Статор — это… Что такое Статор?
СТАТОР — (англ. stator от лат. sto стою), неподвижная часть электрической машины, выполняющая функции магнитопровода и несущей конструкции. Термин статор употребляют преимущественно по отношению к машинам переменного тока. Статор состоит из сердечника (с… … Большой Энциклопедический словарь
Статор — электродвигателя 3 x фазного переменного тока Статор (англ. stator, от лат … Википедия
СТАТОР — СТАТОР, статора, муж. (латин stator, букв. тот, кто стоит) (тех.). Неподвижная часть электрических машин, в противоп. ротору. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
СТАТОР — СТАТОР, а, муж. (спец.). Неподвижная часть электрической машины роторного типа. | прил. статорный, ая, ое. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
СТАТОР — (Stator) неподвижная часть электрической машины.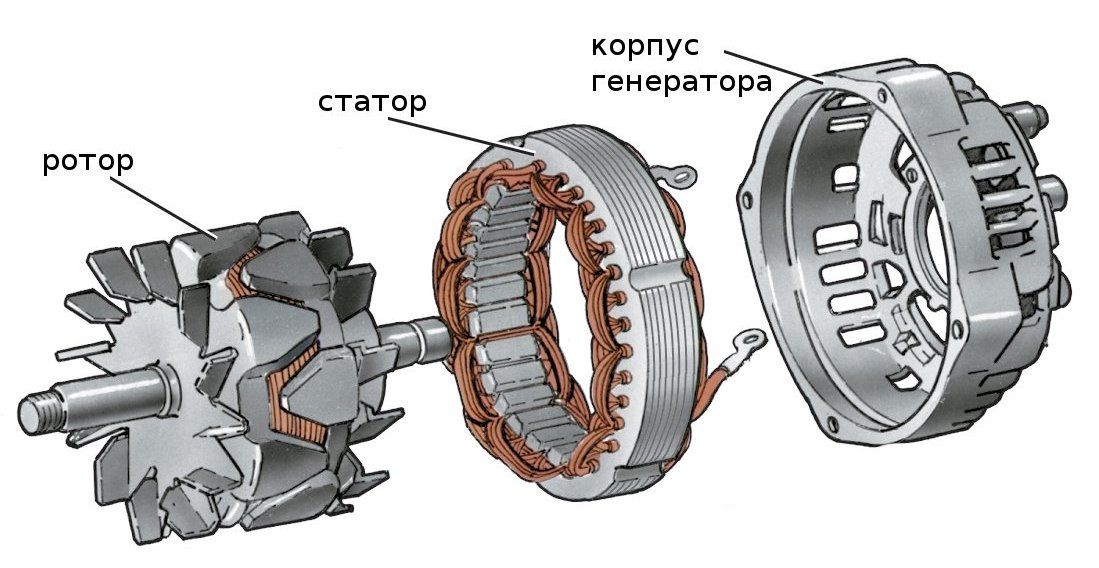
СТАТОР — неподвижная часть электр. машин. Термин этот применяется гл. обр. к машинам переменного тока. Технический железнодорожный словарь. М.: Государственное транспортное железнодорожное издательство. Н. Н. Васильев, О. Н. Исаакян, Н. О. Рогинский, Я. Б … Технический железнодорожный словарь
статор — сущ., кол во синонимов: 1 • статер (1) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
статор — статор, мн. статоры, род. статоров и в просторечии статора, статоров … Словарь трудностей произношения и ударения в современном русском языке
Статор — Сталин торжествует имя … Словарь сокращений и аббревиатур
СТАТОР — (1) неподвижная часть электрической машины, выполняющая функции магнитопровода и несущей конструкции; (2) неподвижная часть машины или узла роторного типа, напр. С. компрессора, турбины и т. п … Большая политехническая энциклопедия
С. компрессора, турбины и т. п … Большая политехническая энциклопедия
статор — а; м. [от лат. stator стоящий неподвижно] Неподвижная (невращающаяся) часть электрических машин (генератора, двигателя и т.п.), состоящая из сердечника и станины. ◁ Статорный, ая, ое. С ое кольцо турбины. С ая обмотка. * * * статор (англ. stator … Энциклопедический словарь
Электродвигатели
Электрические двигатели обычно состоят из двух частей. Первая – стационарная, или статор. Вторая – подвижная, или ротор, которая вращается внутри статора. В статоре находятся многочисленные обмотки. Проходящий по обмоткам электрический ток создает концентрированное магнитное поле, которое вращает ротор, в результате чего возникает механическая энергия.
Чем более мощный двигатель, тем больше статор, и тем крупнее бороздки с мотками проволоки.
Первый шаг в производстве электрических двигателей – покрытие изоляцией бороздок, что обеспечивает поддержание напряжения на выводах мотков проволоки. Мотки состоят из множества витков медной проволоки, намотанных на станке с компьютерным управлением. Чем мощнее двигатель, тем больше витков в мотке.
Мотки состоят из множества витков медной проволоки, намотанных на станке с компьютерным управлением. Чем мощнее двигатель, тем больше витков в мотке.
Рабочие скрепляют витки проволоки на мотках для того, чтобы проволока не расходилась во время операции по установке мотков в бороздки статора. Каждый моток накрывается изоляцией из стекловолокна. Затем стекловолокном изолируется часть мотков, оставшихся за пределами бороздок. Далее, вставляются клинья из стекловолокна, чтобы заблокировать мотки в бороздках.
Когда все мотки вставлены и изолированы, рабочие начинают подготовку к сборке двигателя. Они надевают акриловые изоляционные трубки на оба конца мотка с проволокой, который имеет два вывода. Далее, изолированные провода собираются в силовые кабели. Количество проводов в силовом кабеле сильно варьируется в зависимости от напряжения данного типа оборудования.
Рабочие спаивают провода мотков и изолируют их, затем провода укладываются внутри статора и выводятся таким образом, чтобы они были доступны для последующего соединения к источнику энергии, когда двигатель будет установлен. Теперь с помощью термостойкого полиэфирного корда рабочие плотно связывают мотки для того, чтобы они не смещались во время работы двигателя. Этот узел связанных между собой мотков проволоки называется статором. Теперь рабочие погружают статор в емкость с лаком на основе полиэфира, что делает статор водонепроницаемым. Далее, статор помещают в печь при температуре 135-150 градусов Цельсия. Лак затвердевает и придает жесткость моткам проволоки в статоре.
Теперь с помощью термостойкого полиэфирного корда рабочие плотно связывают мотки для того, чтобы они не смещались во время работы двигателя. Этот узел связанных между собой мотков проволоки называется статором. Теперь рабочие погружают статор в емкость с лаком на основе полиэфира, что делает статор водонепроницаемым. Далее, статор помещают в печь при температуре 135-150 градусов Цельсия. Лак затвердевает и придает жесткость моткам проволоки в статоре.
Следующий этап – балансировка ротора. Это очень важный этап, потому что, если ротор не сбалансирован, двигатель будет вибрировать, что недопустимо. Ротор балансируется так же, как колеса автомобиля. Только точность такой балансировки в несколько раз выше.
Ротор вставляется в статор. Эта операция выполняется с предельной осторожностью, чтобы не повредить статор. Ротор будет вращаться на стальных подшипниках, которые нагревают, чтобы произошло их расширение, тем самым установка облегчается.
Затем подшипники охлаждаются струей воздуха, и проверяется плотность их посадки на ротор.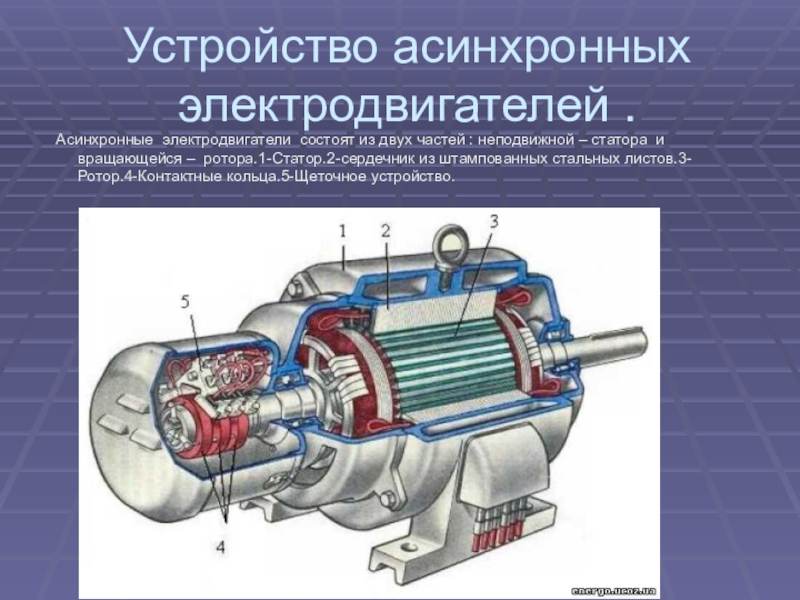 Такой же процесс происходит с задней стенкой двигателя.
Такой же процесс происходит с задней стенкой двигателя.
66603-17: Системы измерения воздушного зазора ротор-статор
Назначение
Системы измерения воздушного зазора ротор-статор (далее — система) предназначены для измерения воздушного зазора между статором, на котором закреплен датчик, и ротором в генераторах переменного тока.
Описание
Принцип действия системы основан на преобразовании сигнала переменного напряжения, поступающего с датчика воздушного зазора, в напряжение постоянного тока, пропорциональное расстоянию между статором и ротором генератора.
Датчик воздушного зазора AGS-240 (далее AGS-240) представляет собой развернутый плоский конденсатор и состоит из двух обкладок, экранированных со стороны задней поверхности датчика. На одну обкладку (передающую) при помощи кабеля подается сигнал возбуждения с генератора в виде синусоидального напряжения. В результате чего возникает электрическое поле, которое изменяется при изменении расстояния между основанием, на котором закреплен датчик (статор), и объектом, до которого измеряется расстояние (полюс ротора). Модулированный сигнал на выходе приемной обкладки пропорционален расстоянию между статором и ротором генератора. Блок преобразователя сигналов SPA-01 предназначен для формирования синусоидального переменного напряжения, подаваемого на датчик, и приема сигнала с приемной обкладки датчика для дальнейшего его преобразования в сигнал постоянного тока.
