Несколько любимых разводов от гаишников
Автор: Евгений Каримов // Фото: Илья Давидович, Евгений Каримов
Есть несколько интересных ситуаций, когда сотрудник полиции может попытаться неправомерно выписать штраф водителю, а он из-за незнания ПДД с этим согласится. Зачастую в таких случаях до составления протокола дело не доходит, и водитель спонсирует недобросовестного полицейского. Я выделю 5 самых частых моментов, с которыми сталкивался сам, и только знания Правил помогли отбиться от развода.
Случай 1. Зона действия знака
Типичная ситуация: на обочине или столбе висит знак 3.24 «Ограничение максимальной скорости», допустим, 50 км/ч. Всё понятно, сбрасываем скорость. Но как долго ехать с такой скоростью? Чаще всего зона действия знака понятна и не вызывает вопросов. Однако может быть и такое, что так намудрят при установке, гадай потом — что, где, когда?
Простой пример — ситуация со знаками, установленными на зимний период на загородных трассах Алматинской области. Как мы писали, применена комбинация из трёх дорожных знаков: 1.15 («Скользкая дорога»), 3.24 («Ограничение скорости», в данном случае 50 км/ч) и видоизменённая информационная табличка 7.2.1 «Зона действия знака», сообщающая о том, что ограничение скорости действует только при гололёде и на протяжении 5 км. Вроде понятно. Но как на самом деле?
Как мы писали, применена комбинация из трёх дорожных знаков: 1.15 («Скользкая дорога»), 3.24 («Ограничение скорости», в данном случае 50 км/ч) и видоизменённая информационная табличка 7.2.1 «Зона действия знака», сообщающая о том, что ограничение скорости действует только при гололёде и на протяжении 5 км. Вроде понятно. Но как на самом деле?
Рассмотрим реальную ситуацию, в которой такая комбинация установлена в селе Гульдала (бывш. Красное Поле) Алматинской области. Берём в руки ПДД, читаем раздел про запрещающие знаки, точнее, пояснение к нему:
«Зона действия знака 3.24 распространяется от места установки до ближайшего за ним перекрёстка, а в населённых пунктах при отсутствии перекрёстка — до конца населённого пункта. Действие знаков не прерывается в местах выезда с прилегающих к дороге территорий».
Действие знака 3.24, установленного перед населённым пунктом, обозначенным знаком 5.22, распространяется до этого знака. Поясняем человеческим языком: зона действия ограничения скорости прерывается на ближайшем перекрёстке. Если его нет, то на границе населённого пункта, неважно, въезжаете в него или выезжаете из него.
Если его нет, то на границе населённого пункта, неважно, въезжаете в него или выезжаете из него.
А как же табличка с 5 километрами? Вопрос интересный. Продолжаем дальше читать Правила: «Зона действия знаков может быть уменьшена: для знака 3.24 установкой в конце зоны его действия соответственно знаков 3.21, 3.23, 3.25 или применением таблички 7.2.1 «Зона действия знака». Важно обратить внимание: зона действия знака табличкой может быть только уменьшена! Но никак не увеличена.
Внимательно смотрим на фотографию: видно, что за знаком, метрах в 20, примыкает дорога с асфальтовым покрытием. Читаем пояснение, что такое перекрёсток: место пересечения, примыкания или разветвления дорог на одном уровне.
Что такое перекрёсток?
Некоторые водители, равно как и сотрудники ДП, могут возразить, что если нет знаков, значит не перекрёсток. Поэтому поясним: не считаются перекрёстками места пересечения (примыкания) с полевыми, лесными, выездами из жилых зон и другими второстепенными дорогами, перед которыми не установлены знаки приоритета.
В ПДД в определении, что такое главная дорога, чётко сказано, какую дорогу следует считать главной, если нет знаков приоритета: главная дорога — дорога с твёрдым покрытием (асфальто- и цементобетон, каменные материалы и тому подобное) по отношению к грунтовой. На фото хорошо видно, что примыкающая дорога асфальтированная. Следовательно — это перекрёсток.
Что получается? А то, что установленный знак, показанный на фото, по правилам имеет зону действия лишь до этого самого пересечения, т. е. порядка 10–15 метров. Однако на деле выходит по-другому. В паре сотен метров от знака стоит наряд полиции с треногой, останавливает автомобиль, который движется со скоростью выше 60 км/ч, и требует штраф за превышение. Запомните, данное действие сотрудника полиции неправомерно. И если протокол будет составлен, зафиксируйте место нарушения, все знаки и перекрёстки и потребуйте через суд аннулировать штраф.
Случай 2. Зона до начала действия знака
Другая ситуация — знак 3. 24 с табличкой, установленный на проспекте Суюнбая, южнее развязки с проспектом Рыскулова. На столбе висит комбинация из знака 3.24 «Ограничение скорости 50 км/ч» и табличка, на которой написано «300 м». С какой скоростью можно ехать после знака? Многие водители, а также остановивший меня один раз инспектор полиции, уверены, что ехать надо со скоростью не более 50 км/ч. А на самом деле?
24 с табличкой, установленный на проспекте Суюнбая, южнее развязки с проспектом Рыскулова. На столбе висит комбинация из знака 3.24 «Ограничение скорости 50 км/ч» и табличка, на которой написано «300 м». С какой скоростью можно ехать после знака? Многие водители, а также остановивший меня один раз инспектор полиции, уверены, что ехать надо со скоростью не более 50 км/ч. А на самом деле?
Почему там пытаются снизить скорость — понятно. Сразу за знаком дорога делает крутой поворот налево, где изредка бывают серьёзные ДТП. Но невольно вспоминается пословица «Хотели как лучше, а получилось как всегда».
Вместе со знаком 3.24 применена табличка 7.1.1 «Расстояние до объекта», вместо 7.2.1 «Зона действия знака». Получается, что от места установки знака и на протяжении последующих 300 м можно ехать со скоростью 60 км/ч, а потом (когда, кстати, водитель минует тот самый опасный поворот) надо будет снизить скорость до 50 км/ч.
Однако именно в том месте, откуда, судя по знакам, начинает действовать ограничение скорости, иногда стоит инспектор полиции, останавливающий все автомобили, двигающиеся со скоростью более 60 км/ч, чтобы составить протокол за превышение скорости. Знайте, если он это сделает, будет неправ.
Знайте, если он это сделает, будет неправ.
Случай 3. Зелёный мигающий
В практике почти каждого водителя случается, что перекрёсток проезжается на мигающий зелёный сигнал светофора. Также бывает, что за это действо сотрудник дорожной полиции пытается оштрафовать водителя, инкриминируя при этом проезд перекрёстка на запрещающий сигнал светофора. Как быть? В Правилах дорожного движения, разделе 5 «Сигналы светофора и регулировщика», внимательно читаем п. 2.2: «Зелёный мигающий сигнал разрешает движение и информирует, что время его действия истекает и вскоре будет включён запрещающий сигнал».
Вот так, ни больше ни меньше, сигнал хоть и мигающий, но он разрешает движение! Так что если инспектор решит составить на вас административный протокол, то не мешайте ему — пусть пишет. Но настаивайте на том, чтобы он указал проезд именно на зелёный мигающий! Тогда вы с лёгкостью докажете, что действия сотрудника полиции неправомерны.
Случай 4.
 Как пропускать пешеходов
Как пропускать пешеходовОбычная ситуация: пешеход переходит проезжую часть по пешеходному переходу. Вы проезжаете мимо него, за что вас останавливает инспектор дорожной полиции и выписывает штраф за то, что не пропустили пешехода. А обязаны ли вы его пропускать?
Читаем ПДД, пункт 14.1: «Водитель транспортного средства уступает дорогу пешеходам». Речи о том, что надо однозначно пропускать, нет. Ибо в общих положениях ПДД написано: «Уступить дорогу (не создавать помех) означает, что участник дорожного движения не начинает, не возобновляет или не продолжает движение, не осуществляет какой-либо манёвр, если это может вынудить других участников движения, имеющих по отношению к нему преимущество, изменить направление движения или скорость». Таким образом, при наличии доказующего материала (к примеру, показания свидетелей, самого пешехода или запись с видеорегистратора) можете опротестовать составленный административный протокол, мотивируя тем, что вы не создали помех пешеходу.
Но уступать дорогу нужно не всем пешеходам, пересекающим проезжую часть. В п. 14.1 ПДД чётко сказано: «Водитель транспортного средства уступает дорогу пешеходам, переходящим проезжую часть дороги его направления движения по нерегулируемому пешеходному переходу».
Другими словами, водитель может продолжать движение, если пешеходы, пересекающие дорогу по пешеходному переходу, находятся на полосе встречного движения и ещё не достигли осевой линии. Если же пешеход находится на той же стороне дороги, что и водитель, уступить дорогу ему необходимо. Но именно уступить, а не пропустить. Не путайте эти понятия! То же самое и при повороте направо-налево. Вы обязаны уступить пешеходам, которые переходят проезжую часть дороги по направлению вашего движения.
Лишь пункт 14.5 ПДД РК требует именно пропустить пешехода, причём в любом месте: «Во всех случаях, в том числе и вне пешеходных переходов, водитель обязан пропустить слепых пешеходов, подающих сигнал белой тростью».
Случай 5. Разворот через трамвайные пути
В некоторых городах Казахстана ещё сохранился такой общественный транспорт, как трамвай. Соответственно в городе проложены трамвайные пути. Едете вы по улице, середина которой занята трамвайными путями, и тут внезапно потребовалось развернуться. И только успели завершить манёвр, как слышите позади полицейскую крякалку и призыв инспектора полиции остановиться. Вас обвиняют в развороте в неположенном месте.
Сначала вспомним, где Правилами запрещён разворот. Читаем пункт 8.12: «Разворот запрещается:
- На пешеходных переходах и перекрёстках по линии тротуаров или обочин.
- В тоннелях.
- На мостах, путепроводах, эстакадах и под ними.
- На железнодорожных переездах.
- В местах с видимостью дороги менее ста метров.
- В местах расположения остановочных пунктов».
Как видно, в этом пункте нет запрета на разворот через трамвайные пути. Более того, пункт 8.6 ПДД РК чётко указывает, что «при наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, разворот должен выполняться с них».
О том, что разрешено движение по трамвайным путям, написано и в пункте 9.6 ПДД: «Разрешается движение по трамвайным путям попутного направления, расположенным слева на одном уровне с проезжей частью дороги, при объезде, обгоне, повороте налево или развороте с учётом пункта 6 раздела 8 Правил. При этом не должно создаваться помех трамваю. Не допускается выезд на трамвайные пути встречного направления».
Запомните основные моменты, которые надо иметь в виду при развороте: трамвайные пути должны быть на одном уровне с проезжей частью, запрещено выезжать на трамвайные пути встречного направления.
Таким образом, разворот через трамвайные пути вне перекрёстка не запрещён.
И ещё один похожий момент: некоторые считают, в том числе среди таких встречаются и инспекторы полиции, что трамвайные пути являются своеобразным эквивалентом двойной сплошной линии разметки (линия 1.3). Однако это не так — в ПДД нет ни слова об этом. Будьте внимательны на дорогах, знайте и соблюдайте правила дорожного движения и не давайте себя разводить!
Будьте внимательны на дорогах, знайте и соблюдайте правила дорожного движения и не давайте себя разводить!
По мотивам данной статьи мы сняли юмористический видеоролик, где таксист Русик делится со зрителями своим опытом
Временные дорожные знаки: какие согласно ПДД
Визуальные символы для регулирования движения могут устанавливаться на ограниченный срок. Они отличаются от стационарных внешним видом, но иногда водители путают временный указатель с постоянным, расположенным на желто-зеленом щите. Кроме того, многие уверены, что за игнорирование требований действующего ограниченный срок символа им ничего не грозит.
О том, какими бывают временные дорожные знаки, где и как устанавливаются, а также диктуемых ими правилах, читайте в этой статье.
📌 Содержание статьи
Временные дорожные знаки в ПДД и их особенности
В ПДД предусмотрено, что действовать ограниченный срок могут символы:
- 1.
 8, оповещающий о том, что движение регулируется светофором;
8, оповещающий о том, что движение регулируется светофором; - 1.15, устанавливаемый при скользком покрытии;
- 1.16, информирующий о неровной дороге;
- 1.18, предупреждающий о выбросе гравия под колеса машины;
- 1.20.1-1.20.3, устанавливаемые перед сужением полотна;
- 1.21, оповещающий об установлении двустороннего движения;
- 1.25, информирующий о дорожных работах;
- 1.32, указывающий на то, что на пути есть затор;
- 1.33, предупреждающий об опасности;
- 1.34.1, 1.34.2, указывающие направление поворота;
- 2.5, запрещающий ехать без остановки;
- 2.6, определяющий преимущество встречного движения;
- 2.7, ограничивающий область действия предыдущего указателя;
- 3.20, запрещающий на участке обгон;
- 3.21, прекращающий действие 3.20;
- 3.24, ограничивающий максимально разрешенную скорость;
- 3.25, завершающий зону влияния предыдущего символа;
- 4.2.1-4.2.3, указывающие на необходимость объезда препятствия;
- 6. 17, демонстрирующий схему объезда;
- 6.18.1-6.18.3, показывающие направление, по которому следует обходить препятствие;
- 6.19.1, 6.19.2, устанавливающие необходимость перестроения на другую проезжую часть, когда первая закрыта для движения.
 8, оповещающий о том, что движение регулируется светофором;
8, оповещающий о том, что движение регулируется светофором; 17, демонстрирующий схему объезда;
17, демонстрирующий схему объезда;Но учитывая конкретные условия, любое обозначение может устанавливаться на ограниченный срок.
По ПДД временные дорожные знаки часто сочетаются друг с другом и дополняются табличками, уточняющими территорию их влияния или указывающими дистанцию до проблемного участка. Некоторые из них встречаются редко. Другие можно видеть в населенных пунктах, а также на автомагистралях.
А здесь подробнее о том, как ехать на дорожный знак «Главная дорога».
Ограничения скорости
Временные дорожные знаки «Ограничение скорости» используют обычно там, где ведется ремонт, требуется объезд или приходится двигаться по узкому участку. И быстрая езда может привести к ДТП.
И быстрая езда может привести к ДТП.
3.24 желтого цвета часто сочетается с символами 3.20, 4.2.1-4.2.3, 1.15,1.16, 1.18 или 1.20.1-1.20.3. Иногда один за другим ставят несколько указателей ограничения скорости, чтобы автомобили снижали ее плавно. Например, на первом отрезке она должна быть не более 70 км/ч, на следующем – до 50 км/ч, на завершающем – до 40 км/ч.
А еще рядом с 3.24 может оказаться табличка 8.2.1. Она показывает протяженность участка, по которому следует двигаться с ограниченной скоростью. Если ее нет, следует искать символ 3.25, завершающий область влияния 3.24.
При дорожных работах
Именно временные знаки при дорожных работах можно встретить чаще всего. Постоянными, то есть с белым фоном, они почти не бывают.
1.25 требует от водителей особого внимания. В зоне его действия не только проблемная дорога, но обычно находятся спецтехника, материалы и рабочие. Здесь необходимо снижать скорость, поэтому рядом устанавливают символ 3. 24. С дороги под колеса может лететь щебень, о чем предупредит обозначение 1.18. И ширина оставленного для проезда участка уменьшается, поэтому с 1.25 закрепляют таблички 1.20.1-1.20.3.
24. С дороги под колеса может лететь щебень, о чем предупредит обозначение 1.18. И ширина оставленного для проезда участка уменьшается, поэтому с 1.25 закрепляют таблички 1.20.1-1.20.3.
Если же ремонтируемый отрезок нужно объезжать, водители увидят символы 6.17 или 6.18.1-6.18.3. Дополнительные знаки (но не таблички) тоже должны быть желтого цвета.
1.25 имеет особенности установки:
Знак 1.25 при проведении краткосрочных работ на проезжей части может устанавливаться без таблички 8.1.1 на расстоянии 10 — 15 м до места проведения работ.
