Ротор и статор электродвигателя: определение, виды, назначение
Рано или поздно человек, интересующийся электротехникой, слышит упоминания о роторе и статоре, и задается вопросом: «Что это такое, и в чем отличие этих устройств?» Простыми словами, ротор и статор – это две основные части, расположенные в электродвигателе (устройстве по преобразованию электрической энергии в механическую). Без них существование современных двигателей, а значит и большинства электрических приборов на их основе, было бы невозможным. Статор является неподвижной частью устройства, а ротор – подвижной, они вращаются в разные стороны относительно друг друга. В этой статье мы подробно разберем конструкцию этих деталей и их принцип действия, чтобы после прочтения статьи у читателей сайта Сам Электрик больше не осталось вопросов по данному поводу.Что такое ротор
Ротор, еще его иногда называют якорь, это подвижная, то есть вращающаяся часть в генераторе или электродвигателях, которые повсеместно применяются в бытовой и промышленной технике.
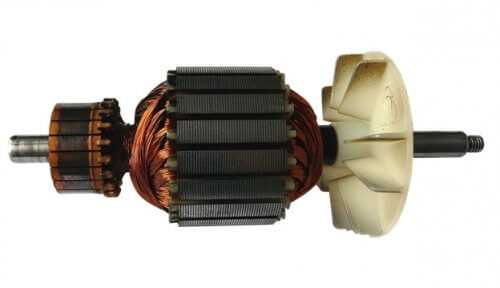
Если рассматривать ротор двигателя постоянного тока или универсального коллекторного двигателя, то он состоит из нескольких основных узлов, а именно:
- Сердечник. Он выполнен из множества штампованных тонких металлических пластин, изолированных друг от друга специальным диэлектриком или же просто оксидной пленкой, которая проводит ток гораздо хуже, чем чистый металл. Сердечник набирается из них и представляет собой «слоеный пирог». В результате электроны не успевают разогнаться из-за маленькой толщины металла, и нагрев ротора гораздо меньше, а эффективность всего устройства выше за счет уменьшения потерь. Данное конструктивное решение принято для уменьшения вихревых токов Фуко, которые неизбежно возникают при работе двигателя из-за перемагничивания сердечника. Этот же метод борьбы с ними используется и в трансформаторах переменного тока.
- Обмотки. Вокруг сердечника особым образом намотана медная проволока, покрытая лаковой изоляцией для предотвращения появления короткозамкнутых витков, которые недопустимы. Вся обмотка дополнительно пропитана эпоксидной смолой или лаком для фиксации обмоток, чтобы они не повреждались при вибрациях от вращения.
- Обмотки ротора могут подключаться к коллектору – специальному блоку с контактами, надежно закрепленному на валу. Эти контакты называются ламелями, они выполнены из меди или ее сплава для лучшей передачи электрического тока. По нему скользят щетки, обычно выполненные из графита, и в нужный момент на обмотки подается электрический ток. Это называется скользящий контакт.
- Сам вал является металлическим стержнем, на его концах расположены посадочные места под подшипники качения, он может иметь резьбу или выемки, пазы под шпонку для крепления шестерен, шкивов или других деталей, приводимых в движение электродвигателем.
- На валу также размещается крыльчатка вентилятора, чтобы двигатель охлаждал сам себя и не приходилось бы устанавливать дополнительное устройство для отвода тепла.
Стоит отметить, что не у всякого ротора есть обмотки, которые, в сущности, представляют собой электромагнит. Вместо них могут применяться постоянные магниты, как в бесщеточных двигателях постоянного тока. А у асинхронного двигателя с короткозамкнутым ротором обмоток в привычном виде вовсе нет, вместо них используются короткозамкнутые металлические стержни, но об этом ниже.
Что такое статор
Статор – это неподвижная часть в электродвигателе. Обычно он совмещен с корпусом устройства и представляет собой цилиндрическую деталь. Он так же состоит из множества пластин для уменьшения нагрева из-за токов Фуко, в обязательном порядке покрытых лаком. На торцах располагаются посадочные места под подшипники скольжения или качения.