Постоянный ток на выходе преобразователя меняется от 4,0 мА при минимальном зазоре
6 мм до 20 мА при максимальном зазоре 30 мм.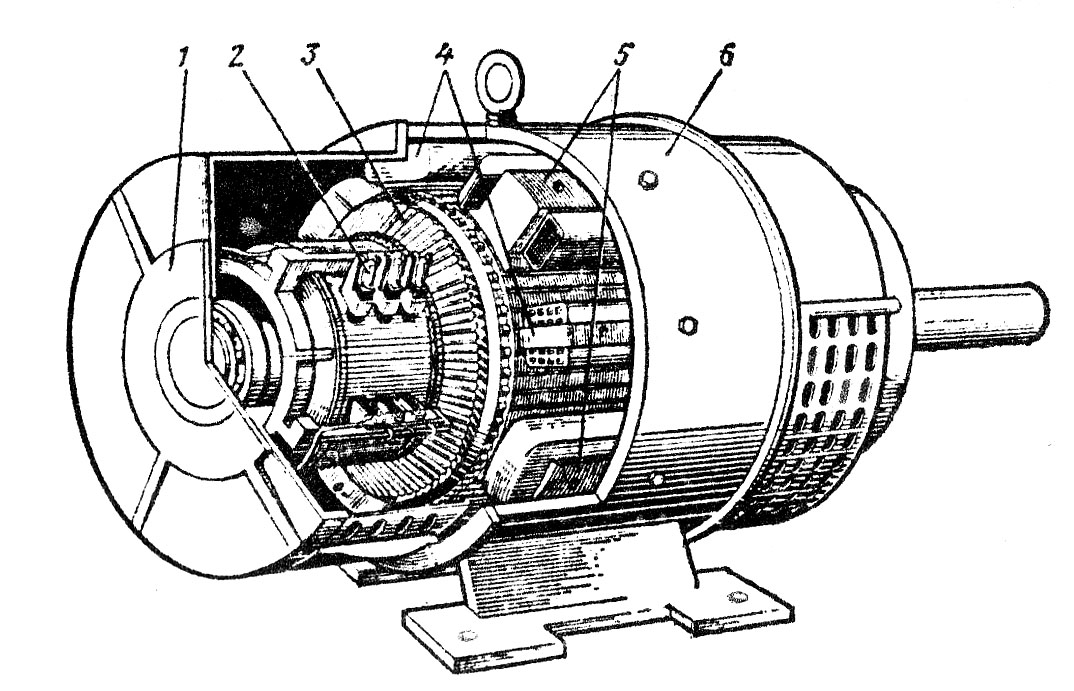 Далее сигнал постоянного тока поступает на промышленный компьютер, а затем передается через сервер на автоматизированное рабочее место оператора для контроля за техническим состоянием гидрогенератора в режиме реального времени.
Далее сигнал постоянного тока поступает на промышленный компьютер, а затем передается через сервер на автоматизированное рабочее место оператора для контроля за техническим состоянием гидрогенератора в режиме реального времени.
Конструктивно система состоит из бесконтактного емкостного датчика воздушного зазора AGS-240, соединенного двухжильным экранированным кабелем с блоком преобразователя сигналов SPA-01 (далее SPA-01). AGS-240 представляет собой конструкцию неразборного типа. Электронные элементы SPA-01 размещены в металлическом корпусе промышленного типа, который располагается в непосредственной близости от объекта контроля.
Общий вид датчика воздушного зазора AGS-240 представлен на рисунке 1. Общий вид блока преобразователя сигналов SPA-01 с указанием места пломбировки голографической наклейкой от несанкционированного доступа и обозначение места нанесения знака поверки представлены на рисунке 2.
Программное обеспечение
отсутствует.
Таблица 1 — Метрологические характеристики
|
Наименование характеристики |
Значение |
|
Диапазон измерений воздушного зазора, мм |
от 6 до 30 |
|
Пределы допускаемой основной относительной погрешности измерения зазора, % |
±5,0 |
|
Номинальное значение коэффициента преобразования по току, мА/мм |
0,667 |
|
Пределы допускаемого относительного отклонения действительного значения коэффициента преобразования от номинального значения, % |
±5,0 |
|
Нелинейность амплитудной характеристики в диапазоне измерений зазора, % не более |
±5,0 |
|
Пределы допускаемой дополнительной относительной погрешности измерений зазора при воздействии на датчик и блок преобразователя сигналов максимальных значений повышенной и пониженной рабочей температуры среды при максимальной повышенной относительной влажности воздуха, % |
±5 |
|
Диапазон измерений постоянного тока на выходе системы, мА |
от 4 до 20 |
|
Частота выходного сигнала генератора, кГц |
от 195 до 205 |
Таблица 2 — Основные технические характеристики
|
Наименование характеристики |
Значение |
|
Параметры электрического питания: напряжение питания постоянного тока, В |
04+2,4 3,6 |
|
Потребляемая мощность, В-А, не более |
2,0 |
|
Г абаритные размеры датчика воздушного зазора AGS-240, мм, не более: высота ширина длина |
3 40 240 |
|
Габаритные размеры блока преобразователя сигналов SPA-01, мм, не более: высота ширина длина |
32 75 145 |
|
Масса датчика воздушного зазора AGS-240 без кабеля, кг, не более |
0,065 |
|
Масса блока преобразователя сигналов SPA-01, кг, не более |
0,240 |
|
Условия эксплуатации: температура окружающей среды, °С: для датчика воздушного зазора AGS-240 для блока преобразователя сигналов SPA-01 относительная влажность при температуре 35,0 °С. |
от -15 до +125 от 0 до +55 до 98 |
|
Средний срок службы, лет Средняя наработка на отказ, ч |
10 25000 |
 %
%Знак утверждения типа
наносится на лицевой панели блока преобразователя сигналов SPA-01 методом металлопластики и на титульные листы руководства по эксплуатации и паспорта типографским способом.
Таблица 3 — Комплектность средства измерений
|
Наименование |
Обозначение |
Количество |
|
Датчик воздушного зазора |
AGS-240 |
1 шт. |
|
Блок преобразователя сигналов |
SPA-01 |
1 шт. |
|
Кабель |
— |
1 шт. |
|
Руководство по эксплуатации |
ПРГА.000509.00 РЭ |
1 экз. |
|
Паспорт |
ПРГА.000509.00 ПС |
1 экз. |

Поверка
осуществляется по документу ПРГА. 000509.00 РЭ «Система измерения воздушного зазора ротор-статор. Руководство по эксплуатации», Приложение А «Методика поверки», утвержденному ФГУП «ВНИИМ им Д.И. Менделеева» 26 января 2016 года.
Основные средства поверки:
— штангенциркуль ШЦЦ, рег. №52058-12, пределы измерений 0,0 — 150,0 мм;
— осциллограф цифровой TDS1002B, рег. №32618-06, полоса 60,0 МГц, дискретизация 1,0 ГГц/канал в реальном времени, развертка по вертикали 2,0 мВ -5,0 В/дел., по горизонтали
5 нс — 50,0 с/дел;
— мультиметр Fluke 17B+, рег. №59778-15, диапазон измерений СКЗ напряжения от 1 мВ до 1000 В, тока от 400 мкА до 10 А, погрешность измерений постоянного тока ±1,0 %.
Допускается применение аналогичных средств поверки, обеспечивающих определение метрологических характеристик поверяемых СИ с требуемой точностью.
Знак поверки наносится в раздел «ПОВЕРКА» паспорта и на лицевую панель блока преобразователя сигналов SPA-01.
Сведения о методах измерений
приведены в эксплуатационном документе.
Нормативные документы
ГОСТ 22261-94 «Средства измерений электрических и магнитных величин. Общие технические условия».
Технические условия «Системы измерения воздушного зазора ротор-статор ПРГА. 000509.00 ТУ».
Устройство электродвигателя постоянного тока
Электрический двигатель – это электрическая машина, предназначенная для преобразования электрической энергии, поступающей от источника тока в механическую энергию. Часть потребляемой электроэнергии расходуется на перемагничивание ферромагнетиков, преодоление электрического сопротивления и силы трения, что сопровождается образованием тепла.
Электродвигатель, работающий от источника постоянного тока, называют двигателем постоянного тока.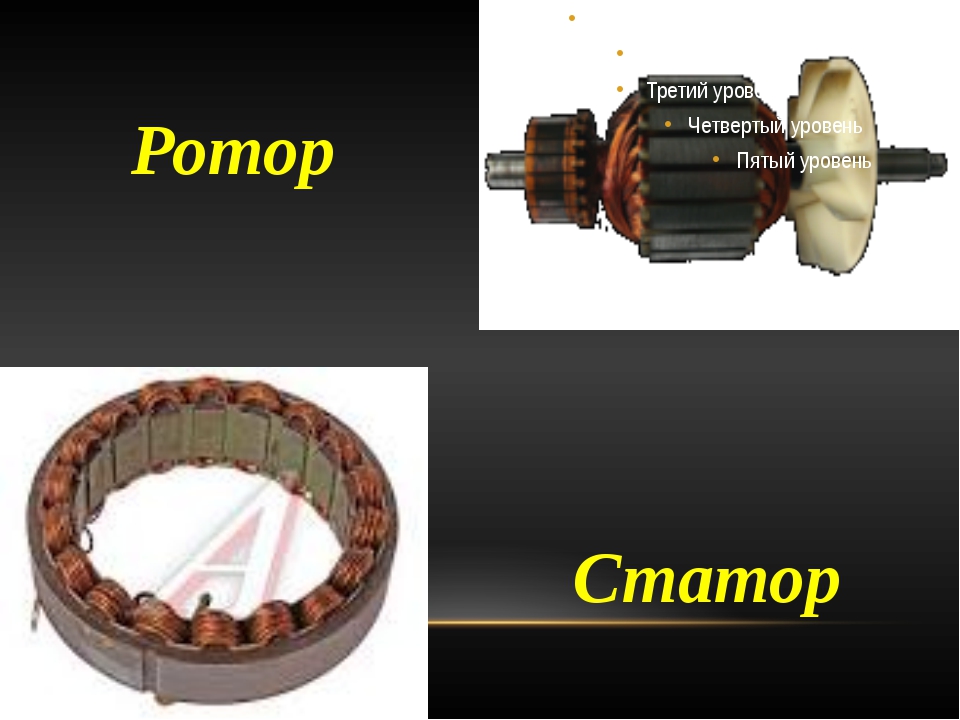 В зависимости от особенностей конструкции электрические двигатели постоянного тока подразделяются на коллекторные и бесколлекторные. Рассмотрим устройство двигателя постоянного тока на примере изделия коллекторной конструкции. Основные элементы электродвигателя постоянного тока: статор, ротор, коллектор и токопроводящие щетки.
В зависимости от особенностей конструкции электрические двигатели постоянного тока подразделяются на коллекторные и бесколлекторные. Рассмотрим устройство двигателя постоянного тока на примере изделия коллекторной конструкции. Основные элементы электродвигателя постоянного тока: статор, ротор, коллектор и токопроводящие щетки.
Статор, он же индуктор, – неподвижная часть машины, в большинстве вариантов исполнения – внешняя. Статор состоит из станины и магнитных полюсов. В зависимости от конструкции двигателя на статоре могут устанавливаться постоянные магниты, электромагниты с обмотками возбуждения или короткозамкнутые обмотки. Кроме основных магнитных полюсов на статоре могут устанавливаться дополнительные полюса. Статор необходим для создания магнитного потока в системе.
Подвижная вращающаяся часть машины, как правило, внутренняя – ротор или якорь. Ротор электродвигателя постоянного тока состоит из многочисленных катушек с токопроводящими обмотками, по которым проходит электрический ток. Количество катушек в конструкции ротора может достигать нескольких десятков. Таким образом частично устраняется неравномерность крутящего момента, уменьшается коммутируемый ток, обеспечивается оптимальное взаимодействие магнитных полей статора и ротора.
Количество катушек в конструкции ротора может достигать нескольких десятков. Таким образом частично устраняется неравномерность крутящего момента, уменьшается коммутируемый ток, обеспечивается оптимальное взаимодействие магнитных полей статора и ротора.
Щеточно-коллекторный узел представляет собой связующее звено между ротором и статором. В коллекторе объединены выводы всех катушек ротора. Этот узел служит переключателем тока со скользящими контактами и дополнительно выполняет функции датчика углового положения ротора.
Щетки – неподвижные контакты, подводящие ток к ротору. Чаще всего в двигателях применяются медно-графитовые и графитовые щетки. При вращении ротора происходит замыкание и размыкание контактов коллектора. При этом в обмотках ротора происходят переходные процессы, приводящие к искрению. Искрение и трение при работе двигателя постоянного тока приводят к тому, что щеточно-коллекторный узел является самым уязвимым элементом конструкции. Для уменьшения искрения чаще всего используется установка дополнительных полюсов. Порядка 25% поломок электродвигателей происходит по причине неисправности щеточно-коллекторного узла. В некоторых областях применения электродвигателей постоянного тока поломки по причине износа щеточно-коллекторного узла составляют свыше 60% от общего количества.