А вне города либо села он повторяется за 50 м до опасного отрезка. В населенном пункте 1.25 ставят непосредственно перед ремонтируемым участком.
Переносные и желтые
Желтые временные дорожные знаки нередко путают со стационарными, расположенными на прямоугольной основе такого же цвета. Но во втором случае этот фон внешний. Внутри постоянный символ белый, и на нем рисуют главное изображение. А желто-зеленое окружение позволяет лучше видеть его в темноте.
У временного указателя желтый фон располагается внутри окантовки. На нем находится основное изображение. Одновременно с установкой непостоянной таблички стационарные должны быть сняты или скрыты. Но они нередко остаются видимыми.
Характерной особенностью символов, используемых ограниченный срок, является способ установки. Их могут располагать прямо на проезжей части в виде «раскладушки». Переносные временные дорожные знаки проще и быстрее монтируются и убираются. Кроме того, на одной раскладной опоре можно оформить сразу несколько указателей. Способ узаконен ГОСТом:
В местах проведения работ на дороге и при временных оперативных изменениях организации движения знаки на переносных опорах допускается устанавливать на проезжей части, обочинах и разделительной полосе.
Зона действия временных знаков
Желтые регулирующие движение символы ограничены не только по сроку использования. Зона действия временных дорожных знаков тоже не бесконечна. Она может ограничиваться:
- Еще одним символом, означающим окончание территории влияния предыдущего.Например, для участка с ограничением скорости это 3.25. Второй указатель должен быть тоже желтого цвета.
- Табличкой 8.2.1. Она показывает, на каком расстоянии действует знак, закрепленный рядом с ней, и устанавливается с повторным символом.
- Табличками 8.2.2, 8.2.3. Используются реже.
- Указателем 3.31. Он означает завершение всех налагаемых до этого места ограничений.
Если перечисленных символов нет (что бывает редко), территория влияния оканчивается на ближайшем от места установки перекрестке или в начале (конце) населенного пункта.
Установка согласно ГОСТу
Временные дорожные знаки ГОСТ Р 52289-2004 требует монтировать особым образом. При плохой видимости их дублируют на левой стороне пути, разделительной полосе. Ограниченно действующие символы располагают на расстоянии не менее 50 м друг от друга, если речь об отрезке вне города или села. А в населенных пунктах оно должно быть 25 м.
Особые требования к установке есть для некоторых указателей:Вне населенных пунктов знаки 1.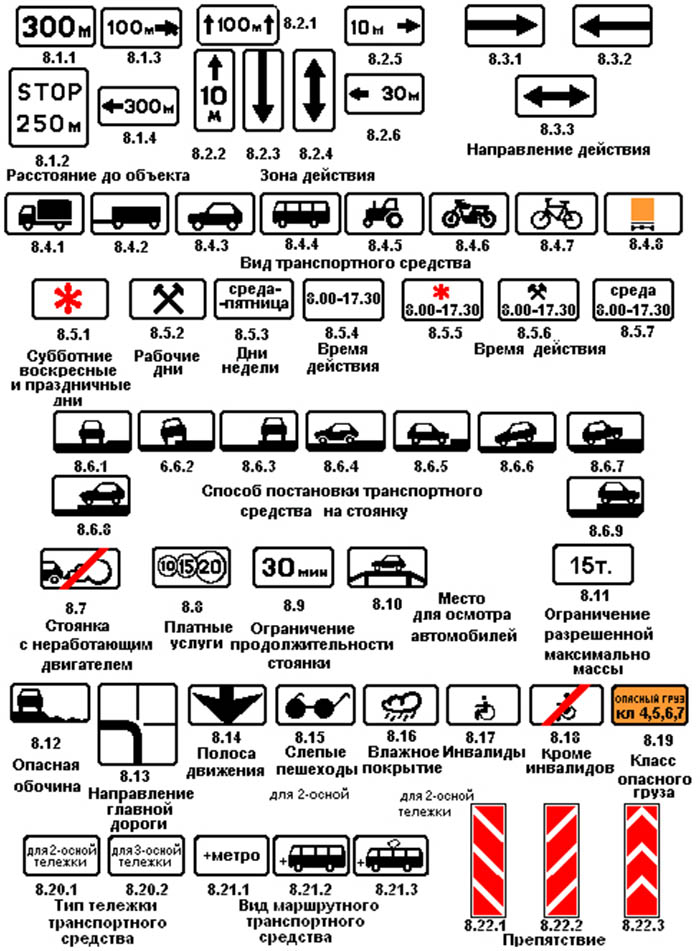 1, 1.2, 1.9, 1.10, 1.23 и 1.25 повторяются. Второй знак устанавливается на расстоянии не менее 50 м до начала опасного участка. Знаки 1.23 и 1.25 повторяются и в населенных пунктах непосредственно в начале опасного участка.
1, 1.2, 1.9, 1.10, 1.23 и 1.25 повторяются. Второй знак устанавливается на расстоянии не менее 50 м до начала опасного участка. Знаки 1.23 и 1.25 повторяются и в населенных пунктах непосредственно в начале опасного участка.
Есть и такое условие:
Знаки устанавливают непосредственно перед перекрестком, местом разворота, объектом сервиса и т.д., а при необходимости — на расстоянии не более 25 м в населенных пунктах и 50 м — вне населенных пунктов перед ними, кроме случаев, оговоренных настоящим стандартом.
Мнение эксперта
Надежда Смирнова
Эксперт по автомобильному праву
То есть одни непостоянные символы устанавливаются непосредственно перед сложным участком, где нужно изменить режим движения, а другие – еще и за несколько десятков метров до него.
Приоритет временных знаков
Приоритет временных дорожных знаков безоговорочно установлен ПДД. Если рядом есть стационарные, на них не стоит обращать внимание. Участники движения должны делать то, что предписывает действующий в течение ограниченного срока символ.
Штраф за проезд
Штраф за временные дорожные знаки, точнее проезд под них не по правилам, может составить минимум 500 р. Есть часть 1 статьи 12.16 КоАП. Но если водитель не так повернул налево или развернулся, остановился либо припарковался, он отдаст 1000-1500 р.
Временные дорожные знаки – частая причина наказаний. Трудно менять из-за них привычные особенности езды на хорошо знакомом участке пути. И все же придется это делать, ведь теперь оштрафовать за нарушение могут и благодаря фиксации видеокамерой.
Полезное видео
Смотрите в этом видео о временных предупреждающих дорожных знаках:
Дорожный знак 2.4 «Уступите дорогу»
Знак 2.4 Водитель должен остановиться у перекрестка для того, чтобы уступить дорогу транспортным средствам движущихся по главной дороге.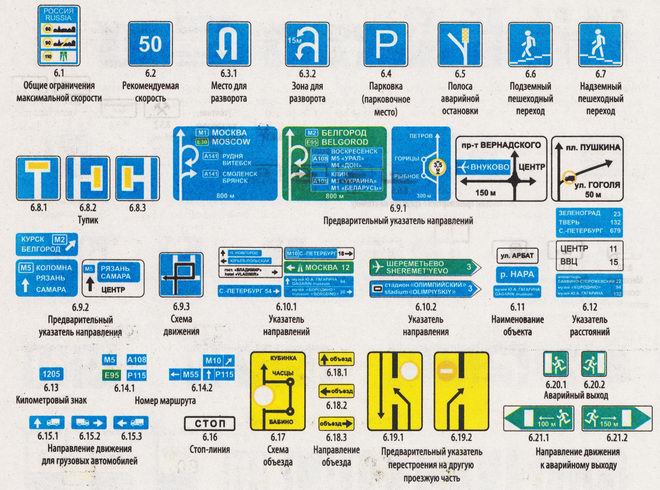
«Уступить дорогу (не создавать помех)» — требование, означающее, что участник дорожного движения не должен начинать, возобновлять или продолжать движение, осуществлять какой-либо маневр, если это может вынудить других участников движения, имеющих по отношению к нему преимущество, изменить направление движения или скорость. Пункт 1.1 П.Д.Д.
Устанавливается:
Непосредственно перед перекрестком или незадолго до него в качестве дублирующего знака.
Данный знак устанавливается совместно со знаками:
Ответы на экзаменационные вопросы к знаку 2.4 «Уступите дорогу»
Билет №7 Вопрос №2О чем информируют Вас эти дорожные знаки?
1. О приближении к таможне.
2. О приближении к перекрестку, где установлен знак «Уступите дорогу».
3. О приближении к перекрестку, где установлен знак «Движение без остановки запрещено».
Комментарий: Знак 2.4 «Уступите дорогу» в сочетании с табличкой 8.1.2 «Расстояние до объекта» информирует вас о том, что через 250 м на перекрестке будет установлен знак 2.5 «Движение без остановки запрещено».
Билет №11 Вопрос №5
Вы намерены повернуть налево. Где Вы должны остановиться, чтобы уступить дорогу?
1. В любом месте по усмотрению водителя.
2. Перед знаком.
3. На перекрестке перед прерывистой линией разметки.
4. Перед перекрестком у линии разметки.
Комментарий: Разметка 1.13 в виде линии из треугольников указывает место, где Вы должны при необходимости остановиться, выполняя требование знака 2.4 «Уступите дорогу».
Билет №12 Вопрос №15
Вы намерены повернуть налево. Кому следует уступить дорогу?
1. Только легковому автомобилю.
Только легковому автомобилю.
2. Всем транспортным средствам.
3. Только легковому автомобилю и автобусу.
Комментарий: Вы подъезжаете к перекрестку по второстепенной дороге, установлены знаки 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги». Вы обязаны уступить дорогу только автобусу и легковому автомобилю, так как она следуют по главной дороге. А вот по отношению к мотоциклу Вы пользуетесь преимуществом по правилам проезда перекрестков равнозначных дорог, поскольку вы являетесь для него помехой справа.
Билет №13 Вопрос №15
Вы намерены повернуть налево. Можете ли Вы приступить к повороту?
1. Нет.
2. Да, но не создавая помех грузовому автомобилю.
3. Да.
Комментарий: На перекрестке неравнозначных дорог правила не запрещают вам приступить к повороту налево одновременно с грузовым автомобилем, поскольку при разъезде правыми сторонами траектории движения автомобилей не пересекаются. Однако, находясь на второстепенной дороге знаки 2.4 и 8.13, вы должны убедиться, во-первых, что грузовой автомобиль действительно начал поворачивать налево и, во-вторых, что с учетом габаритов автомобилей, ширины проезжей части и т.п. в процессе поворота вы не создадите ему помех.
Однако, находясь на второстепенной дороге знаки 2.4 и 8.13, вы должны убедиться, во-первых, что грузовой автомобиль действительно начал поворачивать налево и, во-вторых, что с учетом габаритов автомобилей, ширины проезжей части и т.п. в процессе поворота вы не создадите ему помех.
Билет №16 Вопрос №15
Вы намерены повернуть налево. Кому следует уступить дорогу?
1. Только автобусу.
2. Только легковому автомобилю.
3. Обоим транспортным средствам.
Комментарий: Поскольку вы подъезжаете к перекрестку неравнозначных дорог по второстепенной дороге знаки 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги», Вы должны уступить дорогу обоим транспортным средствам, которые движутся по главной дороге.
Билет №18 Вопрос №13
Вы намерены повернуть направо. Следует ли уступить дорогу легковому автомобилю?
1. Да.
Да.
2. Нет.
Комментарий: Данный перекресток регулируемый, и очередность движения на нем определяется не знаками приоритета, а сигналами светофора. Поворачивая направо, вы имеете преимущество перед встречным легковым автомобилем, поворачивающим налево пункт 13.4 правил.
Билет №19 Вопрос №15
При въезде на перекресток Вы:
1. Должны уступить дорогу только мотоциклу.
2. Должны уступить дорогу обоим транспортным средствам.
3. Имеете преимущественное право на движение.
Комментарий: Порядок проезда перекрестков с круговым движением, на которых установлены знаки приоритета, точно такой же, как и обычных перекрестков неравнозначных дорог. Знак 2.4 «Уступить дорогу» обязывает вас уступить дорогу обоим транспортным средствам.
Билет №20 Вопрос №15
Вы намерены повернуть налево. Кому следует уступить дорогу?
Кому следует уступить дорогу?
1. Только автобусу и мотоциклу.
2. Только легковому автомобилю и автобусу.
3. Всем транспортным средствам.
Комментарий: В данной ситуации сначала разъезжаются транспортные средства которые двигаются по главное дороге о чем информируют знаки 2.4 «Уступи дорогу» и 8.13 «Направление главной дороги», а только после того начинают движения транспортные средства находящиеся на второстепенной дороге. Однако легковой автомобиль так же как и Вы находится на второстепенной дороге, справа от вас и вы должны уступить ему дорогу. В результате в данной ситуации вы должны уступить дорогу всем транспортным средствам.
Билет №21 Вопрос №15
Вы намерены продолжить движение прямо. Кому следует уступить дорогу?
1. Обоим транспортным средствам.
2. Только легковому автомобилю.
3. Только автобусу.
Комментарий: Это перекресток не равнозначных дорог знаки 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги». Вы подъезжаете к перекрестку по второстепенной дороге и, поэтому обязаны уступить дорогу обоим транспортным средствам, движущимся по главной дороге, независимо от направления их движения (пункт 13.9 правил).
Билет №22 Вопрос №15
Вы намерены повернуть направо. Можете ли Вы приступить к повороту?
1. Да.
2. Да, но не создавая помех грузовому автомобилю.
3. Нет.
Комментарий: Знак 2.4 «Уступите дорогу» обязывает вас на данном перекрестке неравнозначных дорог уступить дорогу грузовому автомобилю, не требуя обязательной остановки перед перекрестком. Поскольку грузовой автомобиль движется по левой, более удаленной от вас полосе дороги, вы можете приступить к повороту направо. Однако при этом в процессе всего маневра вы не должны создавать помех для движения грузового автомобиля (пункт 13. 9 правил ).
9 правил ).
Билет №26 Вопрос №15
Вы намерены продолжить движение прямо. Кому следует уступить дорогу?
1. Только легковому автомобилю.
2. Только автобусу и легковому автомобилю.
3. Всем транспортным средствам.
Комментарий: Поскольку Вы подъезжаете к перекрестку по второстепенной дороге (знаки 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги»), то вы должны уступить дорогу автобусу и легковому автомобилю (пункт 13.9 правил). По отношению к мотоциклу вы пользуетесь преимуществом, так как оба находитесь на второстепенных дорогах и Вы для него помеха справа (пункты правил 13.10 и 13.11 ).
Билет №31 Вопрос №15
Вы намерены продолжить движение прямо. Кому следует уступить дорогу?
1. Только мотоциклу.
2. Только мотоциклу и легковому автомобилю.
3. Только автобусу и мотоциклу.
4. Всем транспортным средствам.
Комментарий: На этом перекрестке неравнозначных дорог знаки 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги» Вы должны уступить дорогу мотоциклу и автобусу, поскольку они движутся по главной дороге (пункт 13.9 правил). Следует уступить дорогу и подъехавшему справа легковому автомобилю, при разъезде с которым Вы должны руководствоваться правилами проезда перекрестков равнозначных дорог (пункты правил 13.10 и 13.11 ).
Билет №32 Вопрос №2
Какие знаки информируют Вас, что на перекрестке необходимо уступить дорогу транспортным средствам, приближающимся слева?
1. Только А.
2. Только Б.
3. Только А и Б.
4. Все.
Комментарий: Знак «А» 2.3.3 «Примыкание второстепенной дороги» относится к знакам приоритета и информирует о том, что вы находитесь на главной дороге и на перекрестке имеете преимущество перед транспортными средствами, приближающимися слева. Знаки «Б» 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги» информируют о необходимости на перекрестке уступить дорогу транспортным средствам, приближающимся по главной дороге (направление главной дороги показано на знаке 8.13 ) как слева, так и со встречного направления. Знак «В» 5.13.1 «Выезд на дорогу с полосой для маршрутных транспортных средств» не устанавливает очередности проезда перекрестка и лишь информирует о выезде на дорогу, где встречная полоса выделена для маршрутных транспортных средств. Правильный ответ — Только Б.