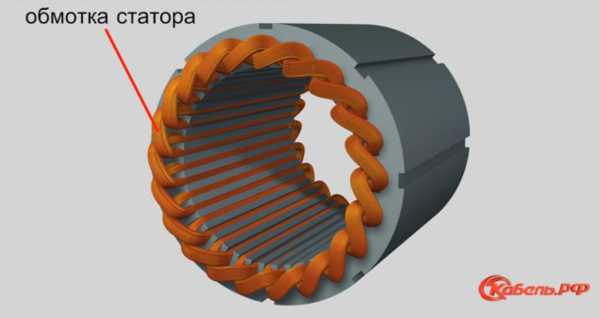
Конструкция называется пакет статора, она впрессовывается в чугунный корпус устройства. Внутри этого цилиндра вытачиваются пазы под обмотки, которые, так же как и для ротора, пропитываются специальными составами, чтобы тепло равномернее распределялось по устройству, и обмотки не терлись друг об друга от вибрации.
Обмотки статора могут подключаться разными способами в зависимости от назначения и типа электрической машины. Для трехфазных электродвигателей применимы типы подключения звезда и треугольник. Они представлены на схеме:
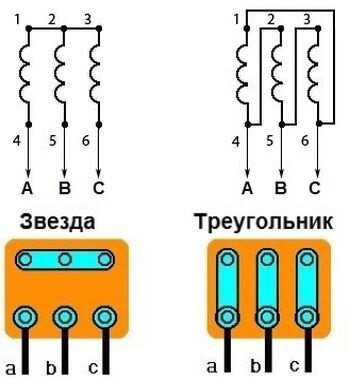
Для выполнения подключений на корпусе устройства предусмотрена специальная распределительная коробка («борно»). В эту коробку выведены начала и концы трех обмоток и предусмотрены специальные клеммники различных конструкций, в зависимости от мощности и назначения машины.
Существуют серьезные отличия в работе двигателей при разном соединении обмоток. Например, при подключении звездой двигатель будет стартовать плавнее, однако нельзя будет развить максимальную мощность. При присоединении треугольником, электродвигатель будет выдавать весь крутящий момент, заявленный производителем, но пусковые токи в таком случае достигают высоких значений. Электросеть может быть просто не рассчитана на такие нагрузки. Использование устройства в этом режиме чревато нагревом проводов, и в слабом месте (это места соединения и разъемы) провод может отгореть и привести к пожару. Главным преимуществом асинхронных двигателей является удобство в смене направления их вращения, нужно просто поменять местами подключения двух любых обмоток.
Статор и ротор в асинхронных двигателях
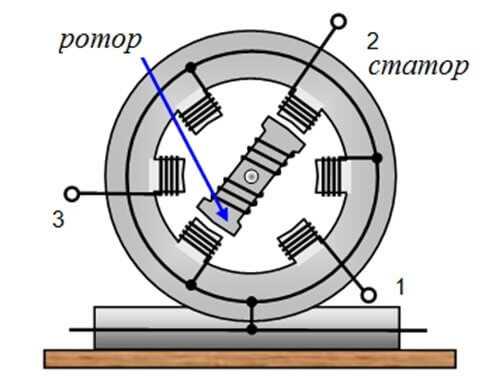
Трехфазные асинхронные двигатели имеют свои особенности, ротор и статор в них отличаются от использованных в других типах электродвигателей. Например, ротор может иметь две конструкции: короткозамкнутый и фазный. Рассмотрим особенности строения каждого из них по подробнее. Однако для начала давайте вкратце разберемся, как работает асинхронный двигатель.
В статоре создается вращающееся магнитное поле. Оно наводит на роторе индуцируемый ток и тем самым приводит его в движение. Таким образом ротор всегда пытается «догнать» вращающееся магнитное поле.