Порядка 25% поломок электродвигателей происходит по причине неисправности щеточно-коллекторного узла. В некоторых областях применения электродвигателей постоянного тока поломки по причине износа щеточно-коллекторного узла составляют свыше 60% от общего количества.
При подаче тока на ротор, помещенный в магнитное поле статора, в системе возникает момент силы, под действием которого ротор начинает вращаться. Направление вращения ротора зависит от направления тока. Чтобы ротор вращался в одном и том же направлении, направление тока в нем должно оставаться постоянным. Это условие выполняется с помощью коллекторного узла. Механическая энергия вращения ротора передается другим механизмам посредством присоединенного к ротору шкива и ременной передачи.
Анализ индукционного двигателя: Верификационная задача TEAM
В этой заметке мы рассмотрим задачу моделирования трёхфазного асинхронного двигателя, описанную как проблема №30a в Testing Electromagnetic Analysis Methods (TEAM) (от общества Compumag).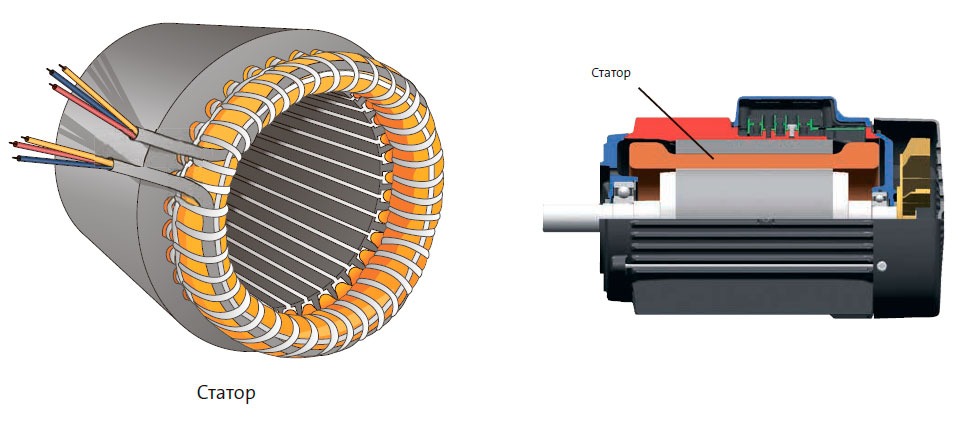 Мы покажем, как моделировать асинхронный двигатель в 2D с использованием физического интерфейса Rotating Machinery, Magnetic (Магнитные вращающиеся механизмы) и решателя во временной области. Изучим динамику пуска двигателя, объединив электромагнитный расчёт с динамикой ротора, учитывая при этом инерционные эффекты. В конце мы сравним результаты моделирования в COMSOL Multiphysics с верификационными данными.
Мы покажем, как моделировать асинхронный двигатель в 2D с использованием физического интерфейса Rotating Machinery, Magnetic (Магнитные вращающиеся механизмы) и решателя во временной области. Изучим динамику пуска двигателя, объединив электромагнитный расчёт с динамикой ротора, учитывая при этом инерционные эффекты. В конце мы сравним результаты моделирования в COMSOL Multiphysics с верификационными данными.
Проектирование асинхронного двигателя посредством моделирования
Трёхфазный асинхронный двигатель состоит из двух главных частей: неподвижной, называемой статором, и вращающейся, называемой ротором. Статор состоит из набора пластин электротехнической стали и трёхфазных обмоток, а ротор — из алюминия и стали. Трёхфазные обмотки, обозначенные A, B и C на рисунке ниже, в статоре смещены друг относительно друга на 120°. Каждая фаза обмотки охватывает 45° полного оборота. Обмотки разделяются воздушным зазором. Внешний диаметр статора — 5.7 см.
Конструкция трёхфазного асинхронного двигателя. Показаны основные части, размеры и конфигурации фаз.
Показаны основные части, размеры и конфигурации фаз.
По условиям задачи задаём плотность тока, равною 310 A/см2, что эквивалентно действующему значению тока Irms = 2045.175 на каждую обмотку. Двигатель работает на частоте 60 Гц. Магнитная проницаемость стали статора и ротора одинаковая — μr = 30. Электрическая проводимость стали статора — σ = 0 (шихтовка), ротора — σ = 1.6e6 См/м. Электрическая проводимость алюминиевой части ротора — σ = 3.72e7 См/м.
Моделирование динамики асинхронного двигателя в COMSOL Multiphysics
При построении геометрии асинхронного двигателя в COMSOL Multiphysics, необходимо создать два объединения (unions). Одно для элементов статора, второе для элементов ротора. Заключительным этапом создания геометрии является Построение сборки (Form Assembly), как описано в этом видео. Таким образом, между статором и ротором автоматически сгенерируются тождественные пары (identity pair). 3]
3]
Для моделирования электромагнитных полей в трёхфазном асинхронном двигателе будем использовать физический интерфейс Rotating Machinery, Magnetic. Так как все магнитные и электрические свойства материалов линейны, добавленный по умолчанию узел Ampère’s Law (Закон Ампера) оставляем без изменений.
Для моделирования трёзфазных обмоток будем использовать условие Homogenized Multi-turn Coil (Однородная многовитковая катушка). Число витков в обмотке равно n0 = 2045. Каждый многожильный провод проводит ток порядка 1[A], который смещён на 120° между фазами. Запишем выражения для каждой из фаз:
I A = 1[A]*cos(w0*t)*sqrt(2)I B = 1[A]*cos(w0*t+120[deg])*sqrt(2)I C = 1[A]*cos(w0*t-120[deg])*sqrt(2)
Где, 1[A] — действующее значение тока. Чтобы получить амплитудное, умножаем на
Чтобы получить амплитудное, умножаем на sqrt(2).
В физическом интерфейсе Rotating Machinery, Magnetic с помощью узла Force Calculation (Расчёт Силы) можно сразу рассчитать электромагнитный момент, действующий на ротор. Добавив этот узел, при постобработке нам будут доступны пространственные компоненты магнитных сил (rmm.Forcex_0, rmm.Forcey_0, rmm.Forcez_0) и осевого момента инерции ( rmm.Tax_0). Узел Force Calculation для расчёта силы просто интегрирует тензор напряжений электромагнитного поля (максвелловский тензор напряжений) по всей внешней выбранной границе или области. Так как метод основан на интегрировании поверхности, рассчитываемая сила зависит от размера сетки. При использовании этого метода для точного вычисления силы или момента важно всегда выполнять исследование по сеточной сходимости (mesh refinement study).
Есть другой способ расчёта момента — метод Арккио. Он заключается в объёмном интегрировании вектора плотности магнитного потока. В этом методе электромагнитный момент электрических вращающихся машин в 2D моделях может быть рассчитан из следующего уравнения.
В этом методе электромагнитный момент электрических вращающихся машин в 2D моделях может быть рассчитан из следующего уравнения.
T_e = \frac{1}{\mu_0(r_o-r_i)}\int\limits_{S_{ag}}rB_rB_\phi dS
Где r_o — это внешний радиус, r_i — внутренний радиус, S_{ag} — площадь поперечного сечения воздушного зазора. B_r и B_\phi — плотность магнитного потока в радиальном и азимутальном направлении, соответственно. Далее на скриншотах более подробно показано, как добавить расчёт по методу Арккио в модель в COMSOL Multiphysics.
Реализация метода Арккио для расчёта момента в асинхронном двигателе.
Моделирование динамики пуска двигателя с использованием физического интерфейса
Global ODEs and DAEsВращательное движение ротора задаётся следующими двумя уравнениями:
(1)
\frac{d \omega_m}{dt}=\frac{T_m-T_L}{I}
(2)
\frac{d \phi}{dt}=\omega_m
где T_m — аксиальный электромагнитный момент ротора, T_L — момент на нагрузке, \omega_m — угловая скорость ротора, \phi — угловое положение ротора.
Эти уравнения задаются в двух разных узлах Global Equations в физическом интерфейсе Global ODE and DAEs (Глобальные ОДУ и ЛАУ), как показано на рисунке ниже.
Задание дифференциальных уравнений для угловой скорости и углового положения ротора в физическом интерфейсе Global ODEs and DAEs.
График изменения электромагнитного момента ротора в зависимости от времени (слева). Угловая скорость ротора (справа).
График электромагнитного момента в начале колеблется, а затем достигает максимального значения при 0,28 секунды. Затем уменьшается до нуля при достижении синхронной скорости при 0,4 секунды. При 0,5 секунды момент в нагрузке изменяется скачком (по заданному закону). Затем постепенно двигатель выходит на номинальный режим.
Сравнение результатов моделирования в COMSOL Multiphysics и результатов верификационной задачи TEAM
Чтобы сравнить электромагнитный момент, наводимое напряжение и потери в роторе с верификационной задачей TEAM №30a, мы создали такую же модель асинхронного двигателя в COMSOL Multiphysics в частотной области с использованием физического интерфейса Magnetic Fields (Магнитные поля). В данном интерфейсе вращательное движение задаётся узлом Lorentz term (сила Лоренца), который описывает движение. Вы можете скачать учебный пример трёхфазного асинхронного двигателя здесь.
В данном интерфейсе вращательное движение задаётся узлом Lorentz term (сила Лоренца), который описывает движение. Вы можете скачать учебный пример трёхфазного асинхронного двигателя здесь.
Сравнение графиков зависимости аксиального момента от скорости двигателя (слева) и наводимого напряжения от скорости двигателя (справа).
Сравнение графиков зависимости потерь в роторе от скорости двигателя (слева) и потерь в стали от скорости двигателя (справа).
Дополнительные ресурсы по моделирования двигателей в COMSOL Multiphysics
- Начните моделировать асинхронные двигатели, ознакомившись со следующими учебными примерами:
- Чтобы узнать больше о моделировании вращающихся машин, прочтите следующие статьи:
- Следите за нашим блогом по проектированию Электромагнитных устройств
Генератор переменного тока — Генератор переменного тока состоит он из неподвижной части, которая называется статор или якорь и вращающейся части — ротор или индуктор
В 1832-м году неизвестным изобретателем был создан первый однофазный синхронный многополюсный генератор переменного тока. Но в самых первых электронных устройствах применялся только постоянный ток, в то время как переменный ток долгое время не мог найти своего практического применения. Тем не менее, вскоре выяснили, что намного практичнее использовать не постоянный, а переменный ток, то есть тот ток, который периодически меняет свое значение и направление. Преимущества переменного тока, состоят в том, что его удобнее вырабатывать при помощи электростанций, генераторы переменного тока экономичнее и проще в обслуживании, чем аналоги, работающие на постоянном токе. Поэтому были собраны надежные электрические двигатели переменного тока, которые сразу нашли свое широкое применение в промышленных и бытовых сферах. Надо отметить, что благодаря существованию переменного тока, его особенным физическим явлениям, смогли появиться такие изобретения, как радио, магнитофон и прочая автоматика и электротехника, без которой сложно представить современную жизнь.