Знаки «Б» 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги» информируют о необходимости на перекрестке уступить дорогу транспортным средствам, приближающимся по главной дороге (направление главной дороги показано на знаке 8.13 ) как слева, так и со встречного направления. Знак «В» 5.13.1 «Выезд на дорогу с полосой для маршрутных транспортных средств» не устанавливает очередности проезда перекрестка и лишь информирует о выезде на дорогу, где встречная полоса выделена для маршрутных транспортных средств. Правильный ответ — Только Б.
Билет №32 Вопрос №13
Вы намерены повернуть налево. Ваши действия?
1. Проедете перекресток первым.
2. Уступите дорогу только грузовому автомобилю с включенным проблесковым маячком.
3. Уступите дорогу только автобусу.
Комментарий: Данный перекресток регулируемый, и очередность движения на нем определяется не знаками приоритета, а сигналами светофора (пункты правил 6. 15 и 13.3 ). Поворачивая налево, вы должны уступить дорогу автобусу, движущемуся со встречного направления прямо (пункт 13.4 правил). Грузовой автомобиль с включенным проблесковым маячком оранжевого цвета преимущества в проезде перекрестков не имеет (пункт 3.4 правил), поэтому его водитель должен дожидаться разрешающего сигнала светофора.
15 и 13.3 ). Поворачивая налево, вы должны уступить дорогу автобусу, движущемуся со встречного направления прямо (пункт 13.4 правил). Грузовой автомобиль с включенным проблесковым маячком оранжевого цвета преимущества в проезде перекрестков не имеет (пункт 3.4 правил), поэтому его водитель должен дожидаться разрешающего сигнала светофора.
Билет №33 Вопрос №15
Вы намерены продолжить движение прямо. Кому следует уступить дорогу?
1. Только легковому автомобилю.
2. Только грузовому автомобилю.
3. Обоим транспортным средствам.
Комментарий: Поскольку Вы находитесь на второстепенной дороге знаки 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги», Вы можете проехать перекресток неравнозначных дорог, уступив дорогу обоим транспортным средствам, которые движутся по главной дороге (пункт 13.9 правил).
Билет №34 Вопрос №15
Вы намерены повернуть налево. Кому следует уступить дорогу?
Кому следует уступить дорогу?
1. Обоим транспортным средствам.
2. Только легковому автомобилю.
3. Только автобусу.
Комментарий: Очередность проезда перекрестков неравнозначных дорог не зависит от их конфигурации. Следовательно, Вы, находясь на второстепенной дороге знаки 2.4 «Уступите дорогу» и 8.13 «Направление главной дороги», должны уступить дорогу обоим транспортным средствам, которые движутся по главной дороге (пункт 13.9 правил).
Билет №38 Вопрос №11
Можете ли Вы начать обгон?
1. Да, если обгон будет завершен до перекрестка.
2. Да.
3. Нет.
Комментарий: Вы приближаетесь к нерегулируемому перекрестку по второстепенной дороге (знак 2.4 «Уступите дорогу»). На нерегулируемых перекрестках обгон запрещен при движении по дороге, не являющейся главной (п. 11. 5 ). Следовательно, в данной ситуации обгон грузового автомобиля можно начать лишь в том случае, если он будет завершен до перекрестка.
5 ). Следовательно, в данной ситуации обгон грузового автомобиля можно начать лишь в том случае, если он будет завершен до перекрестка.
Билет №38 Вопрос №15
Вы намерены повернуть направо. Можете ли Вы приступить к повороту?
1. Да.
2. Да, после того, как грузовой автомобиль начнет поворот.
3. Нет.
Комментарий: Знак 2.4 «Уступите дорогу» требует, чтобы вы уступили дорогу грузовому автомобилю, приближающемуся к перекрестку неравнозначных дорог по пересекаемой дороге. Поскольку понятие «Уступите дорогу» (п. 1.2 ) не требует обязательной остановки, вы можете приступить к повороту направо, как только убедитесь в том, что грузовой автомобиль действительно поворачивает налево. При этом в процессе всего маневра вы не должны создавать помех для его движения (п. 13.9).
Билет №40 Вопрос №15
Вы намерены повернуть налево. Кому следует уступить дорогу?
Кому следует уступить дорогу?
1. Только автобусу.
2. Только грузовому автомобилю.
3. Обоим транспортным средствам.
Комментарий: Поскольку перед перекрестком установлен знак 2.4 «Уступите дорогу», Вы, двигаясь по второстепенной дороге, должны, руководствуясь правилами проезда перекрестков неравнозначных дорог, уступить дорогу обоим ТС (п. 13.9).
Как расшифровывать сбивающие с толку дорожные знаки
Вождение — не всегда простая задача. Автомобилисты часто сбивают вас с толку (в автомобиле или велосипеде), символы на приборной панели иногда отвлекают, а плохая дорожная инфраструктура может ввести вас в заблуждение. Добавляют беспорядок дорожные знаки. В идеале знак должен указывать на состояние дороги, будь то предупреждение о резком повороте, зоне строительства или бродячих диких животных, которые могут пересечь ваш путь.
Но некоторые дорожные знаки затуманивают суждение, вместо того чтобы давать четкое изображение. На самом деле, у вас могут быть свои собственные истории, вращающиеся вокруг дорожного знака, которые вызвали недоумение, насмешку или раздражение. Жаль, что вы не можете обойтись без этих знаков, но есть способы обойти сбивающий с толку знак — вам не нужно тратить время, пытаясь расшифровать их, как если бы они были азбукой Морзе. С учетом сказанного, стоит посмеяться над несколькими нелепыми знаками.
На самом деле, у вас могут быть свои собственные истории, вращающиеся вокруг дорожного знака, которые вызвали недоумение, насмешку или раздражение. Жаль, что вы не можете обойтись без этих знаков, но есть способы обойти сбивающий с толку знак — вам не нужно тратить время, пытаясь расшифровать их, как если бы они были азбукой Морзе. С учетом сказанного, стоит посмеяться над несколькими нелепыми знаками.
Некоторые знаки трудно читать не из-за того, что на них написано, а из-за того, как они расположены.И по какой-то причине они обычно указывают направление. Вы, наверное, видели несколько знаков, которые указывают на основные дороги, но они настолько загромождены, что выбор пути — все равно что решить, какой провод вы должны выбрать: красный или синий, чтобы обезвредить бомбу. Все, что вам остается, — это догадываться.
После хорошей долгой паузы вы заметите, что эти знаки говорят о том, что въезды на шоссе 411 и 441 доступны в разных местах. Изначально? Похоже, его выложил кто-то, кто не очень хорошо учился на уроке географии.
Изначально? Похоже, его выложил кто-то, кто не очень хорошо учился на уроке географии.
Эти знаки можно было легко разделить, чтобы было удобнее ориентироваться. Вместо этого они сложены таким образом, что пациент, перенесший лазерную операцию, все еще сомневается в своем зрении.
Этот знак, расположенный в Виннипеге, Манитоба, является придорожным эквивалентом абстрактного искусства в музее. Вам придется постоять там какое-то время, чтобы по-настоящему понять, о чем он вам говорит. Его метко называют «Уголок путаницы».
Размещено ПротиворечияДорожные знаки, противоречащие друг другу, являются еще одним источником головной боли.Опять же, символы и сообщения обычно четкие, но их расположение сбивает водителей с толку. Обычно острый ум водитель поймет значение знаков. Конечно, есть надежда, что они разберутся в этом до того, как это запутает их или остановит коп.
«Вы делали 75 из 60».
«Нет офицера, я делал 75 из 80».
«хм… . touchè».
touchè».
Скорее всего, вы получите это через несколько секунд, но стрелка не нужна.
В расположении этих знаков есть что-то такое, что кричит «шалость».Эти знаки для парковки, расположенные в Вашингтоне, округ Колумбия, не только сбивают с толку, но и строго соблюдаются. Это забавно, потому что эту головоломку можно решить, просто поставив одну табличку с указанием, можно ли парковаться и сколько часов вы можете это сделать.
Требуется переводчикНекоторые дорожные знаки просто бессмысленны, сколько бы вы в них ни читали. Конечно, если вы читали о значении знака в книге, вы узнаете его, когда увидите. Но это не тот случай, если вы видите это впервые.Если вы новичок в каком-либо районе или просто приехали сюда, эти знаки заставят вас изо всех сил пытаться найти их значение, как студенты, пытающиеся расшифровать одно из стихотворений Шекспира.
Что это? Получаем часть ограничения скорости. Однако завитые волосы и стрелка, торчащая наверху, не такие четкие. Возможно, этому символу нужно найти новую работу в качестве бизнес-логотипа.
Возможно, этому символу нужно найти новую работу в качестве бизнес-логотипа.
Есть ограничение скорости на определенном участке дороги, да, но в чем смысл этого символа? Маркировка железнодорожных путей и переулков ничего не добавляет к указанию ограничения скорости.Хотя это могло стать классным символом для братства.
Пугающий, но несколько забавный знак, изображенный выше. Похоже, что он предупреждает о наличии самолетов-буксиров планеров, но сообщение, переданное здесь, кажется гораздо более зловещим (буксирный трос смотрит на путь бомбы … которая поразит вашу машину). Должен был быть хотя бы один водитель, который увидел этот знак и из-за него сделал разворот.
Встреча со странным знакомЕсли вы встретите странный дорожный знак, не позволяйте ему превращаться в дилемму.Если вы не знакомы с дорогой, это может немного утомить вас, но даже в этом случае есть шаги, которые нужно предпринять, чтобы путаница не взяла вас верх.
Спросите кого-нибудь, кому вы можете доверять Самый простой способ сделать, если вы не уверены в значении знака, — это спросить кого-нибудь. Конечно, вы должны убедиться, что люди, которых вы спрашиваете, заслуживают доверия. Это, безусловно, важно, если вы находитесь в другом городе или стране. Задавая вопросы об инфраструктуре, вы сразу же указываете на вас как на иностранца, что может привести к тому, что некоторые злоумышленники воспользуются вами.Лучше спросить друзей, членов семьи и сотрудников ближайших заведений. Ведь если они играют с вами, вы знаете, где они живут (или работают).
Конечно, вы должны убедиться, что люди, которых вы спрашиваете, заслуживают доверия. Это, безусловно, важно, если вы находитесь в другом городе или стране. Задавая вопросы об инфраструктуре, вы сразу же указываете на вас как на иностранца, что может привести к тому, что некоторые злоумышленники воспользуются вами.Лучше спросить друзей, членов семьи и сотрудников ближайших заведений. Ведь если они играют с вами, вы знаете, где они живут (или работают).
Планируете полет в экзотический регион или путешествие по континенту? Если это так, перед отъездом рекомендуется выучить дорожные знаки, характерные для этого региона. Поиск в Google творит чудеса. Вы увидите изображения того, что вы встретите на этой дороге, а также их значение.Вы также не ошибетесь, если воспользуетесь GPS, чтобы заранее составить карту своих маршрутов. Вы будете точно знать, куда вам нужно идти, даже если по пути увидите несколько хитрых знаков (особенно надоедливых знаков с ошибкой в направлении движения). Еще одна хитрость — найти руководство для водителя, в котором указаны дорожные знаки в регионе, в котором вы планируете путешествовать. Это может быть немного сложно найти, но поиск в Интернете может дать буклет в формате pdf. Надеюсь, он на английском или на другом языке, который вы понимаете. (Карта)
Еще одна хитрость — найти руководство для водителя, в котором указаны дорожные знаки в регионе, в котором вы планируете путешествовать. Это может быть немного сложно найти, но поиск в Интернете может дать буклет в формате pdf. Надеюсь, он на английском или на другом языке, который вы понимаете. (Карта)
Мы не пропагандируем анархию и бунт против закона.Однако, если вы натолкнетесь на знак, который совсем не очевиден, возможно, что-то больше похоже на шутку, чем на настоящий закон, тогда лучше притвориться, что его не существует. Причина, по которой мы можем сказать это, заключается в том, что некоторые знаки слишком произвольны, чтобы их можно было понять. Кроме того, многие из этих знаков плохо расположены, а сочетание неясного символизма и неудобного расположения делает многие из этих знаков в любом случае бесполезными. Если на этих знаках нет цифр (для обозначения скорости), стрелок (для обозначения направлений) или крестиков (для обозначения ограничений), возможно, вы имеете дело со знаком, который необходимо удалить.
На протяжении вашей карьеры вождения вы будете встречать массу знаков, которые мало или не имеют смысла. Они будут больше походить на детские иллюстрации, непонятные символы или фразы, написанные человеком, выпившим слишком много водки. Однако они не должны сбивать вас с толку. Многие дорожные знаки — это всего лишь побочные продукты сотрудников дорожных служб, которые были слишком заняты (или слишком ленивы), чтобы думать о произвольном характере символов и слов, которые они использовали.К счастью, чтобы понять, что они означают, не требуется сложной науки. Так что, встретите ли вы странный дорожный знак здесь или в другой стране, успокойтесь, зная, что это не обязательно испортит вам день или поездку. Спросите о его значении, сделайте фото и посмейтесь над этим позже.
Вездесущие значки: шоссе 101 — 99% невидимы
Значки, символы и указатели повсюду вокруг нас, и нигде больше, чем на открытой дороге. Итак, для этого последнего набора Ubiquitous Icons : садитесь в машину с Романом и Куртом для ускоренного курса по дорожным указателям.Мы узнаем об истории знака «Стоп», этого знаменитого сельского почтового ящика и знаков, которые сообщают вам, что вы найдете на съездах с шоссе.
Итак, для этого последнего набора Ubiquitous Icons : садитесь в машину с Романом и Куртом для ускоренного курса по дорожным указателям.Мы узнаем об истории знака «Стоп», этого знаменитого сельского почтового ящика и знаков, которые сообщают вам, что вы найдете на съездах с шоссе.
Красные знаки остановки
Наша первая достопримечательность — это классический американский знак остановки — вы его знаете: восьмиугольник, красный фон, белый принт. Но фанат написал, что заметил странный знак остановки , синий, на Гавайях. Причина, по которой некоторые знаки остановки синие, сама по себе была интересной небольшой историей, но исключение также заставило Курта задуматься: почему остальные красные?
Голубые дорожные знаки
Вдоль автострад и крупных автомагистралей есть еще один распространенный знак, где синий цвет является скорее нормой, чем исключением.Сверните с дороги, чтобы обсудить «специальные знаки обслуживания», знаки возле съездов с шоссе, которые сообщают вам, какие компании вы там найдете. Узнайте, что нужно для того, чтобы попасть на эти знаки, и как вы можете расшифровать их по пути.
Узнайте, что нужно для того, чтобы попасть на эти знаки, и как вы можете расшифровать их по пути.
Почтовые ящики с красными флажками
Хотя технически это не графический значок как таковой (по крайней мере, до эпохи цифровых технологий), существует определенный вид культового сельского почтового ящика, история которого насчитывает более 100 лет. Но чтобы понять, как появился этот классический дизайн, нам нужно вернуться еще дальше.Все началось в 1800-х годах, когда Почтовая служба США ввела бесплатную доставку по городу.
Желтые кошачьи глаза
Где бы вы ни ехали по дороге, вы обязательно увидите световозвращающие гвоздики. Конкретный дизайн варьируется от места к месту. Некоторые из них относительно просты, но другие удивительно сложны и имеют увлекательные истории происхождения, как, например, «Кошачьи глаза» Перси Шоу.
Эту последнюю историю мы взяли со страниц нашей будущей книги The 99% Invisible City , которая посвящена повседневному дизайну. В нашем исследовании мы искали как глобально, так и локально захватывающие истории и персонажей, например, эксперта по асфальтированию из Галифакса и кота, вдохновившего его спасительное изобретение — устройство, которое превратилось из хобби одного человека в механизм национальной обороны во время Второй мировой войны. .