Необходимо также упомянуть о такой важной особенности асинхронного двигателя, как скольжение ротора. Это явление заключается в разности частот вращения ротора и магнитного поля, создаваемого статором. Объясняется это как раз тем, что ток индуцируется в роторе только при его движении относительно магнитного поля. И если бы частоты вращения были одинаковы, то этого движения бы просто не происходило. В результате ротор пытается «догнать» по оборотам магнитное поле, и если это происходит, то ток в обмотках перестает индуцироваться и ротор замедляется. В этот момент сила, действующая на него, растет, он начинает опять ускоряться. Так и получается эффект стабилизации частоты вращения, за что эти электродвигатели и пользуются большой востребованностью.
Короткозамкнутый ротор
Он также представляет собой конструкцию, состоящую из металлических пластин, выполняющих функцию сердечника. Однако вместо медной обмотки там установлены стержни или пруты, не касающиеся друг друга и накоротко замкнутые между собой металлическими пластинами на торцах. При этом стержни не перпендикулярны пластинам, а направлены под углом. Это делается для уменьшения пульсаций магнитного поля и момента. Таким образом получаются витки, замкнутые накоротко, от сюда и название.

Фазный ротор
Главное отличие фазного ротора от короткозамкнутого заключается в наличии трехфазной обмотки, уложенной в проточки сердечника и соединяющейся в особом коллекторе с тремя кольцами вместо ламелей. Эти обмотки обычно соединяются «звездой». Такие электродвигатели более трудоемки в производстве за счет усложнения конструкции, однако их пусковые токи ниже, чем у двигателей с короткозамкнутым ротором, а также они лучше поддаются регулировке.

Надеемся, что после прочтения данной статьи у вас больше не осталось вопросов о том, что такое ротор и статор электродвигателя и какой у них принцип работы. Напоследок рекомендуем просмотреть видео, в котором наглядно рассмотрен данный вопрос:
Материалы по теме:
samelectrik.ru
Статор — это… Что такое Статор?
СТАТОР — (англ. stator от лат. sto стою), неподвижная часть электрической машины, выполняющая функции магнитопровода и несущей конструкции. Термин статор употребляют преимущественно по отношению к машинам переменного тока. Статор состоит из сердечника (с… … Большой Энциклопедический словарь
Статор — электродвигателя 3 x фазного переменного тока Статор (англ. stator, от лат … Википедия
СТАТОР — СТАТОР, статора, муж. (латин stator, букв. тот, кто стоит) (тех.). Неподвижная часть электрических машин, в противоп. ротору. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
СТАТОР — СТАТОР, а, муж. (спец.). Неподвижная часть электрической машины роторного типа. | прил. статорный, ая, ое. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
СТАТОР — (Stator) неподвижная часть электрической машины. Самойлов К. И. Морской словарь. М. Л.: Государственное Военно морское Издательство НКВМФ Союза ССР, 1941 … Морской словарь
СТАТОР — неподвижная часть электр. машин. Термин этот применяется гл. обр. к машинам переменного тока. Технический железнодорожный словарь. М.: Государственное транспортное железнодорожное издательство. Н. Н. Васильев, О. Н. Исаакян, Н. О. Рогинский, Я. Б … Технический железнодорожный словарь
статор — сущ., кол во синонимов: 1 • статер (1) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
статор — статор, мн. статоры, род. статоров и в просторечии статора, статоров … Словарь трудностей произношения и ударения в современном русском языке
Статор — Сталин торжествует имя … Словарь сокращений и аббревиатур
СТАТОР — (1) неподвижная часть электрической машины, выполняющая функции магнитопровода и несущей конструкции; (2) неподвижная часть машины или узла роторного типа, напр. С. компрессора, турбины и т. п … Большая политехническая энциклопедия
статор — а; м. [от лат. stator стоящий неподвижно] Неподвижная (невращающаяся) часть электрических машин (генератора, двигателя и т.п.), состоящая из сердечника и станины. ◁ Статорный, ая, ое. С ое кольцо турбины. С ая обмотка. * * * статор (англ. stator … Энциклопедический словарь
dic.academic.ru
Статор электродвигателей | Полезные статьи
 Статор электродвигателей является неподвижной частью, внутри которой на подшипниках вращается ротор (якорь). Конструктивно статор состоит из станины и сердечника, зафиксированного внутри нее винтами. Станина представляет собой литой или сварной корпус, выполненный из чугуна или алюминия.