Но в самых первых электронных устройствах применялся только постоянный ток, в то время как переменный ток долгое время не мог найти своего практического применения. Тем не менее, вскоре выяснили, что намного практичнее использовать не постоянный, а переменный ток, то есть тот ток, который периодически меняет свое значение и направление. Преимущества переменного тока, состоят в том, что его удобнее вырабатывать при помощи электростанций, генераторы переменного тока экономичнее и проще в обслуживании, чем аналоги, работающие на постоянном токе. Поэтому были собраны надежные электрические двигатели переменного тока, которые сразу нашли свое широкое применение в промышленных и бытовых сферах. Надо отметить, что благодаря существованию переменного тока, его особенным физическим явлениям, смогли появиться такие изобретения, как радио, магнитофон и прочая автоматика и электротехника, без которой сложно представить современную жизнь.
Устройство генератора переменного тока
Генератор переменного тока – это устройство, которые преобразует механическую энергию, в электрическую.
Состоит он из неподвижной части, которая называется статор или якорь (см. рисунок) и вращающейся части — ротор или индуктор. В генераторе переменного тока ротор — это электромагнит, который обеспечивает магнитное поле, которое передается на статор. На внутренней поверхности статора есть осевые впадины, так называемые пазы, в которых расположена обмотка переменного тока (проводник). Статор генератора изготавливается из 0.35 мм спрессованных стальных листов, которые изолированы покрытой лаком пленкой. Эти листы устанавливаются в станине устройства. Ротор крепится внутри статора и вращается посредством двигателя. Вал – одна из деталей, для передачи крутящего момента под действием расположенных на нём опор. На общем валу с генератором, располагается так называемый возбудитель постоянного тока, который питает постоянным током обмотки ротора. Аккумулятор в генераторе переменного тока выполняет функции стартерной батареи, которая имеет свойство накапливать и хранить электроэнергию при нехватке в отсутствии работы двигателя и при нехватке мощности, которую развивает генератор.
Применение генераторов переменного тока в жизни
В течении последних лет, популярность использования электростанций и генераторов переменного тока значительно возросла. Используются они как в промышленных, так и в бытовых сферах. Промышленные генераторы являются наилучшим вариантом для использования на производстве, в больницах, школах, магазинах, офисах, бизнес центрах, а так же на строительных площадках, значительно упрощая строительство в тех зонах, где электрификация полностью отсутствует. Бытовые генераторы, более практичные, компактные и идеально подходят для использования в коттедже и загородном доме. Генераторы переменного тока широко применяются в различных областях и сферах благодаря тому, что могут решить множество важных проблем, которые связаны с нестабильной работой электричества или полным его отсутствием.
Обслуживание
Практически любая дизельная электростанция в независимости от ее мощности (500 кВт) и производителя имеет 2 главные составляющие. Это генератор переменного тока и двигатель внутреннего сгорания. Так как поддерживать данные узлы необходимо в рабочем исправном состоянии, в ходе их эксплуатации нужен определенный перечень обязательных работ по их техническому обслуживанию. К сожалению, подавляющее большинство владельцев считает, что можно ограничиться лишь своевременной заменой масла и фильтра, при этом «техническое обслуживание» можно провести и самостоятельно. Но результатом этого зачастую становится полный отказ работы устройства. В результате чего, не сложно сделать вывод, что проще и дешевле, доверить оборудование профессионалам, которые благодаря знаниям и огромному опыту, смогут увеличить срок службы ДГУ и сократить расходы при аварийных ситуациях.
Это генератор переменного тока и двигатель внутреннего сгорания. Так как поддерживать данные узлы необходимо в рабочем исправном состоянии, в ходе их эксплуатации нужен определенный перечень обязательных работ по их техническому обслуживанию. К сожалению, подавляющее большинство владельцев считает, что можно ограничиться лишь своевременной заменой масла и фильтра, при этом «техническое обслуживание» можно провести и самостоятельно. Но результатом этого зачастую становится полный отказ работы устройства. В результате чего, не сложно сделать вывод, что проще и дешевле, доверить оборудование профессионалам, которые благодаря знаниям и огромному опыту, смогут увеличить срок службы ДГУ и сократить расходы при аварийных ситуациях.
Погружной электродвигатель (ПЭД) — Добыча нефти и газа
Основным видом погружных электродвигателей, служащих для привода центробежных насосов, являются асинхронные маслонаполненные с короткозамкнутыми роторами двигатели, вертикального исполнения, выполненные в стальном корпусе, цилиндрической формы. При частоте тока 50 Гц синхронная частота вращения их вала равна 3000 оборотов в минуту (частота тока 1 Гц соответствует I обороту вала двигателя в секунду). Диаметр электродвигателей, определяемый внутренним диаметром эксплуатационной колонны, находится в пределах от 96 до 130 мм.
При частоте тока 50 Гц синхронная частота вращения их вала равна 3000 оборотов в минуту (частота тока 1 Гц соответствует I обороту вала двигателя в секунду). Диаметр электродвигателей, определяемый внутренним диаметром эксплуатационной колонны, находится в пределах от 96 до 130 мм.
Основные параметры двигателя: мощность, ток и напряжение, зависят от типоразмера двигателя. В настоящее время выпускают двигатели с номинальной мощностью от 8 до 500 кВт, рабочим током от 18 до 180А и рабочим напряжением от 300 до 3600 В. Малые диаметры и большие мощности вызывают необходимость увеличивать длину двигателей, которая иногда превышает 20 м.
УСЛОВНОЕ ОБОЗНАЧЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕЙ
ПЭД — XXX — XXX
1 2 3
1 — Погружной электродвигатель
2 — Условная мощность двигателя (кВт)
3 — Диаметр корпуса двигателя (мм)
Пример обозначения погружного электро¬двигателя мощностью 45 кВт с диаметром корпуса 117 мм:
ПЭД-45-117
Погружной электродвигатель состоит из статора, ротора, головки и основания.![]()
Статор — неподвижная часть двигателя. Корпус статора изготавливается в виде стальной трубы с резьбой на концах для подсоединения головки и основания электродвигателя. Статор состоит из чередующихся между собой магнитных (активных) и немагнитных пакетов, которые запрессованы в корпус.
Пакеты собираются из отдельных кольцевых пластин с отверстиями (пазами). Пластины активных пакетов штампуются из электротехнической стали, а немагнитных пакетов из латуни или немагнитной стали. Немагнитные пакеты служат опорами для промежуточных подшипников ротора. Количество активных пакетов статора зависит от мощности двигателя, а немагнитных определяется количеством промежуточных подшипников ротора. Сборка пакетов имеет сквозные пазы, в которые уложена изолированная трехфазная протяжная обмотка из специального обмоточного провода. Фазы обмотки соединены в «звезду», а выводные концы обмотки статора соединяются с выводными концами колодки кабельного ввода и изолируются.
Внутри статора размещается ротор, который представляет собой набор пакетов, разделенных между собой промежуточными подшипниками и последовательно надетыми на вал.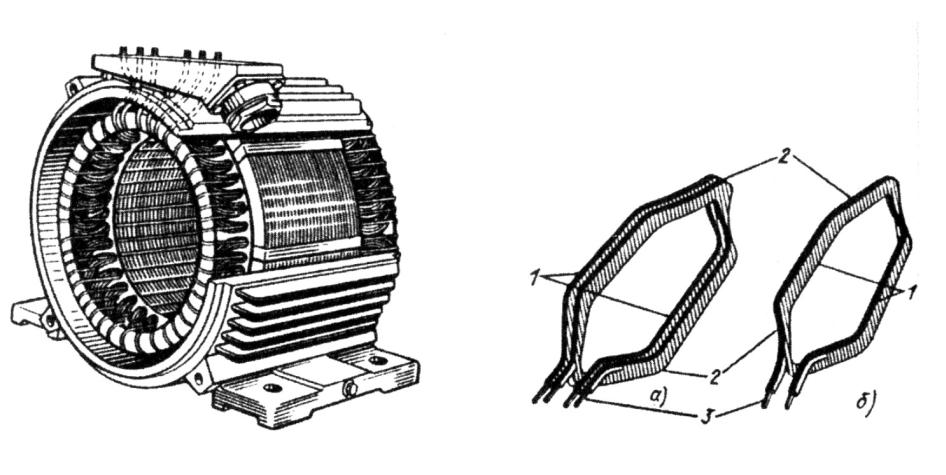 Вал пустотелый и имеет продольные отверстия диаметром 6-8 мм для циркуляции масла, которым заполнен двигатель. Пакеты ротора собираются из отдельных кольцевых пластин электротехнической стали, внешний диаметр которых меньше внутреннего
Вал пустотелый и имеет продольные отверстия диаметром 6-8 мм для циркуляции масла, которым заполнен двигатель. Пакеты ротора собираются из отдельных кольцевых пластин электротехнической стали, внешний диаметр которых меньше внутреннего
диаметра пластин статора. В пазы каждого пакета ротора вставлены медные стержни, которые, с обеих сторон пакета, спаиваются с медными кольцами, образуя так называемое «беличье колесо». Пакеты ротора удерживаются на валу стопорными кольцами. Передача крутящего момента от пакетов ротора к валу осуществляется посредством продольной шпонки, которая укладывается в продольные пазы вала и пакетов ротора. Количество пакетов ротора соответствует количеству активных пакетов статора. Между пакетами ротора на вал устанавливают подшипники скольжения, которые опираются на немагнитные пакеты ротора.
Головка вворачивается в верхнюю часть корпуса статора. В головке располагается узел опорного подшипника, который воспринимает осевые нагрузки от веса ротора и узел токоввода, служащий для питания обмотки статора.
Узел опорного подшипника состоит из пяты, которая крепится на вал ротора и подпятника, который устанавливается в головке. В пяте имеется два отверстия, которые играют роль турбинки для создания циркуляции масла во внутренней полости двигателя. Подпятник имеет шесть сегментов, между которыми в зону трения подается масло.
Узел токоввода содержит электроизоляционную колодку, внутри которой размещены контактные гильзы, связанные с выводами обмотки статора.
В основании, расположенном в нижней части электродвигателя, размещается масляный фильтр и нижний подшипник, при помощи которого центруется нижняя часть вала ротора.
При использовании двухкорпусной гидрозащиты, в основании дополнительно размещается перепускной клапан, который обеспечивает сообщение полости электродвигателя с компенсатором. Для защиты двигателя от проникновения в его полость окружающей пластовой жидкости, для охлаждения обмоток и смазывания подшипников, двигатель заполняется специальным маслом.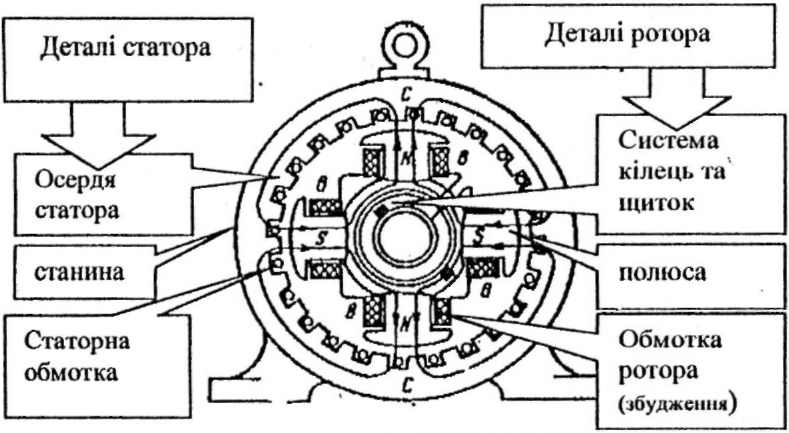 Циркуляция масла внутри двигателя осуществляется из полости фильтра по внутреннему отверстию в валу, затем масло поступает для смазки радиальных подшипников, откуда попадает в зазор между статором и ротором и возвращается к фильтру. Циркулирующее внутри двигателя масло передает тепло статору и через железо и корпус статора — омывающей двигатель пластовой жидкости. Поэтому для охлаждения двигателя необходимо непрерывное протекание пластовой жидкости по кольцевому зазору между корпусом электродвигателя и эксплуатационной колонной. И чем больше будет скорость прохождения пластовой жидкости, тем лучше будет осуществляться охлаждение ПЭД.