В нашем исследовании мы искали как глобально, так и локально захватывающие истории и персонажей, например, эксперта по асфальтированию из Галифакса и кота, вдохновившего его спасительное изобретение — устройство, которое превратилось из хобби одного человека в механизм национальной обороны во время Второй мировой войны. .
Расшифровка признаков ответа на иммунотерапию рака
Иммунотерапия удаляет блоки на Т-клетках (красный цвет), которые затем могут атаковать опухоли. Кредит: Библиотека научных фотографий / Алами
Лечение рака, активирующее иммунную систему, показало замечательные результаты для многих пациентов.Ингибиторы иммунных контрольных точек (ICI) работают, вмешиваясь в механизм, который раковые клетки используют для уклонения от иммунного ответа хозяина. Лекарства, которые блокируют цитотоксический белок 4, связанный с Т-лимфоцитами (CTLA-4), белок запрограммированной гибели клеток 1 (PD-1) и лиганд запрограммированной смерти 1 (PD-L1), активируют Т-клетки, убивающие рак, которые были подавлены. ICI могут уменьшить опухоли и повысить выживаемость даже для пациентов, у которых другие методы лечения рака не помогли.
Только 20-40% пациентов реагируют на иммунотерапию 1 и, поскольку эти препараты могут активировать широкий спектр иммунных клеток, они могут иногда вызывать тяжелые аутоиммунные реакции.Если врачи могут предсказать, кто не ответит на лечение, они сэкономят на лечении и избавят пациентов от побочных эффектов.
Технологии секвенирования следующего поколения (NGS) начинают выявлять признаки реакции на лечение. Анализы, которые измеряют генетический профиль опухолей и иммунную активность хозяина, помогают принимать решения о лечении в клинических испытаниях с новыми иммуноонкологическими препаратами или комбинированной терапией, и они находят свое применение в повседневной клинической практике.
С 2017 года FDA одобрило два комплексных диагностических теста, основанных на технологии NGS для характеристики генетического профиля любого типа солидной опухоли, без привязки к какому-либо конкретному лекарству. Виктор Вейгман, директор по трансляционной геномике в Q 2 Solutions, поставщик лабораторных услуг для глобальных клинических испытаний из Северной Каролины, считает эти тесты началом новой эры NGS в клинике. «Гибкость NGS для предоставления отчетов по множеству аналитов создает сильную тягу к его использованию в иммуноонкологии.”
Отказ от использования одного теста для одного препарата по одному показанию дает огромные преимущества с точки зрения стоимости и клинической пользы, и это ускоряет усилия по разработке новых тестов. «Поле продвигается с огромной скоростью; всего несколько лет назад казалось невозможным, что NGS сможет многое рассказать нам о реакции пациентов на иммунотерапию », — говорит Тимоти Чан, директор платформы иммуногеномики и точной онкологии в Мемориальном онкологическом центре им. Слоуна Кеттеринга в Нью-Йорке. Йорк Сити.«Сегодня эти геномные анализы дают действенные результаты, и доказательства их клинической применимости растут».
Количественная оценка нескольких биомаркеров рака
Многие больницы и клиники проводят тестирование одного биомаркера для диагностики рака. Генетический скрининг на мутации в генах BRCA1 , EGFR или KRAS помогает онкологам определить риск развития у пациента определенных видов рака или лекарственной устойчивости. Тесты, которые оценивают уровни экспрессии PD-L1, также помогают определить вероятность клинической пользы от препаратов против PD-1 / PD-L1 и предоставить информацию о вариантах лечения.
Однако тесты с одним биомаркером не могут охватить всю генетическую сложность опухоли. Генетическое профилирование раковой ткани с помощью целевых NGS — это экономичный и быстрый способ одновременного анализа нескольких мишеней, который позволяет исследователям идентифицировать новые биомаркеры. В последнее время исследовательские усилия были сосредоточены на использовании NGS для количественной оценки количества мутаций в раковых клетках (бремя мутаций опухоли — TMB) и выявления генетических паттернов, которые нарушают механизмы репарации ДНК и вызывают накопление мутаций (микросателлитная нестабильность — MSI).TMB и MSI важны, потому что раковые клетки, несущие большое количество мутаций, с большей вероятностью будут производить белки, которые иммунная система распознает как чужеродные, и, следовательно, с большей вероятностью будут восприимчивы к иммунному ответу. Было показано, что высокий TMB 2 или высокий уровень MSI 3 коррелируют с лучшим прогнозом для пациентов с различными типами рака, проходящих лечение ICI.
Комбинаторный подход
Хотя MSI в настоящее время одобрен в качестве биомаркера рака для доступа к пембролизумабу ICI, все еще остаются нерешенными некоторые вопросы, касающиеся использования TMB и MSI в качестве рутинных биомаркеров.Существует множество способов измерения TMB, и его значение может варьироваться в зависимости от типа опухоли, что подчеркивает необходимость согласованных стандартов для измерения и установления пороговых значений TMB для конкретных заболеваний.
Исследование генома рака может выявить его слабые места. (Обратите внимание, что показанное оборудование предназначено только для исследовательских целей. Не для диагностических процедур). Кредит: Библиотека научных фотографий / Алами
Первоначально TMB определяли путем секвенирования всех кодирующих белок областей в геноме рака.Чтобы сократить затраты и время выполнения, большинство анализов нацелены на панель из нескольких сотен генов для измерения TMB. Отсутствие стандартизации для расчета TMB и отчетности привело к таким инициативам, как проект по гармонизации TMB друзей исследований рака, целью которого является создание универсального эталонного стандарта с использованием технологий NGS и выявление источников вариабельности оценок TMB, полученных из различных целевых панелей.
Корреляция между высоким TMB и благоприятным ответом на ICI не наблюдается у всех пациентов, получающих иммунотерапию, что позволяет предположить, что нельзя полагаться на одно универсальное определение высокого TMB 2 .Кроме того, исследование различных микросателлитно-стабильных опухолей, в котором учитывались особенности генома, выходящие за рамки мутационной нагрузки, выявило роль специфических генов или сигнальных путей в реакции на иммунотерапию 4 .
Фактически, результаты фазы II испытания атезолизумаба, терапевтического антитела против PD-L1, у пациентов с метастатическим уротелиальным раком, показали, что биомаркеры, такие как экспрессия PD-L1 и TMB, предоставляют независимую и дополнительную информацию об опухолях. ответ на лечение 5 .Складывается картина, что для прогнозирования реакции пациента потребуется комбинация маркеров. Гаррет Хэмптон, старший вице-президент по клинической геномике Illumina, Inc, ведущего поставщика технологий секвенирования из Сан-Диего, говорит, что «использование комбинаторных биомаркеров, вероятно, обеспечит более точные измерения преимуществ, связанных с иммунотерапией».
Рассечение взаимодействия рака и иммунитета
Не только генетический профиль опухоли может повлиять на иммунотерапевтический ответ.Несколько исследований подчеркнули роль исходного иммунного ответа хозяина в определении эффективности лечения 6 — и необходимость лучшего понимания взаимодействия между клетками в микроокружении опухоли.
В частности, повышенная инфильтрация Т-клеток в опухоли, по-видимому, связана с выживаемостью пациентов и ответом на иммунотерапию. Но факторы, определяющие, имеет ли опухоль высокий («горячий») или низкий («холодный») уровень инфильтрации Т-клеток, только начинают изучаться.
Чан провел большой генетический анализ пациентов с меланомой и раком легких, получавших ингибиторы контрольных точек 7 . Его команда обнаружила связь между ответом на лечение и генами лейкоцитарного антигена человека (HLA). Подобно предыдущим результатам у пациентов, инфицированных ВИЧ, гепатитом В или малярией, определенные профили HLA связаны с лучшими исходами при раке. «Люди, у которых больше вариаций в генах HLA, имеют большую способность распознавать, что есть« я », а что нет», — говорит он.
Чтобы лучше понять механизмы, управляющие или предотвращающие проникновение Т-клеток в опухоли, исследователи изучают изменения экспрессии генов в Т-клетках и раковых клетках. Секвенирование транскриптома рака в единичных клетках (scRNA-seq) дает ценную информацию об изменениях экспрессии генов, специфичных для конкретных типов клеток, которые не могут быть установлены с помощью общего анализа тканей.
«В отличие от массовых подходов, scRNA-seq позволяет нам выйти за рамки простого определения клеточного состава опухоли и охарактеризовать динамику, функциональные состояния и перекрестные связи между популяциями клеток микроокружения опухоли», — объясняет Джеки Шилдс, руководитель группы в онкологическом отделении MRC Кембриджского университета.
С помощью компьютерных моделей исследования scRNA-Seq выявили злокачественные клеточные программы экспрессии генов, которые связаны с исключением Т-клеток и их дисфункцией, и которые могут быть использованы для прогнозирования устойчивости к иммунотерапии. В своем последнем исследовании 8 Шилдс и его коллеги идентифицировали три различных типа связанных с раком фибробластов в меланоме мыши, которые могут модулировать иммунный ответ по мере прогрессирования опухоли.
«Что действительно интересно в scRNA-seq, так это то, что он позволяет нам идентифицировать новые или редкие популяции, которые часто« подавляются »при массовых подходах, и изучать их вклад в развитие болезни», — говорит она.«ScRNA предоставила платформу для значительного улучшения нашего понимания взаимодействия между опухолью и клетками-хозяевами с беспрецедентным разрешением».
От исследований к клиническим условиям
Разработчики лекарств и лаборатории клинических испытаний обычно используют анализы на основе NGS как для проспективного выявления пациентов, которые с наибольшей вероятностью получат пользу от текущих клинических испытаний, так и для ретроспективной оценки генетических сигнатур, которые предсказывают благоприятный ответ к лечению.
Секвенирование нового поколения можно использовать для анализа ДНК, полученной из рака. Кредит: iStock / Getty Images Plus
«Вместо того, чтобы полагаться на клинические параметры, мы можем отфильтровать пациентов, которые с большей вероятностью ответят на лечение, на основе набора конкретных биомаркеров», — говорит Вейгман. Разработчики лекарств быстро взяли на вооружение этот подход для продвижения кандидатов на лекарства и комбинированных методов лечения во все более и более загруженной сфере. Это также помогает предотвратить неудачи клинических испытаний из-за отсутствия реакции пациентов.
Еще предстоит решить некоторые технические проблемы, прежде чем NGS сможет широко применяться в клинической практике. Достижения в методах секвенирования направлены на решение вопросов, связанных с размером и качеством образцов опухолевой ткани, которые получают в клинике, а также на сокращение времени обработки, что имеет решающее значение для пациентов с агрессивными опухолями.
Захватывающим достижением является использование NGS для жидких биопсий для анализа ДНК, полученной из рака, которая может присутствовать в крови, циркулирующих раковых клетках или Т-клетках.Как активированные циркулирующие Т-клетки , 9, , так и TMB, измеренные с использованием ДНК, выделенной из опухолевых клеток 10 , коррелируют с реакцией пациентов на иммунотерапию рака. Возможность получения полезной информации о реакции на лечение на основе простого анализа крови предоставляет новые возможности для мониторинга и принятия решений о лечении.
Weigman с оптимизмом смотрит в будущее диагностики на основе NGS в клинической практике. «В течение следующих четырех-пяти лет терапевтические решения в клинике будут приниматься на основе тестов на геномные биомаркеры», — говорит он.
Учитывая, что все большее количество лекарств одобрены со связанным биомаркером (почти каждый четвертый в США) и что сопутствующие диагностические средства доказали свое влияние на продажи и выписанные рецепты 11 , спрос на такие тесты как никогда высок . «Четко определенная клиническая применимость и короткое время выполнения работ будут ключевыми для любой технологии NGS, которая будет принята для рутинного тестирования», — говорит Вейгман.
Чтобы помочь вступить в эту новую эру, Illumina в партнерстве с фармацевтическими и диагностическими компаниями разрабатывает сопутствующие диагностические версии тестов на основе NGS.«Мы очень рады, что в этом исследовании используется ряд продуктов Illumina», — говорит Хэмптон. Такие тесты, в конечном итоге, позволят нам больше узнать о раке и большему количеству пациентов получить пользу от иммунотерапии.
границ | Гибридные системы для ускорения декодирования действий в реальном времени на основе ЭЭГ в сценариях вождения автомобиля
Введение
Сегодняшний человек на работе должен постоянно взаимодействовать с объектами и окружающей средой для выполнения широкого спектра задач.В связи с этим область исследований нейроэргономики направлена на раскрытие нейронных основ нейрофизиологических процессов, участвующих во взаимодействии между пользователем и технической системой во время повседневной деятельности (Parasuraman, 2003; Dehais et al., 2020; Gramann et al. , 2021).
Из-за своей сложности одним из основных направлений деятельности нейроэргономики в реальном мире является вождение автомобиля (Navarro et al., 2018). Исследования показали, что поведение при вождении является конечным результатом одновременных психических процессов, таких как внимание, принятие решений, бдительность, двигательный и когнитивный контроль (Calhoun et al., 2002; Калхун и Перлсон, 2012). Вождение автомобиля может вызвать сонливость, утомляемость и увеличение нагрузки, и это одна из основных причин смерти во всем мире (Borghini et al., 2014). Для обеспечения безопасности дорожного движения очень важно иметь глубокое понимание тех психических процессов, лежащих в основе взаимодействий, существующих между водителем, автомобилем и внешней средой, для прогнозирования поведения человека, приводящего к рулевому управлению и торможению. В последние годы сценарии вождения обогатились технологическими достижениями в разработке автономных автомобилей (Badue et al., 2021). Однако даже если интеллектуальные системы могут выполнять действия от имени водителя, правильность этого выбора может быть оценена только после того, как мы поймем механизмы, лежащие в основе поведения водителя в смоделированных и реальных сценариях движения. В этом отношении опыт может быть важным фактором, который стоит учитывать, поскольку данные, собранные среди профессиональных и неспециализированных водителей, предполагают, что эти две группы имеют общие основные нейрофизиологические механизмы, тогда как опыт, обеспечивающий исключительные способности вождения, может быть связан со специфическими морфологическими и функциональными изменениями церебральной архитектуры. (Бернарди и др., 2013, 2014).
По этой причине было проведено несколько исследований для определения нейронной основы транспорта и вождения автомобиля. В недавнем метаанализе представлена нейроэргономическая структура, согласно которой нейронные основы поведения при вождении подразделяются на стратегические (например, навигация), тактические (например, обгон) и оперативные (рулевое управление и торможение) задачи (Navarro et al., 2018 ).
В этом контексте разработка эффективных мозговых систем для декодирования в реальном времени мозговых процессов, лежащих в основе поведения водителя, была бы очень полезной для разработки вспомогательных устройств.
Эта перспектива дает краткий обзор литературы о гибридных системах, используемых для прогнозирования действий, и связанных с ними ограничениях. Затем в нем представлены результаты, связанные со сценариями вождения автомобилей, как доказательство уровня технологической зрелости, достигнутого в последние годы. В этом контексте действия при вождении прогнозируются (i) с использованием вторичных задач, вызывающих церебральную активность, связанную с более высоким уровнем моторного контроля, и (ii) путем измерения нейронных коррелятов двигательной подготовки как маркера действий при торможении и рулевом управлении и.Этот методологический подход может принести пользу дополнительным экологическим сценариям в нейроэргономике, таким как телереабилитация и охрана труда.
От декодеров действий на основе ЭЭГ к гибридным системам
Электроэнцефалография (ЭЭГ) — один из наиболее часто используемых методов для мониторинга сигналов мозга в операционной среде. Эта мера обеспечивает изменение электрических потенциалов на поверхности кожи головы, создаваемое суммированием постсинаптических потенциалов в корковых слоях (Biasiucci et al., 2019). Электроэнцефалография имеет решающее преимущество в отслеживании динамики мозга с точностью до миллисекунд и используется в реальных сценариях для нейровизуализационных исследований вне лаборатории. Развитие технологий позволило удалить провода и создать носимые и долговечные записывающие устройства, что позволило проводить широкий спектр экспериментов в реальных условиях (Debener et al., 2012; Mihajlović et al., 2015; Mullen et al., 2015; Casson, 2019).