Статор электродвигателей является неподвижной частью, внутри которой на подшипниках вращается ротор (якорь). Конструктивно статор состоит из станины и сердечника, зафиксированного внутри нее винтами. Станина представляет собой литой или сварной корпус, выполненный из чугуна или алюминия.
Сердечник статора синхронных и асинхронных двигателей имеет цилиндрическую форму и формируется из профилированных листов электротехнической стали толщиной от 0,35 до 0,5 мм, предварительно отожженных и изолированных лаком. Между собой такие пластины скрепляются продольными швами или скобами таким образом, чтобы профильные вырезы образовывали продольные пазы, в которые укладывается обмотка, состоящая из ряда изолированных и параллельно соединенных проводников. Такая конструкция сердечника позволяет ослабить вихревые токи.
Статор двигателя постоянного тока большой и средней мощности называется индуктор и собирается из главных полюсов, сформированных из листов электротехнической стали, и монолитных добавочных полюсов. В ДПТ малой мощности функцию статора обычно выполняют постоянные магниты.
Обмотка статора электродвигателя: основные особенности 
Взаимное расположение и количество групп обмоток статора синхронных и асинхронных двигателей зависит от их типа и необходимой частоты вращения ротора. Если в каждый паз помещается только одна сторона катушки одной фазы, то такая обмотка называется однослойной. В том случае, если в одном пазу размещаются две катушечные стороны, принадлежащие разным фазам, то обмотка называется двухслойной. В двигателях может быть различное число групп катушек, которые между собой соединяются последовательно.
В трехфазных синхронных и асинхронных электродвигателях обмотки статора расположены с шагом 120°, что позволяет создать вращающееся магнитное поле. В зависимости от величины питающего напряжения обмотки статора соединяются по схеме «звезда» или «треугольник».
В однофазных двигателях имеются две группы обмоток, сдвинутых в пространстве относительно друг друга на 90°. Сдвиг фаз осуществляется благодаря конденсаторам, установленным параллельно одной из обмоток.
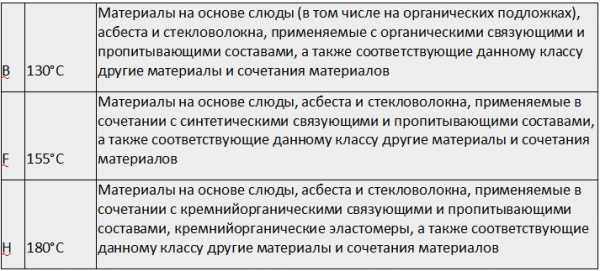
Класс нагревостойкости
В зависимости от условий эксплуатации для выполнения обмоток статора используются провода с различной термической стойкостью изоляции:
cable.ru
Статор и ротор — что это такое?
Существует несколько классов электрических преобразователей, среди которых практическое применение нашли так называемые индуктивные аналоги. В них преобразование энергии происходит за счет преобразования индукции обмоток, являющиеся неотъемлемой частью самого агрегата. Обмотки располагаются на двух элементах – на статоре и роторе. Итак, чем отличаются статор и ротор (что это такое и каковы их функции?).
 Самое простое определение двух частей преобразователя – это их функциональность. Здесь все просто: статор (электродвигателя или генератора) является неподвижной частью, ротор подвижной. В большинстве случаев последний располагается внутри первого, и между ними есть небольшой зазор. Есть так называемые агрегаты с внешним ротором, который представляет собой вращающееся кольцо, внутри которого располагается неподвижный статор.
Самое простое определение двух частей преобразователя – это их функциональность. Здесь все просто: статор (электродвигателя или генератора) является неподвижной частью, ротор подвижной. В большинстве случаев последний располагается внутри первого, и между ними есть небольшой зазор. Есть так называемые агрегаты с внешним ротором, который представляет собой вращающееся кольцо, внутри которого располагается неподвижный статор.