Циркуляция масла внутри двигателя осуществляется из полости фильтра по внутреннему отверстию в валу, затем масло поступает для смазки радиальных подшипников, откуда попадает в зазор между статором и ротором и возвращается к фильтру. Циркулирующее внутри двигателя масло передает тепло статору и через железо и корпус статора — омывающей двигатель пластовой жидкости. Поэтому для охлаждения двигателя необходимо непрерывное протекание пластовой жидкости по кольцевому зазору между корпусом электродвигателя и эксплуатационной колонной. И чем больше будет скорость прохождения пластовой жидкости, тем лучше будет осуществляться охлаждение ПЭД.
В настоящее время выпускают электродвигатели различных исполнений по теплостойкости для работы в пластовой жидкости с разной рабочей температурой. Теплостойкость ПЭД является основным параметром для эксплуатирующего персонала, поскольку оказывает влияние на режим эксплуатации ПЭД, на режим проведения тепловых обработок, а также на процесс вывода скважины на режим.
Принцип работы асинхронного двигателя.
В обмотке статора, при ее включении в сеть трехфазного тока, возникает вращающееся магнитное поле, которое пересекает стержни ротора и наводит в них электродвижущую силу. Так как стержни ротора замкнуты, то в них под действием этой силы возникнет ток. Этот ток, взаимодействуя с магнитным полем, создает вращающий момент, под воздействием которого ротор придет во вращение. Направление вращения ротора будет совпадать с направлением вращения поля статора, однако по скорости вращения ротор будет немного отставать от поля статора, поэтому эти двигатели называются асинхронными. Таким образом, электрическая энергия, поступающая в обмотку статора из сети, преобразуется в механическую энергию вращения вала ПЭД.
Похожие статьи:
РЭНГМ → Центробежный насос (ЭЦН)
РЭНГМ → Погружной вентильный двигатель (ВЭД)
РЭНГМ → Погружной насос для скважины
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе.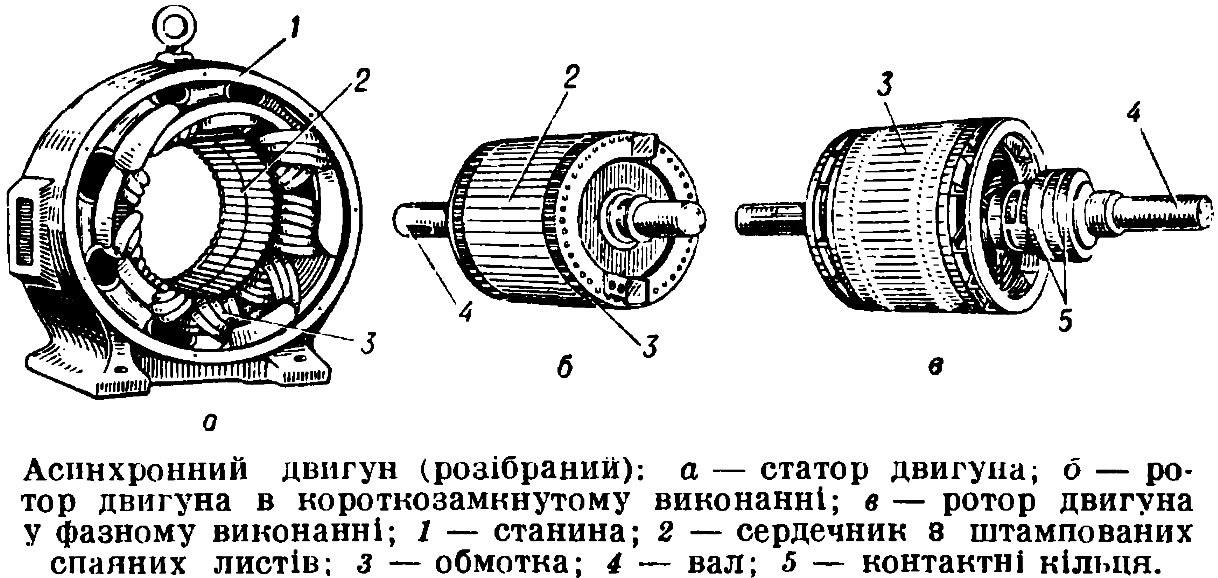 Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Принцип работы асинхронного двигателя может быть разработан, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на рисунке, ток в фазе a является максимально положительным, а в фазах b и c — вдвое отрицательным.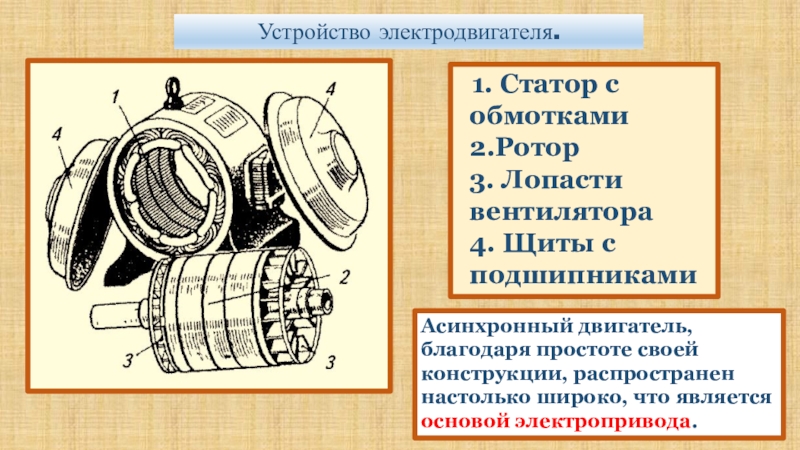 Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный. Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки.Исследование распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный. Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки.Исследование распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.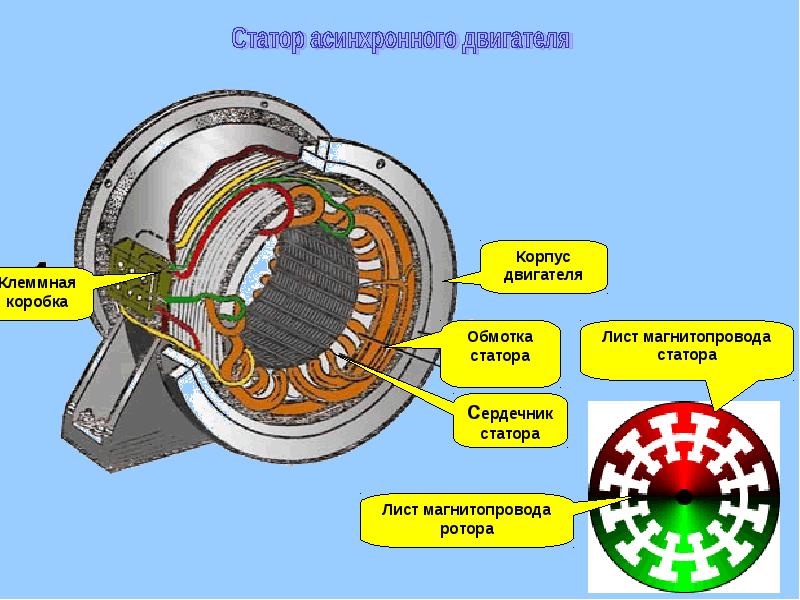
Вращательное движение магнитного поля относительно проводников ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора закорочены вместе на каждом конце, в результате в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника.На этом рисунке показана диаграмма токов ротора для мгновенного t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение снижается, что приводит к пропорциональному уменьшению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Таким образом, индуцированное напряжение снижается, что приводит к пропорциональному уменьшению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc. Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке складывается из синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
токами ротора на рисунке.Общий ток статора в каждой фазной обмотке складывается из синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты, построив машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Базовые знания обмотки статора
Обмотка статора — это обмотка, установленная на статоре, то есть медная проволока, намотанная вокруг статора. Обмотка — это общий термин для однофазной или всей электромагнитной цепи, состоящей из нескольких катушек или катушек. По форме обмотки катушки и способу встроенной проводки двигатель можно разделить на централизованный и распределенный типы. Намотка и установка централизованных обмоток относительно просты, но их эффективность и рабочие характеристики невысоки.В настоящее время большинство статоров двигателей переменного тока имеют распределенные обмотки. В зависимости от типа машин, моделей и условий процесса намотки катушек для каждого двигателя разрабатываются разные типы и характеристики обмоток. Обмотку статора можно разделить на явный полюсный тип и неявный полюсный тип в соответствии с соотношением между количеством полюсов и распределением обмоток.
Краткое введение :
Статор двигателя — важная часть генератора и стартера.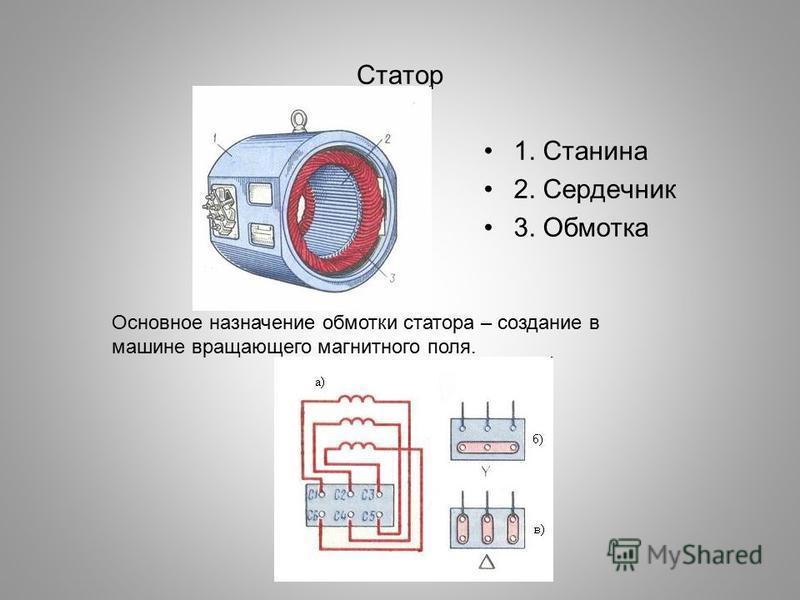 Статор — важная часть двигателя. Статор состоит из трех частей: сердечника статора, обмотки статора и станины машины. Основная функция статора — создавать вращающееся магнитное поле, а основная функция ротора — генерировать (выводить) ток путем резки магнитной проволоки во вращающемся магнитном поле.
Статор — важная часть двигателя. Статор состоит из трех частей: сердечника статора, обмотки статора и станины машины. Основная функция статора — создавать вращающееся магнитное поле, а основная функция ротора — генерировать (выводить) ток путем резки магнитной проволоки во вращающемся магнитном поле.
Централизованная обмотка :
Централизованная обмотка используется в статоре с явным полюсом. Обычно его наматывают в прямоугольную катушку, оборачивают и формируют лентой основы, затем сушат окунанием краской и заделывают в сердечник выступающего полюса.Обычно катушка возбуждения коллекторного двигателя (включая двигатель постоянного тока и двигатель общего назначения) и обмотка главного полюса однофазного двигателя с явнополюсным кожухом имеют централизованную обмотку.
Централизованная обмотка обычно имеет по одной катушке на каждом полюсе, но она также принимает форму общего полюса (скрытого полюса). Например, двигатель рамного типа с закрытыми полюсами — это двигатель, в котором одна катушка образует два полюса.
