обязательно должно включать физическую автоматизацию с помощью роботов и автоматизированного погрузочно-разгрузочного оборудования, такого как конвейеры, сортировки или складское оборудование, такое как карусели и решения AS / RS, каждый склад может получить операционную гибкость, гибкость и производительность на определенном уровне процесса. автоматизация.
На рассмотрение:
- Автоматический мобильный сбор данных позволяет вашим сотрудникам повысить точность и производительность данных инвентаризации за счет исключения ручных процессов сбора данных.
- Программное обеспечение для управления запасами добавляет новый уровень автоматизации, обеспечивая расширенный контроль запасов и видимость в режиме реального времени уровней запасов, мест хранения и информации о продуктах.
- Система управления складом (WMS) дополнительно оптимизирует и ускоряет ключевые складские задачи, направляя прием, приемку на склад, комплектование, упаковку, отгрузку и использование площадей по оптимизированным маршрутам.
Складская автоматика банка:
- Повысьте эффективность, производительность и точность
- Увеличить наглядность, контроль и оперативность
- Повысьте уровень удовлетворенности своей работой
- Сократить затраты на , сократить накладные расходы и страховой запас
- Drive Повышение удовлетворенности клиентов
- Создание преимуществ для предприятий и цепочки поставок
Список можно продолжить.
Если ваша компания расширяется, но испытывает проблемы с ростом цепочки поставок, автоматизация склада может быть на горизонте.
Если вы хотите узнать больше о принципах автоматизации склада, не стесняйтесь читать блог о мобильной цепочке поставок, обратитесь к эксперту или загрузите следующий ресурс:
7 Передовые методы управления запасами запчастей
Часто склады запчастей и складские запасы не получают должного внимания, необходимого для обеспечения их эффективной и точной работы.Некоторые причины, по которым мы видим это, заключаются в том, что руководство считает, что отделы запчастей не приносят доход компании, и полагают, что запчастями должно быть легко управлять.
Такой образ мышления, наряду с неспособностью систематически управлять запасными частями и неспособностью использовать передовые методы складской инвентаризации, может быть проблематичным. Если когда-либо внимание будет обращено на решение этих проблем, вы быстро поймете, что это будет сложно и потенциально болезненно.
К счастью, есть вещи, которые можно сделать, чтобы избежать проблем и обеспечить бесперебойную работу вашего склада запчастей.Точная система инвентаризации запчастей позволяет отделу запчастей действовать более активно и оперативно реагировать на потребности завода. Компании могут сэкономить значительные средства, поскольку им не нужно ускорять доставку детали, когда она уже находится на складе. Вот семь передовых методов управления запасами запчастей для более эффективного управления запасами запчастей:
1. Систематически идентифицировать все части
Когда оборудование выходит из строя из-за капитального ремонта, может быть несколько предметов, приобретенных для одноразового использования.Из-за этого некоторые из этих деталей могут не входить в склад и не создаваться как запись детали в системе управления запасами. После завершения капитального ремонта оборудования могут остаться неиспользованные части, которые пригодятся в будущем и должны быть инвентаризированы. Другое оборудование на заводе может использовать эти неиспользованные части. Вместо того, чтобы хранить эти детали в ящике, на рабочем столе или в шкафу, их следует добавить в систему управления запасами и поместить в инвентарь деталей.
2.Использование и управление ведомостью материалов (BOM)
Спецификациизначительно упростят заказ деталей и размещение заказов на работу. Кроме того, убедитесь, что ваши спецификации обновляются. Худшее, что может случиться, — это начать создавать неточности инвентаря, потому что деталь не была добавлена, изменена или удалена из спецификации.
Наличие точных спецификаций также поможет вам при плановом профилактическом обслуживании (PM), которое необходимо для данной единицы оборудования. В некоторых системах расписание PM будет генерировать заказ на работу с запланированной датой PM.