Интеграция прогнозов действий на основе ЭЭГ в управление вспомогательным технологическим устройством, например автомобилем, будет иметь большое преимущество, так как будет обнаруживать как можно раньше подготовку и выполнение движения, как в лаборатории, так и в более естественных условиях. параметры окружающей среды.Однако, несмотря на заметный технологический прогресс последнего десятилетия, все еще существует ряд проблем, которые ограничивают использование ЭЭГ для мониторинга действий в рабочей среде в реальном времени. Например, необходимо улучшить оборудование ЭЭГ, чтобы получить записи, более устойчивые к артефактам и увеличить время автономной работы, а также производить устройства меньшего размера, которые будут приняты обществом. Другие психофизиологические и технологические ограничения затрудняют выполнение этого прогноза в реальных сценариях.Такие факторы, как внимание, нагрузка на память, утомляемость и конкурирующие когнитивные процессы (Gonçalves et al., 2006; Käthner et al., 2014; Calhoun and Adali, 2016), а также индивидуальные характеристики пользователя, такие как образ жизни, пол и возраст. (Kasahara et al., 2015) влияют на динамику мозга, вызывая значительную внутри- и межпредметную изменчивость (Saha and Baumert, 2020; Saha et al., 2021). Общие артефакты ЭЭГ, возникающие в результате движений мышц и глаз, сдвигов импеданса, шума окружающей среды, обычно усиливаются в реальных сценариях, существенно влияя на качество сигналов ЭЭГ во время мониторинга в реальном времени (Waard, 1996; Zander et al., 2017; Лохани и др., 2019). Кроме того, ношение устройства ЭЭГ для пользователей в операционной среде может быть неудобным и приводить к нарушению основных мозговых процессов. Хотя эта технология предоставляет исследователям высокоимпедансные системы, оснащенные активными экранированными электродами для мобильных приложений, эти устройства не решают всех упомянутых проблем, характерных для всех экологических сред. Такое низкое отношение сигнал / шум, возвращаемое необработанными данными ЭЭГ, требует использования ряда концептуально очень разных и дорогостоящих в вычислительном отношении алгоритмов для извлечения важных временных и частотных характеристик ЭЭГ (Müller et al., 2004; Lotte et al., 2007, 2018; Крусенски и др., 2011; Bellotti et al., 2019). Эти алгоритмы часто требуют калибровки, поскольку требуют больших обучающих наборов и не устойчивы к реальным шумам окружающей среды, влияющим на записи ЭЭГ. Другие проблемы связаны с большой размерностью и нестационарностью данных ЭЭГ, влияющими на качество классификации (Lotte et al., 2018). Кроме того, большинство методов классификации, используемых в литературе, применяются для автономного анализа ЭЭГ, что требует улучшения этой методологии для онлайн-приложений, чтобы гарантировать вычислительную эффективность для декодирования активности мозга в реальном времени.Следовательно, вычислительное оборудование и программное обеспечение должны гарантировать достаточно высокую производительность и низкую задержку, чтобы сохранить ранний прогноз (Wöhrle et al., 2017).
Следовательно, различные физиологические, поведенческие и технические данные могут быть объединены для повышения надежности прогнозов на основе ЭЭГ и их полностью автоматизированного приложения для поддержки пользователя в самостоятельных движениях в критических условиях. Например, прогнозирование начала действий на основе анализа ЭЭГ может быть улучшено путем разработки гибридных систем, одновременно отслеживающих дополнительные периферические сигналы, такие как данные электрокулограммы (ЭОГ) и электромиографии (ЭМГ), в зависимости от требований контекста (Kirchner et al., 2014). Гибридная концепция была введена в области мозговых компьютерных интерфейсов (BCI), используя преимущества различных физиологических сигналов и вычислительных подходов, чтобы наконец достичь конкретных целей лучше, чем традиционная система на основе ЭЭГ, таких как повышение общей скорости классификации или снижение скорости ложных срабатываний (Pfurtscheller et al., 2010; Li et al., 2019). Гибридные системы должны полагаться, по крайней мере, на один сигнал мозга в виде электрических, магнитных или гемодинамических изменений, и в то же время они могут включать периферические или внешние сигналы для улучшения работы всей системы.Например, комбинации сигналов движения глаз с сигналами нейронов обычно используются для гибридных ИМК ЭЭГ-ЭОГ (Usakli et al., 2009, 2010; Ma et al., 2015; Hong and Khan, 2017). Следовательно, конструкция гибридных систем может улучшить производительность прогнозирования действий в зависимости от конкретного приложения.
Электроэнцефалография и сигналы ЭМГ могут использоваться для надежного прогнозирования движений до начала действия, показывая, что подходы мультимодального машинного обучения потенциально могут использоваться для управления электронным устройством (Kirchner et al., 2014; Wöhrle et al., 2017). Унимодальные прогнозы на основе ЭЭГ могут быть достигнуты раньше по сравнению с одномодальными прогнозами на основе ЭМГ, таким образом предполагая, что ЭЭГ больше подходит для создания у пользователя ощущения, что устройство обеспечивает своевременную поддержку без значительной задержки. Кроме того, анализ ЭЭГ приводит к большему количеству ложных срабатываний, чем ЭМГ, из-за более высокого отношения сигнал / шум, характеризующего такие нейронные данные. Кроме того, какие сигналы имеют значение, при каком состоянии планирования и выполнения движений систематически исследовались с помощью подходов машинного обучения для прогнозирования целей движения (Novak et al., 2013). В этом исследовании сообщается, что каждый способ восприятия имеет свои особенности. Электроэнцефалография подходит для очень раннего прогнозирования или если пользователь не может выполнить движение. Электромиография и положение руки точны после начала движения конечности. Айтрекинг точен в начале движения, но не может предсказать динамику движения. Объединение ЭЭГ и ЭОГ дает более высокую точность, чем использование унимодального подхода, и удобно, поскольку два сигнала часто измеряются вместе. Добавление ЭМГ с отслеживанием взгляда позволяет делать прогнозы раньше, чем с помощью только ЭМГ.Однако эта область исследований еще не созрела, чтобы проводить точные сравнения производительности и времени калибровки между подходами машинного обучения для одномодальных и мультимодальных измерений.
Эти гибридные системы также характеризуются рядом проблем. Одна из важных задач в этом исследовании — определение наилучших комбинаций сигналов для достижения наилучшего прогнозирования, поскольку оптимальная комбинация может различаться для разных пользователей и экспериментальных сценариев. Переменные, включая сложность системы, стоимость, рабочую нагрузку пользователя, необходимо оценивать при сравнении гибридных систем с одномодальными прогнозами.С точки зрения пользователя, сложность гибридных систем обычно выше, чем у обычных одномодальных записей, потому что они должны носить несколько датчиков мозга и тела. Приемлемость для пользователей — важнейший критерий, который необходимо учитывать при разработке и внедрении таких систем (Pfurtscheller et al., 2010; Li et al., 2019).
Гибридные системы в сценариях вождения автомобилей
В области исследований вождения в нескольких исследованиях рассматривалась проблема обнаружения и прогнозирования действий на основе различения различных характеристик ЭЭГ при моделировании (Haufe et al., 2011; Георге и др., 2013; Халилиардали и др., 2015; Ким и др., 2015; Vecchiato et al., 2018, 2020, 2021) и реальных сценариев вождения (Haufe et al., 2014; Zhang et al., 2015).
В нескольких исследованиях использовались вторичные задачи для выявления нейронных функций, предсказывающих рулевое управление во время имитации и реального вождения автомобиля. В частности, потенциал условных отрицательных вариаций (CNV) был создан с помощью задачи « годен / нет » для исследования декодирования событий вождения и торможения (Gheorghe et al., 2013; Khaliliardali et al., 2015). Результаты показали, что эти действия можно различить примерно за 320 мс до движения с классификационной характеристикой 0,77. Кроме того, Zhang et al. (2015) описали онлайн-классификатор негативности, связанной с событиями (ERN), для прогнозирования событий рулевого управления, руководствуясь направленным сигналом, как в лабораторных условиях, так и в реальных сценариях вождения автомобиля. В обоих экспериментальных условиях они определили правильное определение ошибки через 480 и 700 мс после сигнала направления. Эффективность классификации равна 0.70, но вычислительные затраты времени не сообщаются, поэтому временной интервал между сигналом направления и решением классификатора неизвестен, и, следовательно, наступает ли он до или после фактического выполнения движения.
В других исследованиях изучались действия водителя без использования внешних сигналов с преимуществом ограничения дополнительной умственной нагрузки водителя. Haufe et al. (2011) исследовали псевдо-онлайн-обнаружение экстренного торможения и оценили, что такая система в среде моделирования может в конечном итоге обнаруживать движение ног примерно за 130 мс до его начала.Также оценивалась возможность декодирования самогенерируемых действий, обнаруживающих рулевое управление, и, в частности, было предсказано, будет ли водитель менять полосу движения на смоделированном шоссе примерно на 800 мс раньше начала действия с истинно положительной скоростью 74,6% (Gheorghe et al. др., 2013). Кроме того, Vecchiato et al. (2018) идентифицировали независимый компонент ЭЭГ, связанный с лобно-центральными электродами, демонстрирующими синхронизацию тета-ритма ЭЭГ примерно за 800 мс до начала торможения.
В соответствии с концепцией гибридных систем Kim et al.(2015) предложили комбинацию характеристик ЭЭГ во временной и частотной областях, чтобы различать три различных типа тормозных ситуаций, вызванных стимулом (т. Е. Резкое, мягкое, без торможения). В этом исследовании сообщается о самой высокой производительности декодирования с синхронизацией отклика ЭЭГ при -480 и -420 мс, позволяющих отличить резкое и мягкое торможение от отсутствия торможения соответственно. Было труднее классифицировать условия резкого и мягкого торможения одним и тем же методом (наибольшая разница на -160 мс), который давал более низкие характеристики, чем классификатор, основанный на характеристиках EMG.Были также значительные результаты с гибридными системами декодирования в сценарии реального автомобиля, когда участников просили проехать по закрытой тестовой трассе (Haufe et al., 2014). Они сообщили, что гибридный (ЭЭГ и поведенческие особенности) классификатор обнаружил экстренное торможение даже раньше, чем в лабораторных условиях (примерно за 300 мс до начала торможения) (Haufe et al., 2011).
Более того, чтобы охарактеризовать относительный вклад ЭЭГ, связанный с подготовкой естественных и самопроизвольных действий рулевого управления во время вождения, чтобы исследовать его прогнозирующую способность, ЭЭГ, относящаяся к непрерывному рулевому управлению во время моделирования вождения, была протестирована с помощью канонический корреляционный анализ (CCA) и подход линейной запаздывающей регрессии (LLR) для определения относительного вклада сигналов ЭЭГ в управление ожиданием (Ди Либерто, принято).Результаты показали, что комбинация анализа CCA-LLR полезна для разделения относительного вклада поведенческих и электрофизиологических компонентов в сигналы ЭЭГ для прогнозирования управления в задаче моделирования непрерывного вождения. Этот результат демонстрирует, что сигналы ЭЭГ, связанные с мозгом, значительно улучшают общую производительность декодирования, показывая, что значительный вклад в прогнозирование управления вносят сигналы, не связанные с мозгом, такие как глазные и мышечные компоненты.
Мозговая и мышечная деятельность, лежащая в основе поведения рулевого, также была исследована с конечной целью повысить общую экологию экспериментальных условий (Vecchiato et al., 2021). В частности, функция ЭЭГ, предсказывающая действие рулевого управления и направление, определяемое реакцией на дорожные знаки, отображаемые на экране компьютера, была извлечена и позже использована для увеличения прогнозирующей способности ЭМГ, собранной в более экологичной задаче рулевого управления, такой как симуляция вождения. Десинхронизация мю-ритма во время моторной подготовки к неэкологическому рулевому управлению, управляемая дорожным знаком, распознавала мышечную активность дельтовидных мышц, таким образом, предвосхищая поведение рулевого управления субъекта на 1.5 с. Вдобавок увеличение ЭМГ-активности дельтовидных мышц ожидало контралатерального рулевого управления как в неэкологических, так и в экологических задачах рулевого управления на 200 и 500 мс относительно начала действия, что позволяло различать такое поведение при вождении. Хотя эти вариации активности ЭМГ появляются до начала действия, что позволяет делать возможные онлайн-прогнозы, данные ЭЭГ использовались для увеличения доступного времени для выполнения таких расчетов. Выявленная неэкологическая характеристика ЭЭГ коррелировала с экологической активностью ЭМГ дельтовидных мышц, обеспечивая улучшение способности распознавания стороны рулевого управления во время симуляции вождения (рис. 1).Эти результаты показывают подход к повышению экологии экспериментальных условий путем ограничения инвазивности нейрофизиологических измерений с использованием поверхностных датчиков ЭМГ в экологическом сценарии и объединения нейронных данных, собранных в неэкологическом сценарии. Этот подход обеспечивает способ мониторинга производительности пользователя в интерактивном режиме с помощью более простого получения мышечной корреляции по сравнению с нейронными данными, которые могут быть записаны в автономном режиме, чтобы повысить производительность системы декодирования, не влияя на сложность экологической обстановки.
Рис. 1. Рама NON-ECO . Частотно-временные паттерны ЭЭГ, собранные во время левого (A) и правого (B) неэкологического управления, а также их статистическое сравнение (C) . Топография в левой части изображения показывает среднюю карту скальпа, относящуюся к кластеру независимых компонентов. Рама ECO . ERSP для сигналов ЭМГ, собранных во время неэкологической задачи управления (A – F) , и результаты взаимной корреляции между данными ЭЭГ и ЭМГ (G – L) .Первая (вторая) строка (сверху) иллюстрирует EMG ERSP для левой (правой) дельтовидной мышцы при левом и правом рулевом управлении, а также их статистическое сравнение. Третья (четвертая) строка иллюстрирует значения взаимной корреляции ЭЭГ-ЭМГ для левой (правой) дельтовидной мышцы при левом и правом рулевом управлении, а также статистическое сравнение этих двух состояний. Белые линии обозначают профили угла поворота левого и правого рулевого колеса. Цветные полосы показывают синим (красным) уменьшение (увеличение) ЭЭГ, ЭМГ и взаимной корреляции, а также статистические различия, соответствующие уменьшению (увеличению) такой активности во время левого (правого) поворота.Белая и черная маски ограничивают статистически значимую часть панелей кросс-корреляции ЭЭГ, ЭМГ (адаптировано из Vecchiato et al., 2021).
Выводы
Связь между ЭЭГ, ЭМГ и сигналами глаза является действенным механизмом для использования гибридных систем для обнаружения и онлайн-прогнозирования движущихся действий, демонстрируя, как можно было бы дополнить информацию из поведенческих, физиологических и внешних источников для контроля уровня помощи, необходимой водителю в этом контексте (Chavarriaga et al., 2018). Эта методология может проложить путь к использованию гибридных систем, основанных на нейронных сигналах, собранных в стандартных лабораторных условиях и обработанных в автономном режиме, имеющих роль в улучшении предсказательной силы периферийных сигналов, собранных в более экологических условиях и, возможно, обработанных в режиме онлайн, связанных с предстоящее исполнение действия.
Прогнозирующая сила, получаемая при объединении ЭЭГ с периферийными сигналами, продемонстрированными в сценариях вождения автомобиля, может быть дополнительно исследована в более широких наборах действий, чтобы распространить применимость этого подхода на другие нейроэргономические области.Например, эта методология может способствовать распространению мобильных приложений для мозга и тела (Makeig et al., 2009; Gramann et al., 2011) и парадигм BCI (Douibi et al., 2021; Saha et al., 2021) на несколько другие контексты нашей повседневной жизни. Возможность удаленного экологического мониторинга действий человека окажет огромное влияние на область реабилитации (Nuara et al., 2021), с возможностью проверки соблюдения режима лечения и его приверженности, что избавит пациента и лиц, осуществляющих уход, от огромного бремени. с точки зрения времени и затрат.Приложения также могут выходить за пределы клинической области, практически в любые области, где надзор за действиями может быть полезен для предотвращения вредных последствий. Это касается, например, безопасности труда рабочих, которые в своей рутинной работе используют небезопасные методы работы, для которых использование этой экологической методологии могло бы снизить вероятность профессиональных травм во время выполнения двигательных задач с высоким риском (Rizzolatti et al. ., 2021).