Распределенная обмотка :
Статор двигателя с распределенной обмоткой не имеет выступа полюсов.Каждый полюс состоит из одной или нескольких катушек, которые встроены и подключены согласно определенным правилам. При электрификации образуются полюса разной полярности, поэтому его еще называют скрытыми полюсами. Распределенные обмотки можно разделить на концентрические обмотки и перекрывающиеся обмотки в соответствии с различными формами расположения встроенной проводки.
1. Концентрическая обмотка :
Концентрическая обмотка состоит из нескольких катушек одинаковой формы, но разных размеров, которые встроены в одно и то же центральное положение в группу катушек в форме петли.Концентрические обмотки могут образовывать двойные или тройные обмотки в соответствии с различными режимами подключения. Обмотки статора однофазных двигателей и некоторых трехфазных асинхронных двигателей с малой мощностью или катушками с большим пролетом используют этот тип.
2. Ламинированная обмотка :
Наборные обмотки обычно состоят из катушек одинаковой формы и размера, с одним или двумя краями катушек, встроенными в каждый паз и равномерно распределенными на каждом конце паза. Сложенную обмотку можно разделить на однослойную и двухслойную.Каждый паз имеет только одну кромку катушки, встроенную в однослойную обмотку или однослойную обмотку; когда каждый паз встроен в два края катушки, принадлежащие разным группам катушек, они отдельно размещаются в верхнем и нижнем слоях паза, что называется двухслойной обмоткой или двухслойной обмоткой. В соответствии с вариацией режима встроенной проводки, перекрывающаяся обмотка может также выводить уравнение перекрестного, концентрического перекрестного и однослойного гибридного. В настоящее время обмотки статора трехфазных асинхронных двигателей большей мощности представляют собой в основном двухслойные обмотки, тогда как в малых двигателях в основном используются производные обмотки однослойных обмоток, но редко используются однослойные обмотки.
Разница между статором и ротором (со сравнительной таблицей)
Статор и ротор являются частями электродвигателя. Существенная разница между ротором и статором заключается в том, что ротор — это вращающаяся часть двигателя, а статор — это неподвижная часть двигателя. Другие различия между статором и ротором показаны ниже в сравнительной таблице.
Рама статора , сердечник статора и обмотка статора являются частями статора .Рама поддерживает сердечник статора и защищает их трехфазную обмотку. Сердечник статора несет вращающееся магнитное поле, индуцируемое трехфазным питанием.
Ротор расположен внутри сердечника статора . Беличья клетка и ротор с фазовой намоткой являются типами ротора. Обмотка ротора возбуждается источником постоянного тока. Обмотка возбуждения создает постоянное магнитное поле в сердечнике ротора.
Содержание: Статор против ротора
- Сравнительная таблица
- Определение
- Ключевые отличия
- Заключение
Сравнительная таблица
| Основа для сравнения | Статор | Ротор |
|---|---|---|
| Определение | Это неподвижная часть машины | Это вращающаяся часть двигателя. |
| Детали | Наружная рама, сердечник статора и обмотка статора. | Обмотка ротора и сердечник ротора |
| Электропитание | Трехфазное электропитание | Электропитание постоянного тока |
| Обмотка | Сложная | Легкая |
| Изоляция | Тяжелая | Меньше |
| Потери на трение | Высокие | Низкие |
| Охлаждение | Легко | Сложное |
Определение статора
Статор — это статическая часть двигателя.Основная функция статора — создание вращающегося магнитного поля. Рама статора, сердечник статора и обмотка статора являются тремя частями статора. Сердечник статора поддерживает и защищает трехфазную обмотку статора. Штамповка из высококачественной кремнистой стали составляет сердечник статора.
Определение ротора
Вращающаяся часть двигателя называется ротором.:format(png)/06a9259bd1bfb91.s.siteapi.org/img/1e43b8804b3d33a71160c2d314a622538cb6cd1e.jpg) Сердечник ротора и обмотка ротора являются частью ротора. Обмотка ротора возбуждается источником постоянного тока.Беличья клетка и фазовая намотка — это типы ротора.
Сердечник ротора и обмотка ротора являются частью ротора. Обмотка ротора возбуждается источником постоянного тока.Беличья клетка и фазовая намотка — это типы ротора.
Сердечник ротора с короткозамкнутым ротором выполнен из железного цилиндрического сердечника. На внешней поверхности сердечника имеется полукруглая прорезь, на которой размещаются медные или алюминиевые проводники. На концах жилы закорачиваются с помощью алюминиевых или медных колец.
Работа ротора и статора
Статор создает вращающееся магнитное поле из-за трехфазного питания.Если ротор находится в состоянии покоя, то в них возникает электромагнитная сила из-за явления электромагнитной индукции.
Электромагнитная индукция — это явление, при котором ЭДС индуцируется в проводнике с током из-за переменного магнитного поля. В роторе возникает ток, который заставляет ротор двигаться.
Ключевые различия между статором и ротором
- Статор — это неподвижная часть машины, а ротор — это подвижная часть машины.

- Сердечник статора, обмотка статора и внешняя рама являются тремя частями статора, тогда как сердечник ротора и обмотка возбуждения являются частями ротора.
- Трехфазное питание подается на обмотку статора. Ротор возбуждается источником постоянного тока.
- Обмотка статора более сложная по сравнению с ротором.
- Обмотка статора сильно изолирована, так как в ней индуцируется высокое напряжение. А у ротора низкая изоляция.
- Размер обмотки статора больше для пропускания сильного тока по сравнению с обмоткой возбуждения.
- Система охлаждения статора лучше по сравнению с ротором, потому что статор неподвижен.
- Потери на трение меньше в роторе по сравнению со статором из-за его небольшого веса.

Заключение
Статическая часть машины известна как статор. А вращающаяся часть машины известна как ротор. Ротор размещен внутри сердечника статора.Трехфазный ток подается на обмотку статора, которая создает вращающееся магнитное поле. Ротор вращается во вращающемся магнитном поле. Таким образом, ЭДС возникает из-за взаимодействия магнитного поля ротора и статора.
Ротор вращается во вращающемся магнитном поле. Таким образом, ЭДС возникает из-за взаимодействия магнитного поля ротора и статора.
Полюс статора — обзор
4.6 Методология намотки катушки
На рис. 4.20 показан метод намотки катушки шагового двигателя в геометрической схеме, соответствующей форме статора. На рис. 4.21 показаны обмотки полюсного наконечника статора в физическом контексте.На рисунках можно увидеть пару элементарных катушек, намотанных бифилярно вокруг каждого выступающего полюса статора. Поскольку имеется 8 явных полюсов статора, имеется 16 элементарных катушек. Обратите внимание, что каждая катушка с альтернативным явным полюсом подключена, то есть A1 подключена к A2, подключена к A3, подключена к A4, и аналогично, B1 подключена к B2, подключена к B3, подключена к B4. Другими словами, нет связи между соседними катушками. Система подключения остроумна и лучше всего показана на принципиальной схеме на рис.4.22.
Рис. 4.20. Электрическая схема 8 выступающих полюсов статора шагового двигателя.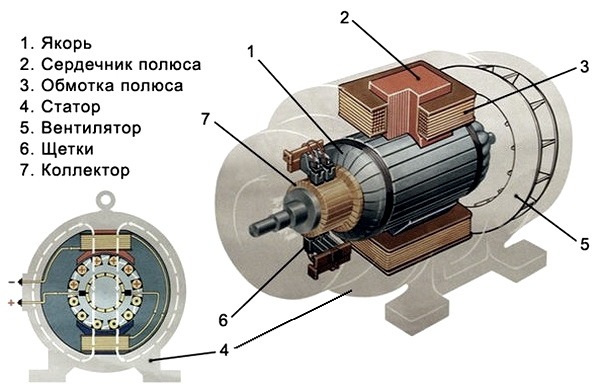 Обратите внимание, что каждый выступающий полюс имеет пару бифилярных обмоток катушек, составляющих в общей сложности 16 элементарных катушек.
Обратите внимание, что каждый выступающий полюс имеет пару бифилярных обмоток катушек, составляющих в общей сложности 16 элементарных катушек.
Рис. 4.21. Электрическая схема, показанная в физическом контексте, восьми явнополюсных обмоток катушки шагового двигателя. Обратите внимание, что каждый выступающий полюс имеет пару бифилярных обмоток катушек, составляющих всего 16 катушек. На диаграмме сложно следовать. Нужен острый карандаш, чтобы проследить каждую проволоку от начальной точки до конечной.Будьте осторожны, чтобы различать провода и железный статор.
Рис. 4.22. Схема электрических соединений 16 элементарных катушек обмоток выступающих полюсов статора. Обратите внимание на оригинальное расположение обмоток. Имеется восемь бифилярных катушек. Катушки с бифилярной обмоткой имеют противоположную проводку: «с обратной связью» и «с прямой проводкой». Расположение обмоток означает, что возможна как однополярная, так и биполярная последовательность переключения.
Система электропроводки позволяет использовать схему силового привода однополярного привода или схему силового привода биполярного привода. Для униполярной схемы привода необходимо использовать желтый и белый разъемы, как показано на рис. 4.21 и 4.22, но биполярный привод — нет. Оказывается, в настоящее время схема униполярного привода полезна только в качестве академического упражнения. Авторы разработали униполярную схему однажды, чтобы продемонстрировать студентам, и эта схема будет показана позже, но биполярная схема действительно сделала однополярную схему устаревшей. Это связано с улучшением характеристик и снижением стоимости технологии транзисторных интегральных схем, например, драйвера Киза, рис.4.1. Униполярный метод управления неэффективен, потому что только четверть обмоток используется в любое время для создания крутящего момента. Также требуются резисторы потери мощности, чтобы катушки могли питаться высоким напряжением питания, чтобы обеспечить высокую производительность, и это приводит к потере мощности в силовых резисторах. Таким образом, униполярный метод вождения неэффективен как в электрическом, так и в электромагнитном отношении.
Для униполярной схемы привода необходимо использовать желтый и белый разъемы, как показано на рис. 4.21 и 4.22, но биполярный привод — нет. Оказывается, в настоящее время схема униполярного привода полезна только в качестве академического упражнения. Авторы разработали униполярную схему однажды, чтобы продемонстрировать студентам, и эта схема будет показана позже, но биполярная схема действительно сделала однополярную схему устаревшей. Это связано с улучшением характеристик и снижением стоимости технологии транзисторных интегральных схем, например, драйвера Киза, рис.4.1. Униполярный метод управления неэффективен, потому что только четверть обмоток используется в любое время для создания крутящего момента. Также требуются резисторы потери мощности, чтобы катушки могли питаться высоким напряжением питания, чтобы обеспечить высокую производительность, и это приводит к потере мощности в силовых резисторах. Таким образом, униполярный метод вождения неэффективен как в электрическом, так и в электромагнитном отношении. Основное преимущество униполярного привода состоит в том, что требуется всего четыре транзистора. Фактически, резисторы потери мощности можно сделать резервными с помощью схемы возбуждения прерывателя.С другой стороны, метод управления с биполярной схемой при использовании схемы прерывания с управлением током является высокоэффективным и имеет высокие характеристики, поскольку отсутствуют резисторы потери мощности, катушки используются на 50%, а механическая выходная мощность увеличивается.
Основное преимущество униполярного привода состоит в том, что требуется всего четыре транзистора. Фактически, резисторы потери мощности можно сделать резервными с помощью схемы возбуждения прерывателя.С другой стороны, метод управления с биполярной схемой при использовании схемы прерывания с управлением током является высокоэффективным и имеет высокие характеристики, поскольку отсутствуют резисторы потери мощности, катушки используются на 50%, а механическая выходная мощность увеличивается.