3. Оптимизация процесса заказа на работу
Иметь четкую, но простую процедуру заказа на работу, которой может следовать каждый. Для отпуска всех запчастей необходимо создавать рабочие задания, чтобы запасы оставались точными. Разработайте процесс заказа на работу, который не будет чрезмерно сложным, но обеспечит передачу всей необходимой информации. Если это слишком сложно или есть способы получить детали без заказа на работу, вы обнаружите, что сотрудники не используют желаемый процесс, и начнут возникать неточности инвентаризации.
Имейте процесс, в котором заказы на неэкстренные работы размещаются заранее. Заказы на работу, запрошенные заранее, могут быть доставлены и отправлены для самовывоза или доставлены в запрашивающий отдел. Это сократит время ожидания службы технического обслуживания на складе запчастей для выполнения своего рабочего задания.
4. Принять меры безопасности
Убедитесь, что на складе запчастей приняты эффективные меры безопасности. Следует рассмотреть несколько критических практик. Ограничение доступа к инвентарю склада запчастей имеет решающее значение для поддержания точности инвентаризации.Примите политику, согласно которой складские запасы запчастей запрещены, и доступ к ним имеют только сотрудники отдела запчастей.
Первый способ гарантировать это — принять меры физической безопасности, такие как счетчики деталей, которые не позволяют сотрудникам заходить на складские запасы и извлекать необходимые детали. Предоставление всем доступа может быстро сделать инвентаризацию запчастей неточной.
Второй способ помочь в достижении этой цели — установить системы видеонаблюдения и начать использовать пропуски доступа к точкам входа и выхода.
5. Централизовать и объединить детали
По возможности централизуйте и объедините вспомогательные запасы запчастей на своем основном складе. Централизация и консолидация всех ваших компонентов может упростить безопасность, но также упростит управление этим потенциально крупным активом и поддержание точности инвентаризации.
6. Используйте систему управления запасами
Использование складских функций ERP или системы управления складом (WMS) — а не электронных таблиц — для управления запасами запчастей обеспечит точность и простоту управления складом запчастей.Кроме того, использование штрих-кодов и функций сканирования в сочетании с системой значительно повысит эффективность процессов на складе запчастей и повысит точность инвентаризации.
7. Укажите складское место для каждой детали, чтобы сотрудники могли легко найти
Убедитесь, что складские помещения созданы с наименьшей степенью детализации (обычно складские места и места для каждого артикула), разрешенные вашими системами. Сотрудникам может быть сложно найти деталь, если идентификатором местоположения является полка, на которой многие другие части находятся в общем месте.
Приняв вышеуказанные рекомендации, вы сможете лучше контролировать свои запасы запчастей и обеспечить более быстрое и точное выполнение рабочих заданий и других запросов на запчасти.
5 лучших запасных частей для обслуживания промышленных роботов
Покупая промышленного робота, каждый клиент хочет повысить его производительность. Некоторые факторы можно контролировать, чтобы сократить время простоя робота на производственной линии. Фактором, которым можно легко управлять, является время простоя, связанное с техническим обслуживанием.Поскольку большинство компаний хотят иметь кратчайшие сроки обслуживания, чтобы вернуться в производство, здесь не так много свободы. Это означает, что изменения должны быть эффективными и быстрыми, поэтому вам следует подумать о создании инструментария для запасных частей. Вот 5 лучших запасных частей, которые должны быть в вашем ящике с инструментами для обслуживания промышленных роботов.
1. Подвеска Teach
Говоря о наиболее распространенной проблеме обслуживания промышленных роботов, подвесной пульт обучения всегда является отправной точкой, когда у клиентов возникают проблемы с подключением к контроллеру робота.Хранение дополнительного подвесного кабеля и обучающего подвесного кабеля упрощает замену и устранение неисправностей.
2. Расходные материалы
В зависимости от области применения расходные материалы могут быть такими же простыми, как наличие сварочной проволоки на складе для сварочного робота. Концевые исполнительные части также следует рассматривать как расходные материалы, такие как присоски, подушки и т. Д. Большинство производителей промышленных роботов-захватов могут предоставить список запасных частей, которые могут быть полезны в случае удара или неправильного использования.