Виды преобразователей
Почему так важно рассмотреть виды, чтобы понять, чем отличается статор электродвигателя от подвижной его части. Все дело в том, что конструктивных особенностей у электродвижков немало, то же самое касается и генераторов (это преобразователи механической энергии в электрическую, электродвигатели имеют обратную функциональность).

Итак, электрические двигатели делятся на аппараты переменного и постоянного тока. Первые в свою очередь разделяются на синхронные, асинхронные и коллекторные. У первых угловая скорость вращения статора и ротора равны. У вторых два эти показателя неравны. У коллекторных видов в конструкции присутствует так называемый преобразователь частоты и количества фаз механического типа, который носит название коллектор. Отсюда и название агрегата. Именно он напрямую связан с обмотками ротора двигателя и его статора.
Машины постоянного тока на роторе имеют тот же коллектор. Но в случае с генераторами он выполняет функции преобразователя, а в случае с электродвигателями функции инвертора.
Если электрический агрегат – это машина, в которой вращается только ротор, то его название – одномерный. Если в нем вращаются в противоположные стороны сразу два элемента, то этот аппарат носит название двухмерный или биротативный.
Асинхронные электродвигатели
Чтобы разобраться в понятиях ротора двигателя и его статора, необходимо рассмотреть один из видов электрических преобразовательных машин. Так как асинхронные электродвижки используются чаще всего в производственном оборудовании и бытовой техники, то стоит рассмотреть именно их.

Итак, что собой представляет асинхронный электродвигатель? Это обычно чугунный корпус, в который запрессован магнитопровод. В нем сделаны специальные пазы, куда укладывается обмотка статора, собранная из медной проволоки. Пазы сдвинуты относительно друг друга на 120º, поэтому их всего три. Они же образуют три фазы.
Ротор в свою очередь – это цилиндр, собранный из стальных листов (сталь штампованная электротехническая), и насажанный на стальной вал, который в свою очередь при сборке электрического движка устанавливается в подшипники. В зависимости от того, как собраны фазные обмотки агрегата, роторы двигателя могут быть фазными или короткозамкнутыми.
- Фазный ротор – это цилиндр, на котором собраны катушки, сдвинутые относительно друг друга на 120º. При этом в его конструкцию установлены три контактных кольца, которые не соприкасаются ни с валом, ни между собой. К кольцам присоединены с одной стороны концы трех обмоток, а с другой графитовые щетки, которые относительно колец располагаются в скользящем контакте. Пример такой машины – это крановые электродвигатели с фазным ротором.
- Короткозамкнутый ротор собирается из медных стержней, которые укладываются в пазы. При этом их соединяют специальным кольцом, изготовленном из меди.
Асинхронный электрический двигатель с фазным ротором является обладателем больших размеров и веса. Но у него отличные свойства, касающиеся пусковых и регулировочных моментов. Двигатели, у которых установлен короткозамкнутый ротор, считаются самыми надежными на сегодняшний день. Они просты в конструкции, поэтому и являются дешевыми. Их единственный недостаток – это большой пусковой ток, с которым сегодня борются соединением обмоток статора со звезды на треугольник. То есть, пуск производится при соединении звездой, после набора оборотов производится переключение на треугольник.
onlineelektrik.ru
Электродвигатель постоянного тока — Википедия
 Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным роторомЭлектродвигатель постоянного тока (ДПТ) — электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
 Схема электродвигателя с двумя обмотками электромагнита на якоре
Схема электродвигателя с двумя обмотками электромагнита на якоре 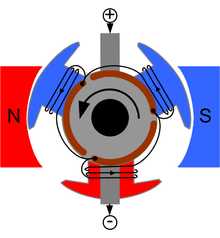 Схема электродвигателя с тремя обмотками электромагнита на якоре
Схема электродвигателя с тремя обмотками электромагнита на якореЭтот двигатель можно ещё назвать синхронной машиной постоянного тока с самосинхронизацией. Простейший двигатель, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), одного электромагнита с явно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками.