Заявление о доступности данныхОригинальные материалы, представленные в исследовании, включены в статью / дополнительные материалы, дальнейшие запросы можно направлять соответствующим авторам.
Авторские взносы
Автор подтверждает, что является единственным соавтором данной работы, и одобрил ее к публикации.
Финансирование
Это исследование получило финансирование от CAMLIN Limited. Спонсор не участвовал в написании этой статьи или решении представить ее для публикации.
Конфликт интересов
Автор заявляет, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Примечание издателя
Все утверждения, выраженные в этой статье, принадлежат исключительно авторам и не обязательно отражают претензии их дочерних организаций или издателей, редакторов и рецензентов. Любой продукт, который может быть оценен в этой статье, или заявление, которое может быть сделано его производителем, не подлежат гарантии или одобрению со стороны издателя.
Благодарности
Настоящее исследование было поддержано соглашением об исследованиях между CAMLIN Limited и IN-CNR и соглашением об исследованиях между CAMLIN Limited и Toyota Motor Europe.Автор благодарит Марию Дель Веккьо за проницательные комментарии, которые она предоставила к черновикам этой рукописи.
Список литературы
Бадуэ, К., Гуидолини, Р., Карнейро, Р. В., Азеведо, П., Кардосо, В. Б., Форечи, А. и др. (2021 г.). Беспилотные автомобили: обзор. Expert Syst. Прил. 165, 113816. doi: 10.1016 / j.eswa.2020.113816
CrossRef Полный текст | Google Scholar
Беллотти, А., Антопольский, С., Марченкова, А., Колуччиелло, А., Avanzini, P., Vecchiato, G., et al. (2019). «Мозговое управление автомобильной информационно-развлекательной системой», Международная конференция IEEE 2019 по системам, человеку и кибернетике (SMC) (Бари), 2166–2173. DOI: 10.1109 / SMC.2019.88
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Бернарди, Г., Чеккетти, Л., Ханджарас, Г., Сани, Л., Гаглианезе, А., Чеккарелли, Р., и др. (2014). Дело не только в вашей машине: функциональные и структурные корреляты исключительных навыков вождения профессиональных гонщиков. Фронт. Гм. Neurosci. 8, 888. doi: 10.3389 / fnhum.2014.00888
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Бернарди, Г., Риккарди, Э., Сани, Л., Гаглианезе, А., Папасогли, А., Чеккарелли, Р., и др. (2013). Как профессиональные навыки формируют функциональную архитектуру мозга: исследование с помощью фМРТ визуально-пространственной и моторной обработки у профессиональных гонщиков и наивных водителей. PLoS ONE 8, e77764. DOI: 10.1371 / journal.pone.0077764
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Боргини, Г., Астольфи, Л., Веккиато, Г., Маттиа, Д., и Бабилони, Ф. (2014). Измерение нейрофизиологических сигналов у пилотов самолетов и водителей автомобилей для оценки умственной нагрузки, утомляемости и сонливости. Neurosci. Biobehav. Ред. 44, 58–75. DOI: 10.1016 / j.neubiorev.2012.10.003
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Калхун, В. Д., Адали, Т. (2016). Изменяющаяся во времени связь мозга в данных фМРТ: подходы на основе данных всего мозга для захвата и характеристики динамических состояний. Сигнальный процесс IEEE. Mag. 33, 52–66. DOI: 10.1109 / MSP.2015.2478915
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Калхун, В. Д., Перлсон, Г. Д. (2012). Выборочный обзор исследований моделирования вождения: сочетание натуралистической и гибридной парадигм, подходов к анализу и будущих направлений. Neuroimage 59, 25–35. DOI: 10.1016 / j.neuroimage.2011.06.037
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Калхун, В.Д., Пекар, Дж. Дж., МакГинти, В. Б., Адали, Т., Уотсон, Т. Д., и Перлсон, Г. Д. (2002). Различная динамика активации в нескольких нейронных системах во время имитации вождения. Hum. Brain Mapp. 17, 141–142. DOI: 10.1002 / hbm.10066
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Чаварриага Р., Ушчумлич М., Чжан Х., Халилиардали З., Айдарханов Р., Саиди С. и др. (2018). Расшифровка нейронных коррелятов когнитивных состояний для улучшения впечатлений от вождения. IEEE Trans. Emerg. Верхний. Comput. Intell. 2, 288–297. DOI: 10.1109 / TETCI.2018.2848289
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Дебенер, С., Миноу, Ф., Эмкес, Р., Гандрас, К., и де Вос, М. (2012). Как насчет того, чтобы взять на прогулку недорогую, маленькую и беспроводную ЭЭГ ?: ЭЭГ с собой. Психофизиология 49, 1617–1621. DOI: 10.1111 / j.1469-8986.2012.01471.x
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Дехаис, Ф., Карвовски В. и Аяз Х. (2020). Мозг на работе и в повседневной жизни как новый рубеж: сложные задачи нейроэргономики. Фронт. Нейроэргон. 1, 583733. doi: 10.3389 / fnrgo.2020.583733
CrossRef Полный текст | Google Scholar
Di Liberto, G, Barsotti, M, Vecchiato, G, Ambeck-Madsen, J, Del Vecchio, M, и Avanzini, P. (принято). Устойчивое прогнозирование непрерывных действий рулевого управления на основе электроэнцефалографических данных во время имитации вождения. Sci.Реп.
Дуйби, К., Ле Барс, С., Лемонти, А., Наг, Л., Балп, Р., и Бреда, Г. (2021 г.). К приложениям BCI на основе ЭЭГ для Индустрии 4.0: проблемы и возможные приложения. Фронт. Гм. Neurosci. 15, 705064. doi: 10.3389 / fnhum.2021.705064
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Георге, Л., Чаварриага, Р., Миллан, Дж. Д. Р. (2013). «Прогнозирование времени рулевого управления в задаче на симуляторе вождения», 2013 35-я ежегодная международная конференция Общества инженеров в медицине и биологии IEEE (EBC) (Пискатауэй, штат Нью-Джерси), 6913–6916.DOI: 10.1109 / EMBC.2013.6611147
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Gonçalves, S. I., de Munck, J. C., Pouwels, P. J. W., Schoonhoven, R., Kuijer, J. P.A., Maurits, N.M., et al. (2006). Корреляция альфа-ритма с BOLD с использованием одновременной ЭЭГ / фМРТ: межсубъектная вариабельность. Neuroimage 30, 203–213. DOI: 10.1016 / j.neuroimage.2005.09.062
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Граманн, К., Gwin, J. T., Ferris, D. P., Oie, K., Jung, T.-P., Lin, C.-T., et al. (2011). Познание в действии: визуализация динамики мозга / тела у мобильных людей. Rev. Neurosci. 22, 593–608. DOI: 10.1515 / RNS.2011.047
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Граманн К., Маккендрик Р., Болдуин К., Рой Р. Н., Жене К., Мета Р. К. и др. (2021 г.). Основные задачи когнитивной нейроэргономики в ближайшее десятилетие. Фронт. Нейроэргон. 2, 643969.DOI: 10.3389 / fnrgo.2021.643969
CrossRef Полный текст | Google Scholar
Haufe, S., Kim, J.-W., Kim, I.-H., Sonnleitner, A., Schrauf, M., Curio, G., et al. (2014). Обнаружение намерения экстренного торможения при реальном вождении на основе электрофизиологии. J. Neural Eng. 11, 056011. doi: 10.1088 / 1741-2560 / 11/5/056011
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Haufe, S., Treder, M. S., Gugler, M. F., Sagebaum, M., Curio, G., и Бланкерц, Б. (2011). Потенциалы ЭЭГ предсказывают предстоящее экстренное торможение во время имитации вождения. J. Neural Eng. 8, 056001. DOI: 10.1088 / 1741-2560 / 8/5/056001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Хонг, К.-С., и Хан, М. Дж. (2017). Гибридные методы интерфейса мозг-компьютер для повышения точности классификации и увеличения количества команд: обзор. Фронт. Нейроробот. 11, 35. doi: 10.3389 / fnbot.2017.00035
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Касахара, К., ДаСалла, К. С., Хонда, М., и Ханакава, Т. (2015). Нейроанатомические корреляты производительности интерфейса мозг-компьютер. NeuroImage 110, 95–100. DOI: 10.1016 / j.neuroimage.2015.01.055
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Кэтнер И., Врисснеггер С. К., Мюллер-Пуц Г. Р., Кюблер А. и Гальдер С. (2014). Влияние умственной нагрузки и утомления на мощность P300, альфа- и тета-диапазонов во время работы интерфейса мозг-компьютер ERP (P300). Biol. Psychol. 102, 118–129. DOI: 10.1016 / j.biopsycho.2014.07.014
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Халилиардали, З., Чаварриага, Р., Георге, Л. А., Миллан, Дж. И дель, Р. (2015). Прогнозирование действий на основе упреждающих потенциалов мозга во время имитации вождения. J. Neural Eng. 12, 066006. DOI: 10.1088 / 1741-2560 / 12/6/066006
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ким, И.-H., Kim, J.-W., Haufe, S., and Lee, S.-W. (2015). Обнаружение намерения торможения в различных ситуациях во время имитации вождения на основе комбинации характеристик ЭЭГ. J. Neural Eng. 12, 016001. DOI: 10.1088 / 1741-2560 / 12/1/016001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Кирхнер, Э.А., Таби, М., Силанд, А. (2014). Прогнозирование мультимодальных перемещений — в сторону индивидуальной помощи пациентам. PLoS ONE 9, e85060. DOI: 10,1371 / журнал.pone.0085060
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Крусиенски, Д. Дж., Гросс-Вентруп, М., Галан, Ф., Койл, Д., Миллер, К. Дж., Форни, Э., и др. (2011). Критические проблемы современной обработки сигналов интерфейса мозг-компьютер. J. Neural Eng. 8, 025002. DOI: 10.1088 / 1741-2560 / 8/2/025002
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ли З., Чжан С. и Пань Дж. (2019). Достижения в гибридных интерфейсах мозг-компьютер: принципы, дизайн и приложения. Вычисл. Intell. Neurosci. 2019, e3807670. DOI: 10.1155 / 2019/3807670
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Лохани М., Пейн Б. Р. и Страйер Д. Л. (2019). Обзор психофизиологических показателей для оценки когнитивных состояний при вождении в реальном мире. Фронт. Гм. Neurosci. 13, 57. doi: 10.3389 / fnhum.2019.00057
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Лотте, Ф., Бугрен, Л., Цихоцкий, А., Clerc, M., Congedo, M., Rakotomamonjy, A., et al. (2018). Обзор алгоритмов классификации для интерфейсов мозг-компьютер на основе ЭЭГ: обновление за 10 лет. J. Neural Eng. 15, 031005. doi: 10.1088 / 1741-2552 / aab2f2
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Лотте, Ф., Конгедо, М., Лекуйе, А., Ламарш, Ф., и Арнальди, Б. (2007). Обзор алгоритмов классификации интерфейсов мозг-компьютер на основе ЭЭГ. J. Neural Eng. 4, R1 – R13.DOI: 10.1088 / 1741-2560 / 4/2 / R01
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ма, Дж., Чжан, Ю., Цихоцки, А., и Мацуно, Ф. (2015). Новый гибридный человеко-машинный интерфейс EOG / EEG, использующий движения глаз и ERP: приложение для управления роботами. IEEE Trans. Биомед. Англ. 62, 876–889. DOI: 10.1109 / TBME.2014.2369483
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Макейг, С., Граманн, К., Юнг, Т.-П., Сейновски, Т.Дж., И Пойзнер, Х. (2009). Связывание мозга, разума и поведения. Внутр. J. Psychophysiol. 73, 95–100. DOI: 10.1016 / j.ijpsycho.2008.11.008
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Михайлович В., Грюндленер Б., Вуллерс Р. и Пендерс Дж. (2015). Носимые беспроводные решения для ЭЭГ в повседневной жизни: чего нам не хватает? IEEE J. Biomed. Здоровье Информ. 19, 6–21. DOI: 10.1109 / JBHI.2014.2328317
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Маллен, Т.R., Kothe, C.A.E., Chi, Y.M., Ojeda, A., Kerth, T., Makeig, S., et al. (2015). Нейровизуализация и когнитивный мониторинг в реальном времени с использованием носимой сухой ЭЭГ. IEEE Trans. Биомед. Англ. 62, 2553–2567. DOI: 10.1109 / TBME.2015.2481482
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Мюллер, К.-Р., Крауледат, М., Дорнхеге, Г., Курио, Г., и Бланкерц, Б. (2004). Методы машинного обучения для интерфейсов мозг-компьютер. Биомед. Англ. 49, 11–22.DOI: 10.13109 / 9783666351419.11
CrossRef Полный текст | Google Scholar
Наварро, Дж., Рейно, Э., и Осиурак, Ф. (2018). Нейроэргономика вождения автомобиля: критический мета-анализ данных нейровизуализации человеческого мозга за рулем. Neurosci. Biobehav. Ред. 95, 464–479. DOI: 10.1016 / j.neubiorev.2018.10.016
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Новак Д., Омлин X., Лейн-Хесс Р. и Ринер Р. (2013). Предсказание движений людей, достигающих цели, с использованием различных технологий распознавания. IEEE Trans. Биомед. Англ. 60, 2645–2654. DOI: 10.1109 / TBME.2013.2262455
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Нуара А., Фаббри-Дестро М., Скалона Э., Лензи С. Э., Риццолатти Г. и Аванзини П. (2021 г.). Телереабилитация в ответ на ограниченное физическое расстояние: возможность переосмыслить нейрореабилитационные процедуры. Дж. Нейрол . 2021, 1–12. DOI: 10.1007 / s00415-021-10397-w
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Парасураман Р.(2003). Нейроэргономика: исследования и практика. Теор. Проблемы Ergon. Sci. 4, 5–20. DOI: 10.1080 / 14639220210199753
CrossRef Полный текст | Google Scholar
Pfurtscheller, G., Allison, B.Z., Brunner, C., Bauernfeind, G., Solis-Escalante, T., Scherer, R., et al. (2010). Гибрид BCI. Фронт. Neurosci. 4, 30. doi: 10.3389 / fnpro.2010.00003
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Риццолатти, Г., Фаббри-Дестро, М., Нуара, А., Гатти, Р., и Аванзини, П. (2021). Роль зеркального механизма в восстановлении, поддержании и приобретении двигательных способностей. Neurosci. Biobehav. Ред. 127, 404–423. DOI: 10.1016 / j.neubiorev.2021.04.024
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Саха, С., и Баумерт, М. (2020). Внутри- и межпредметная вариабельность сенсомоторного компьютерного интерфейса на основе ЭЭГ: обзор. Фронт. Comput. Neurosci. 13, 87. DOI: 10.3389 / fncom.2019.00087
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Саха, С., Мамун, К. А., Ахмед, К., Мостафа, Р., Наик, Г. Р., Дарвиши, С. и др. (2021 г.). Прогресс в интерфейсе мозг-компьютер: проблемы и возможности. Фронт. Syst. Neurosci. 15, 578875. doi: 10.3389 / fnsys.2021.578875
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Усакли, А. Б., Гуркан, С., Алоиза, Ф., Веккьято, Г., и Бабилони, Ф. (2009).«Гибридная платформа на основе сигналов ЭОГ и ЭЭГ для восстановления коммуникации для пациентов, страдающих прогрессирующими заболеваниями двигательных нейронов», — в материалах конференции . Ежегодная международная конференция общества инженеров IEEE в медицине и биологии. Общество инженеров IEEE в медицине и биологии. Ежегодная конференция 2009 г. (Миннеаполис, Миннесота), 543–546. DOI: 10.1109 / IEMBS.2009.5333742
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Усаклы, А.Б., Гуркан, С., Алоиза, Ф., Веккьято, Г., и Бабилони, Ф. (2010). Об использовании электроокулограммы для эффективных человеко-компьютерных интерфейсов. Вычисл. Intell. Neurosci. 2010, 135629. DOI: 10.1155 / 2010/135629
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Веккьято, Г., Дель Веккьо, М., Антопольский, С., Беллотти, А., Колуччиелло, А., Марченкова, А., и др. (2020). «Альфа- и бета-десинхронизация ЭЭГ предполагает действия рулевого управления в эксперименте по моделированию вождения», в Intelligent Human Systems Integration 2020.Достижения в области интеллектуальных систем и вычислений , ред. Т. Ахрам, В. Карвовски, А. Верньяно, Ф. Лили и Р. Тайар (Cham: Springer International Publishing), 260–265. DOI: 10.1007 / 978-3-030-39512-4_41
CrossRef Полный текст | Google Scholar
Веккьято, Г., Веккио, М. Д., Амбек-Мадсен, Дж., Аскари, Л., и Аванзини, П. (2021 г.). Гибридная система ЭЭГ-ЭМГ для определения действий рулевого управления в условиях вождения автомобиля. Препринт BioRxiv . DOI: 10.1101 / 2021.09.16.460615
CrossRef Полный текст | Google Scholar
Vecchiato, G., Веккио, М. Д., Аскари, Л., Антопольский, С., Деон, Ф., Кубин, Л. и др. (2018). Электроэнцефалографические частотно-временные закономерности подготовки торможения и ускорения движения при моделировании вождения автомобиля. Мозг Res . 1716, 16–26. DOI: 10.1016 / j.brainres.2018.09.004
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Вёрле, Х., Таби, М., Ким, С. К., Кирхнер, Ф., и Киршнер, Э. А. (2017). Гибридная система на основе ПЛИС для онлайн-прогнозирования движения на основе ЭЭГ и ЭМГ. Датчики 17, 1552. doi: 10.3390 / s17071552
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Зандер, Т.О., Андреессен, Л.М., Берг, А., Блеуэл, М., Павлицки, Дж., Заваллич, Л. и др. (2017). Оценка системы сухой ЭЭГ для применения пассивных интерфейсов мозг-компьютер в автономном вождении. Фронт. Гм. Neurosci. 11, 78. doi: 10.3389 / fnhum.2017.00078
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Чжан, Х., Chavarriaga, R., Khaliliardali, Z., Gheorghe, L., Iturrate, I., Millán, J., et al. (2015). Расшифровка связанной с ошибкой мозговой активности на основе ЭЭГ в реальной задаче вождения. J. Neural Eng. 12, 066028. DOI: 10.1088 / 1741-2560 / 12/6/066028
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Анализ времени распознавания водителем различных комбинаций дорожных знаков на городских дорогах с помощью моделирования вождения
Учитывая влияние комбинаций дорожных знаков (TSC) на визуальное распознавание водителя, в этой статье проанализировано влияние на процесс визуального распознавания водителя.Он использовал теорию когнитивной психологии, чтобы установить модель передачи информации во время комбинации дорожных знаков. Он абстрагировал модель передачи информации, чтобы построить модель обработки информации водителя. Одновременно, согласно анализу сочетаний дорожных знаков на городских дорогах, в этой статье был проведен тест моделирования визуального распознавания водителя при объединении дорожных знаков, измерено время реакции визуального распознавания водителем нескольких комбинаций дорожных знаков и проанализировали диапазон времени распознавания водителя (DRT) в комбинациях дорожных знаков.Он использовал корреляционный анализ, надежную оценку, полиномиальную регрессию и другие методы, чтобы получить значимую взаимосвязь между временем распознавания водителем в различных комбинациях дорожных знаков (DTSC). Затем он построил модели полиномиального регрессионного анализа, подобрал данные и визуализировал результаты подбора. Результаты показывают, что благодаря анализу экспериментальных данных, основанному на обеспечении определенной точности, время распознавания водителем комбинаций дорожных знаков городской дороги увеличилось соответствующим образом.Существует значительная взаимосвязь между различными комбинациями дорожных знаков и временем распознавания водителем. По мере увеличения количества дорожных знаков время распознавания водителя значительно увеличивается. Кроме того, при определенных условиях пол, возраст и стаж вождения будут влиять на время распознавания водителем при комбинации дорожных знаков. Результаты исследования могут обеспечить соответствующую теоретическую основу для установки городских дорожных знаков, послужить мощным справочным материалом для пересмотра различных стандартов и норм, устанавливающих дорожные знаки, и предоставить идеи для будущих исследований системы знаков.