На Рис. 4.22 показана принципиальная схема бифилярных обмоток, намотанных на каждый выступающий полюсный наконечник статора. Здесь можно увидеть, что каждая бифилярная обмотка подключена противоположно, как «вперед», так и «назад».Причина этого показана на рис. 4.23. Рис. 4.23A и B показывают два типа униполярного соединения набора обмоток статора либо набора обмоток, A1, A2, A3, A4, либо набора обмоток, B1, B2, B3, B4. Точно так же на фиг. 4.23A и B показывают два типа биполярного соединения. Эти рисунки показывают, что однополярное соединение использует только половину доступного набора обмоток, тогда как биполярное соединение использует весь набор обмоток. Кроме того, обмотки, независимо от того, соединены ли они как униполярные или биполярные, создают чередующиеся направления магнитодвижущей силы, mmf, которые будут вызывать соответствующее притяжение полюсных наконечников, которые будут показаны ниже.
Эти рисунки показывают, что однополярное соединение использует только половину доступного набора обмоток, тогда как биполярное соединение использует весь набор обмоток. Кроме того, обмотки, независимо от того, соединены ли они как униполярные или биполярные, создают чередующиеся направления магнитодвижущей силы, mmf, которые будут вызывать соответствующее притяжение полюсных наконечников, которые будут показаны ниже.
Рис. 4.23. Создание магнитного поля с использованием униполярных и биполярных соединений обмоток. (A) Униполярное соединение # 1. (B) Униполярное соединение # 2. (C) Биполярное соединение # 1. (D) Биполярное соединение # 2.
Прежде чем обсуждать электромагнитное силовое взаимодействие между полюсными наконечниками ротора и статора, необходимо пояснить геометрическую конструкцию. Прежде всего, ротор имеет 50 зубцов, равных промежуткам между ними, другими словами, 50 зубцов и 50 зазоров с единичным отношением зубьев к зазору, рис.4.6 и 4.24. Статор имеет восемь полюсных наконечников, расположенных на равном расстоянии друг от друга, то есть каждый полюсный наконечник разделен на 45 градусов. Каждый полюс статора имеет 6 зубцов, которые идентичны зубьям и зазорам ротора. Таким образом, на всех полюсных наконечниках статора 8 × 6 = 48 зубцов. У ротора 50 зубцов, так что у статора 2 «недостающих» зуба. Поскольку между полюсными наконечниками статора имеется восемь зазоров, недостающие зубья полюсного наконечника составляют ½ шага между полюсными наконечниками статора, рис. 4.24.
Каждый полюс статора имеет 6 зубцов, которые идентичны зубьям и зазорам ротора. Таким образом, на всех полюсных наконечниках статора 8 × 6 = 48 зубцов. У ротора 50 зубцов, так что у статора 2 «недостающих» зуба. Поскольку между полюсными наконечниками статора имеется восемь зазоров, недостающие зубья полюсного наконечника составляют ½ шага между полюсными наконечниками статора, рис. 4.24.
Рис. 4.24. Геометрическая схема ротора и статора.
Теперь обратимся к рис. 4.24 и 4.25 вверху слева, и обратите внимание, что на изображении ротор показан с шестью зубьями, выровненными с шестью зубьями полюсного наконечника статора A1. Из-за геометрии статора и ротора зубья ротора также совпадают с полюсным наконечником статора A3, который диаметрально противоположен A1. В то же время шесть зазоров ротора , а не зубцы, совпадают с шестью зубьями полюсов статора A2 и A4, другими словами, имеется выравнивание разности фаз на 180 градусов с полюсами A1 и A3. Если теперь ротор повернуть на шага зуба по часовой стрелке, то есть на 1.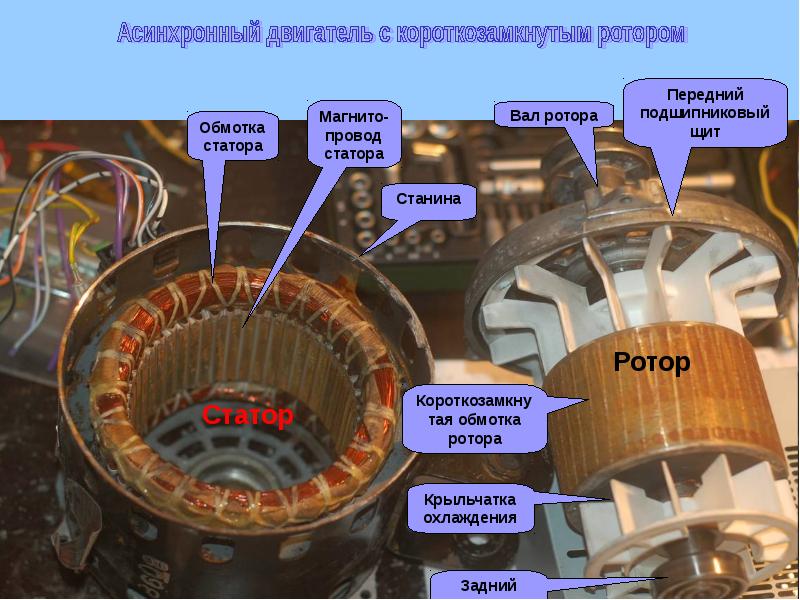 8 градусов, тогда шесть зубцов ротора будут совмещены с зубьями полюсов B1 и B3, а шесть зазоров ротора будут совмещены с зубьями полюсов B2 и B4. Если ротор вращается на шага зуба против часовой стрелки, то выравнивание зазора зуба ротора B2, B4 переключается с B1, B3.
8 градусов, тогда шесть зубцов ротора будут совмещены с зубьями полюсов B1 и B3, а шесть зазоров ротора будут совмещены с зубьями полюсов B2 и B4. Если ротор вращается на шага зуба против часовой стрелки, то выравнивание зазора зуба ротора B2, B4 переключается с B1, B3.
Рис. 4.25. Приращения шага вращения ротора, показывающие совмещения зубцов ротора и статора и зазора между зубьями статора, которые происходят каждые 1/200 оборота, то есть каждые 1,8 градуса.
Если теперь ротор повернуть еще на 1,8 градуса по часовой стрелке, из положения ротора 0 градусов в положение ротора 1.8 градусов, рис. 4.25 вверху справа, тогда будет совмещение зубцов ротора с зубьями статора с B1 и B3 и зубчатый зазор ротора с зубьями статора с B2 и B4. Третья из четвертых комбинаций совмещения зубьев и зазора происходит при положении ротора 3,6 градуса, рис. 4.25 внизу справа и четвертая комбинация при положении ротора 5,4 градуса, рис. 4.25 внизу слева. Эти положения ротора приводятся в действие последовательными электромагнитными силами, которые будут объяснены ниже. Последовательность означает, что ротор шагового двигателя может вращаться по часовой или против часовой стрелки в 1.Шаг 8 градусов, то есть 200 шагов / оборот и, следовательно, шаговый двигатель известен как шаговый двигатель 200 шагов / оборот .
Еще одна интересная особенность такого расположения магнитных сил заключается в том, что силы, действующие на ротор в плоскости бумаги, находятся в статическом равновесии, поэтому нет сил, перпендикулярных оси ротора, которые будут возбуждать вибрации и шум или вызывать изгиб. оси, и при этом не будет сил, закрывающих очень маленький воздушный зазор. Даже если сумма сил, которые велики на ротор в плоскости бумаги, равна нулю, момент этих сил вокруг оси вращения не равен нулю; фактически они суммируются, чтобы помочь друг другу обеспечить рабочий крутящий момент выходного ротора 2 Н · м; это еще одна дань уважения разработчикам шагового двигателя.Здесь также следует сказать, что инженеры-производители заслуживают особой признательности за недорогое прецизионное изготовление и сборку «скромного» шагового двигателя. Теперь мы переходим к обсуждению распределения магнитного потока в шаговом двигателе.
Что такое трехфазный двигатель и как он работает?
Трехфазные двигатели (также численно обозначаемые как трехфазные двигатели) широко используются в промышленности и стали рабочей лошадкой многих механических и электромеханических систем из-за их относительной простоты, проверенной надежности и длительного срока службы.Трехфазные двигатели являются одним из примеров типа асинхронного двигателя, также известного как асинхронный двигатель, который работает на принципах электромагнитной индукции. Хотя существуют также однофазные асинхронные двигатели, эти типы асинхронных двигателей реже используются в промышленных приложениях, но широко используются в бытовых приложениях, таких как пылесосы, компрессоры холодильников и кондиционеры, из-за использования однофазных двигателей. фаза переменного тока в домах и офисах. В этой статье мы обсудим, что такое трехфазный двигатель, и опишем, как он работает.Чтобы получить доступ к другим ресурсам о двигателях, обратитесь к одному из наших других руководств по двигателям, охватывающим двигатели переменного тока, двигатели постоянного тока, асинхронные двигатели, или к более общей статье о типах двигателей. Полный список статей о моторах можно найти в разделе статей по теме.
Что такое трехфазное питание?
Чтобы понять трехфазные двигатели, полезно сначала понять трехфазную мощность.
При производстве электроэнергии переменный ток (AC), создаваемый генератором, имеет характеристику, состоящую в том, что его амплитуда и направление меняются со временем.Если графически отображать амплитуду по оси y и время по оси x, соотношение между напряжением или током в зависимости от времени будет напоминать синусоидальную волну, как показано ниже:
Рисунок 1 — Однофазный переменный ток
Изображение предоставлено: Фуад А. Саад / Shutterstock.com
Электроэнергия, подаваемая в дома, является однофазной, это означает, что имеется один токоведущий провод плюс нейтраль и заземление. В трехфазном питании, которое используется в промышленных и коммерческих условиях для работы более крупного оборудования, которое требует большей мощности, есть три проводника электрического тока, каждый из которых работает с разностью фаз 120 o 2π / 3. радианы друг от друга.Если рассматривать графически, каждая фаза будет выглядеть как отдельная синусоида, которая затем объединяется, как показано на изображении ниже:
Рисунок 2 — Трехфазное электрическое питание со сдвигом фаз 120
o между каждой фазойИзображение предоставлено: teerawat chitprung / Shutterstock.com
Трехфазные двигатели питаются от электрического напряжения и тока, которые генерируются как трехфазная входная мощность и затем используются для выработки механической энергии в виде вращающегося вала двигателя.
Что такое трехфазный двигатель?
Трехфазные двигатели — это тип двигателя переменного тока, который является конкретным примером многофазного двигателя. Эти двигатели могут быть асинхронными двигателями (также называемыми асинхронными двигателями) или синхронными двигателями. Двигатели состоят из трех основных компонентов — статора, ротора и корпуса.
Статор состоит из ряда пластин из легированной стали, вокруг которых намотана проволока, образуя индукционные катушки, по одной катушке на каждую фазу источника электроэнергии.Катушки статора питаются от трехфазного источника питания.
Ротор также содержит индукционные катушки и металлические стержни, соединенные в цепь. Ротор окружает вал двигателя и представляет собой компонент двигателя, который вращается для выработки механической энергии на выходе двигателя.
Корпус двигателя удерживает ротор с валом двигателя на комплекте подшипников для уменьшения трения вращающегося вала. Корпус имеет торцевые крышки, удерживающие опоры подшипников и вентилятор, прикрепленный к валу двигателя, который вращается при вращении вала двигателя.Вращающийся вентилятор втягивает окружающий воздух снаружи корпуса и заставляет воздух проходить через статор и ротор для охлаждения компонентов двигателя и рассеивания тепла, которое генерируется в различных катушках от сопротивления катушки. Кожух также обычно имеет выступающие механические ребра снаружи, которые служат для дальнейшего отвода тепла в наружный воздух. Торцевая крышка также обеспечит место для электрических соединений для трехфазного питания двигателя.