Простейший двигатель имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное). В этом случае крутящий момент равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)},
где s{\displaystyle s} — число витков обмотки ротора,
B{\displaystyle B} — индукция магнитного поля полюсов статора,
I{\displaystyle I} — ток в обмотке ротора [А],
L{\displaystyle L} — длина рабочей части витка обмотки [м],
r{\displaystyle r} — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
sin{\displaystyle \sin } — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
w{\displaystyle w} — угловая скорость [рад/сек],
t{\displaystyle t} — время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвуют в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
- n⋅α/(2⋅π){\displaystyle n\cdot \alpha /(2\cdot \pi )},
где n{\displaystyle n} — число щёток,
α{\displaystyle \alpha } — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s{\displaystyle s} рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1 оборот = 2π{\displaystyle 2\pi }):
- Mkrsr=(2⋅∫0πs⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=s⋅2⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Двигатель, показанный на рис. 2, состоит из:
— одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой,
— ротора с тремя зубцами и, соответственно, с тремя обмотками (обмотки ротора при такой конструкции могут быть включены звездой (в столь маломощной машине условия коммутации допускают такое соединение) или треугольником),
— щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками.
Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухзубцовым ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы постоянного тока.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на асинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор (индуктор)[править | править код]
На статоре ДПТ располагаются, в зависимости от конструкции, или постоянные магниты (микродвигатели), или электромагниты с обмотками возбуждения (катушками, наводящими магнитный поток возбуждения).
В простейшем случае статор имеет два полюса, то есть один магнит с одной парой полюсов. Но чаще ДПТ имеют две пары полюсов. Бывает и более. Помимо основных полюсов на статоре (индукторе) могут устанавливаться добавочные полюса, которые предназначены для улучшения коммутации на коллекторе.
Ротор (якорь)[править | править код]
Минимальное число зубцов ротора, при котором самозапуск возможен из любого положения ротора — три. Из трёх, кажущихся явно выраженными, полюсов, на самом деле один полюс всё время находится в зоне коммутации, то есть ротор имеет минимум одну пару полюсов (как и статор, так как в противном случае работа двигателя невозможна).
Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание, в зависимости от угла поворота ротора, относительно статора. Применение большого числа (несколько десятков) катушек, необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, и для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его, в первом приближении, можно считать сплошным однородным цилиндром с моментом инерции, равным:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}},
где m{\displaystyle m} — масса цилиндра (ротора),
а R{\displaystyle R} — радиус цилиндра (ротора).
Коллектор[править | править код]
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции: является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
Рис. 4 Графитовые щёткиЩёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов.
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора недопустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Принципу работы электродвигателя постоянного тока может быть дано два описания:
- 1. подвижная рамка (два стержня с замкнутыми концами) с током в магнитном поле статора
или
- 2. взаимодействие магнитных полей статора и ротора.
Рамка с током, в однородном магнитном поле полюсов статора с индукцией B{\displaystyle B}, на два стержня рамки длиной L{\displaystyle L}, и с током I{\displaystyle I}, действует сила Ампера F{\displaystyle F}, постоянной величины, равные:
- F=B⋅I⋅L{\displaystyle F=B\cdot I\cdot L} и направленные в противоположные стороны.
Эти силы прикладываются к плечам p{\displaystyle p}, равным:
- p=r⋅sin(w⋅t){\displaystyle p=r\cdot \sin(w\cdot t)}, где r{\displaystyle r} — радиус рамки;
и создают крутящий момент Mk{\displaystyle M_{k}}, равный:
- Mk=F⋅p=B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}=F\cdot p=B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Для двух стержней рамки, суммарный крутящий момент равен:
- Mks=2⋅Mk=2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}s=2\cdot M_{k}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Практически (из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta }, между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко) четыре небольших части под кривой крутящего момента, равные:
- 2⋅B⋅I⋅L⋅r⋅∫0δ/2sin(w⋅t)d(w⋅t){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}\sin(w\cdot t)d(w\cdot t)}, где δ=β−α{\displaystyle \delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s{\displaystyle s}, крутящий момент будет равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Наибольший крутящий момент будет при угле поворота рамки равном: π/2{\displaystyle \pi /2}, то есть при угле 90°.