1. Введение
В последние годы, с быстрым развитием экономики, урбанизация постепенно ускорилась. Как неотъемлемая часть городской дорожной сети, дорожные знаки играют важную роль, особенно в точности передачи информации о дорожном движении, направлении движения и своевременности правил дорожного движения. Поэтому, чтобы добиться максимального эффекта от городских дорожных знаков, многие эксперты и ученые провели большую исследовательскую работу и достигли некоторых плодотворных результатов.
Что касается правил и стандартов, «Руководство по унифицированным устройствам управления движением» [1] в США улучшает правила дорожного движения и классифицирует их в зависимости от пункта назначения путешественника. В зависимости от характеристик разных городских территорий особое внимание уделяется планировке и отображению информации дорожных знаков. Чтобы максимально удовлетворить повседневные потребности жителей в поездках, максимальное количество съездов в пункт назначения отмечается как желаемая точка.А с быстрым развитием городской транспортной сети качество обслуживания улучшается. В японском «Руководстве по разметке дорог» [2], касающемся конструкции городских дорожных знаков, содержатся единые положения. Он включает изготовление вывесок, размещение и т. Д. И имеет стандартные правила. В то же время, когда водитель путешествует ночью, разные материалы имеют разную степень люминесценции, и степень успешности информации о метках водителя на разных материалах также разная. В китайских «Знаках и разметке дорожного движения» [3] и «Правилах размещения знаков и разметки городского движения» [4] изложены основные принципы, а также цвет, форма, рисунок и требования к знакам.Они классифицировали дорожные знаки и указали требования к конструкции, изготовлению, установке и конструкции дорожных знаков. Они основаны на многолетнем опыте управления дорожным движением и текущей ситуации развития дорожного движения, а также на внедрении новых стандартов дорожных знаков, так что дорожные знаки становятся более полными, привлекательными и научными. Кроме того, существуют Европейская «Конвенция о дорожных знаках и сигналах» и Канадское «Руководство по дорожным знакам и разметке».
В академических исследованиях Dutta et al.[5] исследовали, что когда сообщение представляется в течение относительно короткого времени и повторяется дважды, водитель может получить больше информации. Эдквист и др. [6] выяснили, что рекламные щиты могут изменять режим визуального внимания водителя, и время, необходимое водителям для распознавания дорожных знаков, увеличивается. Rogé et al. [7] исследовали, что с увеличением возраста и скорости водителя симуляция увеличивает время вождения, и поле зрения водителя ухудшается. Filtness et al. [8] исследовали, что если сложность дорог увеличивается, количество дорожных знаков соответственно возрастает, и исследования показывают, что установка нескольких дорожных знаков на одном указателе может решить проблему недостаточного количества дорожных знаков на узких участках дороги.Вилчез [9] проанализировал дорожные знаки с познавательной точки зрения и определил их влияние на траекторию движения транспортного средства в задачах моделирования вождения. Лю и др. [10] проанализировали среднее время взгляда водителя с помощью инструмента для движения глаз. И результаты показали, что визуальный эффект от дорожных знаков на нового водителя был больше, чем у опытного экзамена по вождению. Jiang et al. [11] изучили время взгляда дорожного знака. Они обнаружили, что время взгляда увеличивалось со скоростью и количеством названий дорог.Du et al. [12] провели эксперименты с избыточностью информации на обочине дороги, чтобы помешать визуальному распознаванию водителя. Они обнаружили, что на вождение автомобиля наибольшее влияние оказали вспомогательная информация и звездная реклама. Zhao et al. [13] исследовали взаимосвязь между поведением при вождении и расположением предупреждающих знаков с помощью тестов моделирования вождения. Zhang et al. [14] проанализировали метод распознавания отвлечения водителя и установили распознавание состояния. Xiong et al. [15] проанализировали факторы, влияющие на симуляцию вождения на внимательность водителя.С точки зрения зрительной функции Schnell et al. [16] исследовали влияние яркости и размера шрифта на время распознавания дорожных знаков и точность передачи информации. Результаты показывают, что более крупные и яркие знаки могут более эффективно передавать информацию водителю, сокращать время сбора информации и повышать точность передачи. Забихи и др. [17] предложили метод тестирования, основанный на принципе человеческого зрения, для обнаружения и идентификации дорожных знаков в поле зрения водителя.Хуанг и др. [18] взяли факторы водителя в качестве исследовательской точки зрения и проанализировали их, которые оказывают значительное влияние на понимание водителем информации о знаках. Согласно результатам исследования, существенное влияние оказывают такие факторы, как пол, уровень дохода и уровень образования. Также водители в разных странах имеют разный уровень понимания. Ellahyani et al. [19] предложили новый метод обнаружения и распознавания дорожных знаков, протестированный на немецком тесте обнаружения и распознавания дорожных знаков и шведском наборе данных дорожных знаков, и дали хорошие результаты.Он и Дай [20] сосредоточились на извлечении признаков дорожных указателей и предложили новый метод, который сочетает локальные и глобальные особенности для определения дорожных указателей. Результаты исследования показывают, что точность этого метода достигает 97,67%, что лучше, чем метод одиночного признака, и значительно сокращает время распознавания. Чао и др. [21] предложил метод расчета специальных указателей для снижения мер ветровой нагрузки, экономии строительных материалов и затрат. Вогальтер и Барлоу [22] взяли водителя в качестве объекта исследования, проанализировали социальное влияние на психологическую деятельность водителя и выделили необходимые факторы для дизайна дорожных знаков.Ли и др. [23] изучили результаты и предложили добавить информацию о прямой на дорожный знак перекрестка. Это показывает, что улучшение поможет водителю оценить соотношение положения на пути и повысить эффективность визуального распознавания. Ли и др. [24, 25] проанализировали желательность расположения знаков, положение установки знаков, фокусировку важной информации о направляющих знаках различных позиций за рубежом, а также применение графики расположения и форм знаков отечественных дорожных знаков и т. Д.Предложения по улучшению имеют справочное значение при разработке и пересмотре дорожных знаков в реальных проектах. Лю и др. [26] рассматривали визуальное распознавание внешней среды, расположение знака, макет знака и его информацию. Они предложили десять показателей для оценки знака.
Таким образом, существующее исследование сделало некоторые теоретические достижения в области анализа распознавания дорожных знаков, блокировки дорожных знаков, проектирования расположения дорожных знаков и оценки воздействия установки указателей направления движения [27–39].Большая часть исследований сосредоточена на одном дорожном знаке (OTS). Однако на самом деле существуют разные дорожные знаки. Так что это не только позволяет сэкономить средства и эффективно использовать ресурсы, но и дает полную свободу действий дорожным знакам. Поэтому в данной статье анализируется система передачи информации, когда дорожные знаки объединены с когнитивной психологией, и строится ее модель передачи информации. Путем абстрагирования модели трансмиссии в документе была получена модель обработки информации водителя. В ходе анализа модели и исследования было проведено моделирование вождения с различными комбинациями дорожных знаков (DTSC).С помощью надежной оценки, корреляционного анализа, полиномиальной регрессии и других методов обработки и анализа данных в статье исследуется и исследуется взаимосвязь между временем распознавания водителя (DRT) во время различных комбинаций дорожных знаков (DTSC). В нем также обсуждаются и анализируются другие возможные факторы, влияющие на время визуального распознавания дорожных знаков.
2. Механизм передачи и обработки информации
2.1. Механизм передачи информации о дорожных знаках
Независимо от того, является ли правильная идентификация дорожных знаков для передачи информации важной гарантией безопасного вождения, DTSC будет влиять на процесс распознавания водителя.
Процесс восприятия дорожных знаков водителем в целом можно разделить на пять этапов [40]: (1) обнаружение, (2) узнавание, (3) познание, (4) понимание и принятие решений, и (5) реакция и операция. Анализ когнитивной психологии показывает, что графика и символы являются носителями передачи информации. При визуальном распознавании основная цель водителей — получить больше информации, передаваемой дорожными знаками. Следовательно, он может использовать модель системы связи для построения модели передачи информации DTSC на городской дороге.Принципиальная схема модели передачи информации в DTSC представлена на рисунке 1.
2.2. Механизм обработки информации водителя
Анализируются модель передачи информации водителя и теория когнитивной психологии. Процесс получения, обработки, хранения и использования соответствующей информации о дорожных знаках в когнитивном процессе абстрагируется, чтобы построить информационную модель для водителя для обработки DTSC, как показано на рисунке 2. Таким образом, степень внешней информации, принимаемой драйвер напрямую связан с его способностью эффективно обрабатывать информацию.Дорожные знаки являются основным телом, несущим информацию, и их визуальное распознавание напрямую влияет на восприятие информации водителем. DTSC передает слишком много информации. И это вызовет серьезную визуальную нагрузку на водителя, тем самым уменьшив степень узнаваемости водителя и повлияв на разумность установки знаков.
3. Методы
3.1. Имитационный тест
В этой статье метод имитации в помещении используется для распознавания дорожных знаков.Согласно принципу эргономики, он создает интерфейс человек-компьютер, использует AutoCAD, Photoshop и другое программное обеспечение для рисования соответствующих городских дорожных знаков, создает определенную комбинацию дорожных знаков, а затем проводит эксперимент по процессу визуального распознавания. предметов и записывает различное время реакции водителя. Эксперимент можно разделить на два этапа: (i) этап подготовки: (1) рисование дорожных знаков, (2) отладка тестовых инструментов, (3) набор испытуемых и т. Д. (Ii) этап визуального распознавания испытуемого: (1) подавать определенный комбинированный знак, (2) выполнять тест процесса визуального распознавания на испытуемых, (3) записывать различные соответствующие данные испытуемых и т. д.
3.1.1. Подготовка к тесту
В данной работе методом случайной выборки было отобрано в общей сложности 20 испытуемых. С учетом разного возраста, пола и возраста вождения, как показано на Рисунке 3, корректирующее зрение выше 1,0.
В тесте использовалось в общей сложности 15 групп дорожных знаков для эксперимента, который включает (1) один дорожный знак (OTS), (2) два вида комбинаций дорожных знаков (TTSC) и (3) три вида комбинаций дорожных знаков (TKTSC).Было четыре типа знаков, таких как запрещающие знаки, предупреждающие знаки, указатели и указатели. Дорожные знаки должны быть нарисованы в соответствии с соответствующими стандартами [3, 4] и не должны противоречить положениям или реалистичным настройкам ситуации. Диаграмма различных типов DTSC в тесте показана в Таблице 1.
| ||||||||||||||||||||||||||||||||||||||
3.1.2. Тест на визуальное распознавание
Он использовал эргономические принципы для получения данных о реакции различных приводов во время распознавания дорожных знаков. Принципиальная схема блок-схемы показана на рисунке 4. (1) Экспериментаторы разместили испытуемых в определенном положении. (2) Они объяснили испытуемым правила и цель эксперимента. (3) Они использовали компьютер. играть на различных заранее подготовленных комбинированных дорожных знаках, чтобы ознакомить испытуемых с процессом. (4) В формальном эксперименте экспериментаторы записывали соответствующие данные испытуемых по очереди, пока все испытуемые не заканчивали эксперимент.(5) Экспериментаторы подсчитали данные различных экспериментов.