3.Моторы
Двигатели, усилители и маршрутизаторы необходимы для работы робота. Наличие некоторых запасных частей в вашем ящике для инструментов поможет предотвратить длительные простои производственной линии. Вы всегда должны учитывать мелкие детали, которые могут сгореть, например, двигатели внутри электрического захвата.
4. Смазка для роботов
Большинство типов роботов нуждаются в регулярной смазке шестерен. Чтобы обеспечить эффективное обслуживание, важно иметь под рукой подходящий тип смазки для роботов.Чтобы улучшить нанесение смазки, рекомендуется использовать насос для смазки или пистолет.
5. Батареи для роботов
Всегда полезно хранить запасные батареи для манипулятора и контроллера в ящике для инструментов. Эти компоненты легко хранить и менять. Это позволит вам поддерживать вашу систему в рабочем состоянии с минимальным временем простоя.
Эти несколько советов помогут сократить время простоя из-за технического обслуживания. Иметь нужную деталь в нужное время — это всегда хорошо, когда производство должно продолжаться.Если вы хотите получить промышленный робот с различными характеристиками, обратитесь к своему дилеру.
АВТОМАТИЗАЦИЯ НА VB-AIRSUSPENSION »VB-Airsuspension
Чтобы сохранить уровень роста, который компания переживает в настоящее время, и подготовиться к будущему, в этом году мы начали автоматизировать наши рабочие процессы. По этой причине с марта 2018 года в цехе работает кобот, а наш склад модернизируется автоматическими модулями вертикального подъема.
Кобот Франка Эмика
Кобот Франка Эмика — это коллективный робот, который может работать с людьми и вместе с ними. Коботы имеют встроенные меры безопасности, такие как аварийная остановка и регулируемое безопасное расстояние. Например, роботизированные руки кобота останавливаются при столкновении с чем-либо, и их можно удерживать рукой. Ультрасовременные коботы помогут персоналу VB выполнять обременительные повторяющиеся задачи, такие как закручивание гаек 10 000 раз.
В настоящее время мы проводим технико-экономическое обоснование для коботов, чтобы оценить потенциал этой технологии для наших производственных процессов.Мы уже протестировали множество процессов, один из которых мы доработали. Этот процесс включает в себя привинчивание металлической пластины к пластиковому блоку — мы поставляем примерно 10 000 штук в год. В будущем мы рассмотрим возможность использования робота для нескольких производственных процессов.
Модули вертикального подъема от Modula
Модуль вертикального подъема от Modula — это закрытая система хранения, основанная на принципе доставки товаров к человеку. Этот принцип означает, что благодаря вертикальной системе хранения и комплектации заказов сотрудникам VB больше не нужно идти пешком или подъезжать к товарам; вместо этого им привозят товары.Поскольку товары всегда снимаются с подъемника на эргономичной высоте, нашим коллегам больше не нужно наклоняться, чтобы добраться до них.
Модуль вертикального подъема содержит ящики для хранения товаров, и подъемник даже снимает эти ящики и хранит их в наиболее удобном месте. Подъемник рассчитывает это, используя высоту товаров и их популярность, избегая пустого пространства в подъемном модуле и обеспечивая максимальное использование доступного пространства. Продукция хранится в закрытых вертикальных подъемных модулях в непыльной среде.
В настоящее время ведутся последние штрихи к модулям вертикального лифта, и в ближайшие месяцы они будут подключены к нашей системе ERP, чтобы обеспечить управление логистикой. Затем товары будут размещены в модулях вертикального лифта, и склад будет реорганизован. Благодаря этим модулям вертикального подъема мы ожидаем, что с января у нас будет на 250% больше возможностей для сбора запасных частей и продуктов SemiAir. Также мы сэкономим 300 м2 площади на складе.