При этом угле поворота рамки с током, вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, то есть под углом 90°. При угле поворота ротора (рамки) равном 180°, крутящий момент равен нулю (из-за нулевого плеча), но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента, делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=(2⋅∫0πB⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
При s{\displaystyle s} витков в обмотке:
- Mkrsr=s⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=s\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Две рамки с током в однородном магнитном поле полюсов статора[править | править код]
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π/2{\displaystyle \pi /2}, то получится четырёхполюсный ротор.
Момент второй рамки:
- Mc=2⋅B⋅I⋅L⋅r⋅sin(ωt+π/2)=2⋅B⋅I⋅L⋅r⋅cos(ωt){\displaystyle M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(\omega t+\pi /2)=2\cdot B\cdot I\cdot L\cdot r\cdot \cos(\omega t)}.
Суммарный момент обеих рамок:
- Mk=Ms+Mc=2⋅B⋅I⋅L⋅r⋅(sin(ωt)+cos(ωt)){\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot (\sin(\omega t)+\cos(\omega t))}.
Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta } (в радианах) между пластинами коллектора (ламелями), восемь небольших частей под кривой крутящего момента, равных:
- 2⋅B⋅I⋅L⋅r∫0Δ/2sin(ωt)⋅d(ωt){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\int \limits _{0}^{\Delta /2}\sin(\omega t)\cdot d(\omega t)}, где Δ=β−α{\displaystyle \Delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора[править | править код]
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону:
- B=Bm⋅sin(ω⋅t){\displaystyle B=B_{m}\cdot \sin(\omega \cdot t)},
то крутящий момент для одного стержня будет равен:
- M=Bm⋅sin(ω⋅t)⋅I⋅L⋅r⋅sin(ω⋅t)=Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M=B_{m}\cdot \sin(\omega \cdot t)\cdot I\cdot L\cdot r\cdot \sin(\omega \cdot t)=B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для двух стержней:
- Ms=2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для рамки из s{\displaystyle s} витков:
- Mss=s⋅2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}s=s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}}.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные:
- s⋅2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(ω⋅t))2d(ω⋅t).{\displaystyle s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(\omega \cdot t))^{2}d(\omega \cdot t).}
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=2⋅∫0πBm⋅I⋅L⋅r⋅(sin(ω⋅t))2d(ω⋅t)/(2⋅π)=Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t)/π{\displaystyle Mkrsr=2\cdot \int \limits _{0}^{\pi }B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}d(\omega \cdot t)/(2\cdot \pi )=B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t)/\pi }.
При s{\displaystyle s} витках в обмотке:
- Mkrsr=(s⋅Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t))/π{\displaystyle Mkrsr=(s\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t))/\pi }.
Две рамки с током в неоднородном магнитном поле полюсов статора[править | править код]
Для второй (косинусной) рамки:
- sin(w⋅t+π/2)=cos(w⋅t){\displaystyle \sin(w\cdot t+\pi /2)=\cos(w\cdot t)};
крутящий момент от второй (косинусной) рамки будет равен:
- Mc=2⋅Bm⋅I⋅L⋅r⋅(cos(w⋅t))2{\displaystyle M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\cos(w\cdot t))^{2}},
суммарный крутящий момент от обеих рамок равен:
- Mk=Ms+Mc=2⋅Bm⋅I⋅L⋅r⋅((sin(w⋅t))2+(cos(w⋅t))2)=2⋅Bm⋅I⋅L⋅r{\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot ((\sin(w\cdot t))^{2}+(\cos(w\cdot t))^{2})=2\cdot B_{m}\cdot I\cdot L\cdot r},
то есть постоянен, и от угла поворота ротора не зависит.