3.2. Модель робастного оценивания
Теория робастного оценивания — это применение принципа наименьших квадратов. В неизбежном случае грубости выбор метода оценки для минимизации влияния неизвестной оценки для достижения наилучшей оценки в нормальном режиме является распространенным методом обработки экспериментальных данных в прикладных исследованиях эргономики [41]. Чтобы уменьшить изменчивость собранных данных из-за системы, действий человека и т. Д.используйте теорию робастного оценивания для обработки и анализа экспериментальных данных. После сравнения пробных расчетов используйте набор показателей в зависимости от взвешенного расчета выборки данных следующим образом: где — вес тестовых данных, — количество TSC, — номер испытуемого, — время распознавания группы th предмет (ов), и это среднее время распознавания групповых дорожных знаков (ов).
Рассчитайте средневзвешенное значение DRT для DTSC и вычислите формулу, где — средневзвешенное время распознавания водителей групповых дорожных знаков (знаков), то есть DRT, упомянутого в этой статье.
3.3. Модель полиномиальной регрессии
В практических задачах на изменение зависимой переменной часто влияют несколько важных факторов. Необходимо использовать два или более влияющих фактора в качестве независимых переменных для объяснения изменения зависимой переменной, которое называется множественной регрессией [42]. Схематическая диаграмма модели полиномиальной регрессии показана на рисунке 5.
Чтобы исследовать корреляцию между DRT в DTSC, мы создали следующую модель: где — константа регрессии, — коэффициент регрессии, — DRT для OTS. (s), это DRT во время DTSC (s), это количество комбинаций знаков, это количество субъектов, и это остатки, обычно предполагаемые.
Матричное выражение находится где,,,.
3.3.1. Тест параметров модели
В предположении нормального распределения, если x является полным рангом, используйте результат оценки параметров модели регрессии методом наименьших квадратов по формулам (5) — (7): где — оценочное значение параметр.
Таким образом,
Оценка дисперсии случайной ошибки составляет
Подгонка теста степени совершенства осуществляется по формуле где — определяемый коэффициент, диапазон значений [0, 1], это общее изменение факторная переменная, пропорция изменения объясняется уравнением регрессии, чем ближе к 1, тем выше степень соответствия различных точек данных выборки, это сумма квадратов общих отклонений данных и сумма квадратов для регресса.
3.3.2. Тест значимости
Тест значимости уравнения регрессии предназначен для проверки значимости всего уравнения регрессии. Формула расчета статистики F: где — сумма квадратов остатков для данного значимого уровня; проверьте, что запрещенный домен есть.
Значимая проверка коэффициента регрессии — это где элементы на главной диагонали в для данного заметного уровня; проверьте, что запрещенный домен есть.
4. Результаты
4.1. Сбор данных
Схематическая диаграмма 15 групп результатов теста DRT показана на рисунке 6. Принципиальная диаграмма показывает, что всего получается 300 единиц достоверных данных. Среди них максимальное значение DRT составляет 3,14 с, минимальное значение — 0,55 с, а среднее значение — 1,64 с. Общие данные мало колеблются и относительно стабильны. Принципиальная схема данных испытаний представлена в таблице 2.
| ||||||||||||||||||||
Вообще говоря, DRT во время визуальных дорожных знаков находится в диапазоне от 0,50 до 2,00 с. Однако, поскольку в этом эксперименте в основном задействован DTSC, DRT следует соответственно увеличить. Согласно анализу тестовых данных, взаимосвязь между DRT и показателем точности в DTSC показана на рисунке 7.
Из рисунка 7 видно, что степень точности тестовых данных увеличивается с DRT.Кривизна больше за 2,8 с, и скорость роста ускоряется. За 2,8 с кривизна увеличивается, скорость ровная, а точность не сильно меняется. Поэтому для визуального распознавания больше подходит DRT в диапазоне от 0,55 до 2,80 с во время DTSC, а его точность составляет 98,3%.
Он использовал (1) — (2), чтобы сделать надежную оценку данных для получения средневзвешенного DRT. Статистический анализ данных показывает, что DRT в трех тестах не сильно меняется.Максимальные значения DRT для трех групп составляют 0,925 с, 0,986 с и 1,177 с. Минимальные значения составляют 2,087 с, 2,094 с и 2,323 с, а средние значения — 1,587 с, 1,557 с и 1,701 с. Средняя разница DRT составляет менее 0,15 с. Однако на тест влияет системная ошибка или человеческая ошибка, поэтому среднее значение DRT для TTSC меньше, чем для OTS. Но для сравнения было обнаружено, что средняя разница DRT составляет менее 0,05 с, и ее влияние невелико. Когда количество дорожных знаков увеличивается до трех, DRT значительно увеличивается.Принципиальная схема описательной статистики представлена на рисунке 8.
4.2. Анализ данных
Чтобы лучше понять взаимосвязь между DRT для DTSC, сделайте диаграмму рассеяния, как показано на рисунке 9. Она показывает линейную взаимосвязь между DRT для OTS, TTSC и TKTSC.
Следовательно, с помощью корреляционного анализа полезно измерить степень корреляции между переменными факторами. Принципиальная схема анализа релевантности показана на рисунке 10.Он показывает, что коэффициенты корреляции между DRT для OTS, DRT для TTSC и DRT для TKTSC равны 0,906 и 0,910 соответственно. И корреляция между этими тремя значима, когда уровень достоверности равен 0,01.
Экспериментальные данные анализируются методом полиномиальной регрессии. Это показывает, что выборка данных независима, коллинеарность отсутствует, а остатки соответствуют нормальному распределению. Схематическая диаграмма результатов соответствующих тестов коэффициентов показана в таблице 3, данные соответствуют, и уравнение регрессии находится где — DRT для OTS (ов), — это DRT для TTSC (ов), и — это DRT для TKTSC ( с).
| |||||||||||||||||||||||||||||||||||||||||
Следовательно, мы можем найти, что R 2 = 0.874, который показывает, что регрессионная модель хорошо подходит. Коэффициент значимости с 2 равен 0,008, а коэффициент значимости с 3 равен 0,006. Он показывает, что с 2 и с 3 могут существенно повлиять на с 1 . Поскольку коэффициент с 2 равен 0,464, а коэффициент с 3 равен 0,536, он отражает с 2 и с 3 может положительно повлиять на с 1 .То есть по мере увеличения количества дорожных знаков DRT значительно увеличивается. Принципиальная схема визуализации результатов представлена на рисунке 11.
4.3. Анализ других влияющих факторов
Во время визуального распознавания многие факторы влияют на DRT к дорожным знакам. Поэтому далее анализируются другие влияющие факторы, влияющие на DRT. Статистическое описание факторов приведено в таблице 4. В таблице MDRT — это среднее значение DRT в 15 группах.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Благодаря корреляционному анализу экспериментальных данных, экспериментальные данные подробно исследуются. Он показывает, что коэффициенты корреляции между полом, возрастом, стажем вождения и MDRT составляют -0,154, -0,309 и -0,120. Это показывает, что связь между полом, возрастом, стажем вождения и MDRT не имеет значения. Принципиальная схема анализа релевантности показана на рисунке 12.(1) На рисунке 12 тестовые данные TTSC показывают, что коэффициент корреляции между DRT и полом составляет -0,445. Когда уровень достоверности составляет 0,05, корреляция между ними значима. Тест показывает, что среднее значение DRT для мальчиков составляет 1,598 с, а для девочек — 1,177 с. Среднее значение DRT у мальчиков немного больше, чем у девочек, что свидетельствует о том, что девочки могут распознавать дорожные знаки быстрее, чем мальчики. (2) Кроме того, с экспериментальными данными TKTSC коэффициент корреляции между DRT и возрастом составляет -0.484. Когда уровень достоверности равен 0,05, корреляция между ними значима. В то же время существует определенная отрицательная корреляция между возрастом и ДРТ. С возрастом DRT постепенно уменьшается, и дорожные знаки будут видны быстрее. (3) Связь между стажем вождения и DRT не имеет значения. Из рисунка 12 видно, что коэффициент корреляции между возрастом и стажем вождения составляет 0,861. Когда уровень достоверности составляет 0,01, корреляция между ними значима.Есть определенная положительная корреляция. С возрастом увеличивается и опыт вождения, отражая, что опыт вождения также может влиять на видимость водителя. С возрастом стаж вождения увеличивается, а DRT снижается. То есть опытные водители распознают дорожные знаки быстрее, чем водители-новички.
5. Заключение
В этой статье DRT тестируется и анализируется методом моделирования с помощью DTSC на городской дороге.Корреляционный анализ используется для изучения взаимосвязи между DRT во время DTSC. Обсуждаются другие факторы, влияющие на DRT. Анализируя экспериментальные данные, можно сделать следующие выводы.
Вообще говоря, DRT во время визуальных дорожных знаков находится в диапазоне от 0,50 до 2,00 с. Однако здесь задействован DTSC, и DRT следует соответствующим образом увеличить. Согласно анализу данных испытаний, DRT находится в диапазоне от 0,55 до 2,80 с во время DTSC, а его точность составляет 98.3%.
Количество DTSC будет иметь определенное влияние на DRT, и корреляция между OTS и TSC значительна. То есть по мере увеличения количества дорожных знаков DRT будет увеличиваться. Экспериментальные данные показывают, что нет значимой связи между полом, возрастом, стажем вождения и MDRT. При определенных условиях пол, возраст и опыт вождения влияют на DRT во время DTSC, анализируя исходные результаты теста, а это означает, что у мальчиков время отклика немного выше, чем у девочек.С возрастом и стажем вождения DRT уменьшается. Опытные водители реагируют быстрее, чем водители-новички.
В статье использовались эксперименты по моделированию помещений для изучения времени распознавания водителем различных сочетаний знаков. Результаты могут улучшить фактическую работу дорожного движения и снизить риск аварий, вызванных проблемами с дорожными знаками, что может сделать дороги более открытыми. В то же время они обеспечивают соответствующую теоретическую основу для установки городских дорожных знаков, служат мощным справочным материалом для пересмотра различных стандартов и норм, устанавливающих дорожные знаки, и предоставляют идеи для будущих исследований системы знаков.Но из-за того, что в этом эксперименте используется метод тестирования симуляции вождения, на него влияют размер выборки, человеческая ошибка и другие факторы, влияющие на результаты анализа. Однако он выполняет расчет средневзвешенного значения, чтобы уменьшить разницу. Но на распознавание DRT влияют различные факторы, такие как индивидуальные различия, физиологические и психологические факторы, объем информации, режим настройки и другие факторы. Они повлияют на визуальное распознавание водителя. Последующие действия требуют дальнейшего изучения.
Доступность данных
Данные, использованные для подтверждения выводов этого исследования, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Материалы авторов
K.L. и H.D. концептуализировал исследование; К.Л. и H.D. разработала методологию; К.Л. предоставил программное обеспечение; H.D. проведена валидация; К.Л. выполнен формальный анализ; курирование данных было проведено К.L. и H.D .; оригинальный черновик — как и написано К.Л .; К.Л. и H.D. просмотрел и отредактировал статью. Все авторы прочитали и согласились с опубликованной версией рукописи.
Благодарности
Это исследование было поддержано Фондом фундаментальных исследований для центральных университетов Китая (№ 2572017AB27) и Национальным фондом естественных наук Китая (№ 71771047).
WeWork пересчитает результаты из-за ошибки классификации со своим эквайером SPAC
WeWork Inc.в заявке на ценные бумаги сообщила, что будет пересчитывать свои результаты за несколько кварталов, включая последний, и что руководство пришло к выводу, что в его внутреннем контроле имелись существенные недостатки.
Компания по совместному использованию офисов, которая стала публичной в октябре в результате объединения с BowX Acquisition Corp., специализированной компанией по приобретению, заявила в среду, что восстановление связано с бухгалтерской классификацией обыкновенных акций, выпущенных в рамках первичного публичного размещения BowX.
Он классифицировал часть этих акций как постоянный капитал. Учитывая, что акции имели «определенные особенности выкупа, которые не находились исключительно под контролем компании», их следовало классифицировать как временный капитал.
Учитывая ошибку классификации, «имелась существенная слабость во внутреннем контроле над финансовой отчетностью, касающейся интерпретации и учета некоторых сложных характеристик публичных акций», — говорится в заявлении компании о ценных бумагах.
По результатам исследования компания планирует пересмотреть финансовую отчетность за 2020 год и первые три квартала 2021 года.
Компания заявила в заявлении в среду, что планы пересмотра не связаны с ее текущими операциями.
«Существенная слабость, о которой говорится в сегодняшней документации, существует в BowX и не распространяется на WeWork», — заявили в компании.
Акции WeWork упали на 5,2% после закрытия торгов.
Этот рассказ был опубликован из ленты телеграфного агентства без изменений текста
Подпишитесь на информационный бюллетень монетного двора
* Введите действующий адрес электронной почты
* Спасибо за подписку на нашу рассылку.
Не пропустите ни одной истории! Оставайтесь на связи и в курсе с Mint. Скачать наше приложение сейчас !!
Лечение термитов без палатки | Hulett Pest Control
Что такое термиты?
Термиты — это маленькие насекомые-деревоеды, которые работают вместе в сложных колониях.Есть рабочие термитов, солдатских термитов, летающих роевиков, и в каждой колонии есть королева и король. Пока королева а также Королевские термиты позволяют колонии быстро расти, что приводит к заражениям, рабочие термиты создают идеальные условия проживания, необходимые для процветания группы. Они несут еду обратно к остальным колония, обеспечивая ее хорошее снабжение. Солдаты-термиты следят за тем, чтобы колония оставалась защищенной из хищники, например, муравьи.Но не волнуйтесь, эти солдаты не могут остановить Хьюлетта.
Термиты из сухого дерева любят строить дом из сухого дерева, как следует из их названия. Из-за характера их среды обитания, вы можете не заметить, что вам нужно лечение термитов в течение довольно долгого времени после того, как они установят колония В вашем доме. Вы часто можете встретить термитов из сухого дерева на чердаке или на крыше вашего дома, в стенах, в оконные и дверные коробки и другие деревянные конструкции.Они даже могут питаться деревянной мебелью, половицы и многое другое.
Признаки заражения термитами
Как только вы заметите признаки заражения термитами, вам необходимо связаться с Hulett Environmental. Услуги сразу. Поскольку термиты могут довольно долго прятаться, не делая себя очевидно, по когда вы узнаете предупреждающие знаки, вполне вероятно, что они уже начали повреждать ваш дом.
Признаки того, что в вашем доме есть термиты
- Шум может исходить изнутри ваших стен — часто это звук щелчка или тихого жевания. Хотя Драйвуд Термиты обычно скрыты и обособлены.
- Стаи летающих термитов. Особенно часто после дождя появляются термиты из сухого дерева. Ты мая также найдите крылья термитов вокруг своего дома и на чердаке, так как насекомые сбрасывают их после того, как находят приятель воспроизвести.
- Насекомые, похожие на крылатых муравьев. Термитов часто принимают за муравьев, поскольку они тем же размер и форма. Но у термитов прямые антенны и прямая талия, а у муравьев — локоть антенна и защемленное брюшко.
- Деревянные конструкции, которые звучат как полые, термиты поедают древесину от центра к центру.Они могут оставить тонкими полоски из дерева на внешней стороне доски или доски, но удалите все, что находится внутри. Ваш деревянный конструкции могут по-прежнему казаться твердыми, но требуют лечения от термитов, поскольку они имеют повреждения внутри.
- Деформированные двери, окна, плинтусы и т. Д. По мере того, как термиты пробираются сквозь дерево, они могут начать провисать и сдвиг.
- Крошечные дырочки в дереве внутри или снаружи дома. Это признак того, что термиты роющий их путь через пищу и гнездо. Термиты используют эти «выбивные отверстия», чтобы изгнать свои фекалии. материал чтобы освободить место для их растущей колонии.
- Termite Frass, или кал.Как и другие насекомые, термиты оставляют после себя след фекалий. Drywood термиты изгоняют свои фекалии за пределы своих гнезд. Frass может выглядеть как перец или кофе. основания.
Если вы заметили какой-либо из этих признаков, пора изучить фумигацию термитов сухого дерева или альтернативы, такой как лечение «без палатки».
.