Как работает трехфазный двигатель?
Трехфазные двигатели работают по принципу электромагнитной индукции, который был открыт английским физиком Майклом Фарадеем еще в 1830 году.Фарадей заметил, что когда проводник, такой как катушка или проволочная петля, помещается в изменяющееся магнитное поле, в проводнике возникает наведенная электродвижущая сила или ЭДС. Он также заметил, что ток, протекающий в проводнике, таком как провод, будет генерировать магнитное поле и что магнитное поле будет изменяться, когда ток в проводе изменяется по величине или направлению. Это выражается в математической форме, связывая ротор электрического поля со скоростью изменения магнитного потока во времени:
Эти принципы составляют основу для понимания того, как работает трехфазный двигатель.
На рисунке 3 ниже показан закон индукции Фарадея. Обратите внимание, что наличие ЭДС зависит от движения магнита, которое приводит к изменению магнитного поля.
Рисунок 3 — Принцип электромагнитной индукции
Изображение предоставлено: Фуад А. Саад / Shutterstock.com
Для асинхронных двигателей, когда статор питается от трехфазного источника электроэнергии, каждая катушка генерирует магнитное поле, полюса которого (северный или южный) меняют положение, когда переменный ток колеблется в течение полного цикла.Поскольку каждая из трех фаз переменного тока сдвинута по фазе на 120, или , магнитная полярность трех катушек не одинакова в один и тот же момент времени. Это условие приводит к тому, что статор производит так называемое RMF или вращающееся магнитное поле. Поскольку ротор находится в центре катушек статора, изменяющееся магнитное поле статора индуцирует ток в катушках ротора, что, в свою очередь, приводит к возникновению противоположного магнитного поля, создаваемого ротором. Поле ротора стремится выровнять свою полярность относительно поля статора, в результате к валу двигателя прикладывается чистый крутящий момент, и он начинает вращаться, пытаясь выровнять свое поле.Обратите внимание, что в трехфазном асинхронном двигателе нет прямого электрического соединения с ротором; магнитная индукция вызывает вращение двигателя.
В трехфазных асинхронных двигателях ротор стремится поддерживать соосность с RMF статора, но никогда не достигает этого, поэтому асинхронные двигатели также называют асинхронными. Явление, которое заставляет скорость ротора отставать от скорости RMF, известно как скольжение, что выражается как:
, где N r — скорость ротора, а N s — синхронная скорость вращающегося поля (RMF) статора.
Синхронные двигатели работают аналогично асинхронным двигателям, за исключением того, что в случае синхронного двигателя поля статора и ротора синхронизированы, так что RMF статора заставляет ротор вращаться с точно такой же скоростью вращения (в синхронизация — значит, скольжение равно 0). Для получения дополнительной информации о том, как это сделать, обратитесь к статьям о реактивных двигателях и бесщеточных двигателях постоянного тока. Обратите внимание, что синхронные двигатели, в отличие от асинхронных двигателей, не нуждаются в питании от сети переменного тока.
Контроллеры двигателей для трехфазных двигателей
Скорость, создаваемая трехфазным двигателем переменного тока, является функцией частоты сети переменного тока, поскольку она является источником RMF в обмотках статора. Поэтому некоторые контроллеры двигателей переменного тока работают, используя вход переменного тока для генерации модулированной или управляемой частоты на входе двигателя, тем самым управляя скоростью двигателя. Другой подход, который можно использовать для управления скоростью двигателя, — это изменение скольжения (описанное ранее).Если скольжение увеличивается, скорость двигателя (то есть скорость ротора) уменьшается.
Чтобы узнать больше о подходах к управлению двигателями, просмотрите нашу статью о контроллерах двигателей переменного тока.
Резюме
В этой статье представлено краткое обсуждение того, что такое трехфазные двигатели и как они работают. Чтобы узнать больше о двигателях, ознакомьтесь с нашими соответствующими статьями, перечисленными ниже. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://kebblog.com/how-a-3-phase-ac-induction-motor-works/
- https://www.engineering.com/ElectronicsDesign/ElectronicsDesignArticles/ArticleID/15848/Three-Phase-Electric-Power-Explained.aspx
- http://www.oddparts.com/oddparts/acsi/defines/poles.htm
- http://www.gohz.com/how-to-determine-the-pole-number-of-an-induction-motor
- https://www.elprocus.com/induction-motor-types-advantages/
- https: // www.intechopen.com/books/electric-machines-for-smart-grids-applications-design-simulation-and-control/single-phase-motors-for-household-applications
- https://www.worldwideelectric.net/resource/construction-ac-motors/
Прочие изделия из двигателей
Больше от Machinery, Tools & Supplies
Шесть ключевых компонентов, из которых состоит ваш промышленный электродвигатель
Ваш промышленный электродвигатель имеет несколько важных компонентов, которые позволяют ему эффективно преобразовывать электрическую энергию в механическую.Каждый из них помогает управлять критическим взаимодействием между магнитным полем вашего двигателя и электрическим током в его проволочной обмотке, создавая силу в виде вращения вала. Именно механическая энергия, производимая этим вращением вала, помогает поддерживать бесперебойную работу вашего предприятия.
Эти шесть компонентов включают:
1) Ротор
Ротор — это движущаяся часть вашего электродвигателя. Он вращает вал, который передает указанную выше механическую мощность.В типичной конфигурации в ротор проложены проводники, по которым проходят токи, которые затем взаимодействуют с магнитным полем статора, создавая силы, которые вращают вал. При этом некоторые роторы несут постоянные магниты, а статор удерживает проводники.
2) Статор (и сердечник статора)
Статор — это неподвижная часть электромагнитной цепи вашего двигателя и обычно состоит из обмоток или постоянных магнитов. Сердечник статора состоит из множества тонких металлических листов, называемых пластинами.Ламинирование используется для уменьшения потерь энергии, которые могут возникнуть при использовании твердого сердечника.
3) Подшипники
Ротор вашего электродвигателя поддерживается подшипниками, которые позволяют ему вращаться вокруг своей оси. Эти подшипники, в свою очередь, поддерживаются корпусом двигателя. Вал двигателя проходит через подшипники за пределы двигателя, где действует нагрузка. Поскольку силы нагрузки действуют за пределы самого внешнего подшипника, нагрузка называется «выступающей».
4) Обмотки
Обмотки — это провода, уложенные в катушки, обычно намотанные вокруг многослойного магнитного сердечника из мягкого железа, чтобы образовывать магнитные полюса при подаче тока.Электродвигатели бывают двух основных конфигураций полюсов магнитного поля: явнополюсной и невыраженной. В двигателе с явнополюсным двигателем магнитное поле полюса создается обмоткой, намотанной вокруг полюса под лицевой стороной полюса. В двигателе с невыпадающими полюсами обмотка распределена в пазах на лицевой стороне полюсов. Двигатель с экранированными полюсами имеет обмотку вокруг части полюса, которая задерживает фазу магнитного поля для этого полюса.
5) Воздушный зазор
Воздушный зазор — это расстояние между ротором и статором, хотя и не является физическим компонентом.Воздушный зазор вашего двигателя имеет важное значение и, как правило, должен быть как можно меньше, поскольку большой зазор оказывает сильное негативное влияние на производительность. Это основной источник низкого коэффициента мощности, с которым работают двигатели. Поскольку ток намагничивания увеличивается с увеличением воздушного зазора, ваш воздушный зазор должен быть минимальным. При этом очень маленькие зазоры могут создавать механические проблемы в дополнение к шуму и потерям.
6) Коммутатор
И, наконец, коммутатор — это механизм, используемый вашим двигателем для переключения входа большинства двигателей постоянного тока и некоторых двигателей переменного тока.Он состоит из сегментов контактного кольца, которые изолированы друг от друга и от вала. Ток якоря вашего двигателя подается через неподвижные щетки, контактирующие с вращающимся коммутатором, что вызывает требуемое реверсирование тока и подает мощность на машину оптимальным образом по мере вращения ротора от полюса к полюсу. (Отсутствие такого реверсирования тока может привести к остановке двигателя.)
Что общего у всех этих компонентов?
Каждый из них может нуждаться в техническом обслуживании, ремонте или замене в любой момент.Именно здесь на помощь приходит Red Stick Armature Works. Мы обеспечиваем более 60 лет передового опыта в области обслуживания, хранения и продажи промышленных электродвигателей. Наши преданные своему делу и опытные специалисты доступны на месте 24-7-365, чтобы помочь вам поддерживать ваши двигатели — и ваши операции — в рабочем состоянии и работать без сбоев. Свяжитесь с нами или позвоните нам сегодня по телефону 800-895-0443, чтобы узнать больше.
Конструкция электродвигателей переменного тока
Если вы прочитали нашу предыдущую статью «Двигатели переменного тока: основная терминология, то теперь вы понимаете:
- Назначение электродвигателей переменного тока
- Стандарты NEMA для электрического оборудования и
- Основная концепция крутящего момента. , скорость и мощность.
Теперь мы обсудим конструкцию двигателей переменного тока, чтобы вы могли определить ключевые отличия деталей двигателя и то, как каждый продукт работает для любого конкретного применения.
Конструкция двигателей переменного тока
В промышленности часто используются асинхронные двигатели переменного тока. Мы обсудим 3-фазные асинхронные асинхронные двигатели 460 В переменного тока. Когда скорость вращающегося магнитного поля больше скорости ротора, вы знаете, что это асинхронный двигатель (см. Рисунок). Двигатель переменного тока состоит из трех основных частей: статора, ротора и корпуса.
Конструкция статора
Статор и ротор на самом деле представляют собой электрические цепи, которые работают как электромагниты. Статор — это электрическая часть двигателя, которая не движется. Для двигателя NEMA сердечник статора состоит из нескольких сотен тонких пластин.
Обмотки статора
Пластины статора образуют полый цилиндр. В каждый паз сердечника статора помещается катушка изолированного провода. Электромагнит образован каждой группой катушек и окружающим их стальным сердечником.Двигатели работают благодаря электромагнетизму. Источник питания напрямую подключен к обмоткам статора.
Конструкция ротора
В электромагнитной цепи ротор — это вращающаяся часть. Ротор с короткозамкнутым ротором является наиболее распространенным типом ротора. Подумайте о вращающихся колесах для упражнений, используемых в клетках для домашних хомяков, и вы поймете, как устроен ротор клетки для беличьих коров. Ротор состоит из пакета стальных пластин, которые включают равномерно разнесенные токопроводящие шины по периметру.
Сердечник ротора образован многослойными пластинами. Алюминий отливается под давлением в пазах сердечника ротора, образуя серию проводников по окружности ротора. Токопроводящие шины электрически и механически соединены с концевыми кольцами. Наконец, сердечник ротора устанавливается на стальной вал.
Корпус двигателя
Корпус состоит из рамы или ярма и двух концевых кронштейнов, также называемых корпусами подшипников. Статор установлен внутри рамы. Ротор находится внутри статора, но разделен небольшим воздушным зазором, поэтому они не имеют прямого физического контакта друг с другом.Кожух предназначен для защиты рабочих и электрических частей двигателя от агрессивных сред, в которых они работают. Подшипники, установленные на валу, поддерживают ротор, что позволяет ему вращаться. На валу установлен вентилятор на тот случай, когда двигатель нужно охладить.