Практически из-за наличия зазора восемь небольших частей, под кривой крутящего момента, равные:
- 2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(w⋅t))2d(w⋅t){\displaystyle 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(w\cdot t))^{2}d(w\cdot t)} каждая,
в соз
ru.wikipedia.org
Коллекторный двигатель постоянного тока: конструкция и принцип действия
Коллекторные электродвигатели довольно распространены в быту и на производстве. Они используются для привода различных механизмов, электроинструмента, в автомобилях. Отчасти популярность обусловлена простой регулировкой оборотов ротора, но есть и некоторые ограничения их применения и конечно же недостатки. Давайте разберемся что такое коллекторный двигатель постоянного тока (КДПТ), какие бывают разновидности данного вида электродвигателей и где они используются.
Определение и устройство
В справочниках и энциклопедиях приводят, такое определение:
«Коллекторным называется электродвигатель, у которого датчиком положения вала и переключателем обмоток является одно и то же устройство – коллектор. Такие двигатели могут работать либо только на постоянном токе, либо и на постоянном, и на переменном.»
Коллекторный электродвигатель, как и любой другой, состоит из ротора и статора. В этом случае ротор – является якорем. Напомним, что якорем называется та часть электрической машины, которая потребляет основной ток, и в которой индуцируется электродвижущая сила.

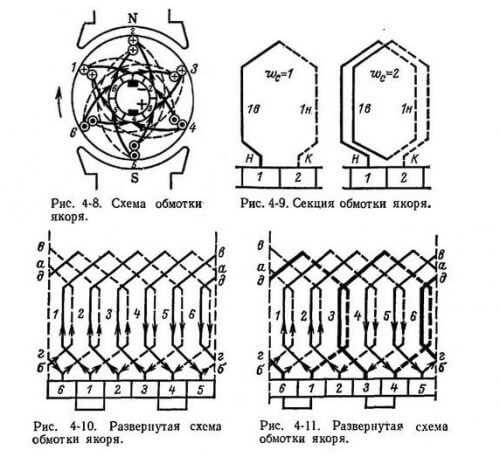
Для чего нужен и как устроен коллектор? Коллектор расположен на валу (роторе), и представляет собой набор продольно расположенных пластин, изолированных от вала и друг от друга. Их называют ламелями. К ламелям подключаются отводы секций обмоток якоря (устройство якорной обмотки КДПТ вы видите на группе рисунков ниже), а точнее к каждой из них подключен конец предыдущей и начало следующей секции обмотки.
Ток к обмоткам подаётся через щетки. Щётки образуют скользящий контакт и во время вращения вала соприкасаются то с одной, то с другой ламелью. Таким образом происходит переключение обмоток якоря, для этого и нужен коллектор.
Щеточный узел состоит из кронштейна с щеткодержателями, непосредственно в них и устанавливаются графитовые или металлографитовые щетки. Для обеспечения хорошего контакта щетки прижимаются к коллектору пружинами.
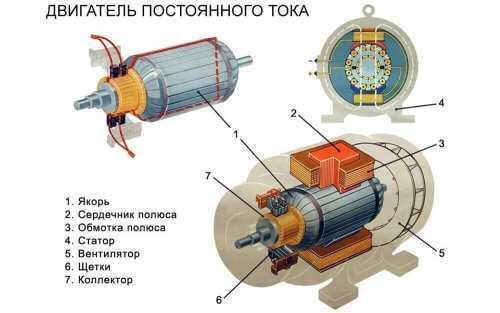
На статоре устанавливаются постоянные магниты или электромагниты (обмотка возбуждения), которые создают магнитное поле статора. В литературе по электрическим машинам вместо слова «статор» чаще используют термины «магнитная система» или «индуктор». На рисунке ниже изображена конструкция ДПТ в разных проекциях. Теперь же давайте разберемся как работает коллекторный двигатель постоянного тока!
Принцип действия
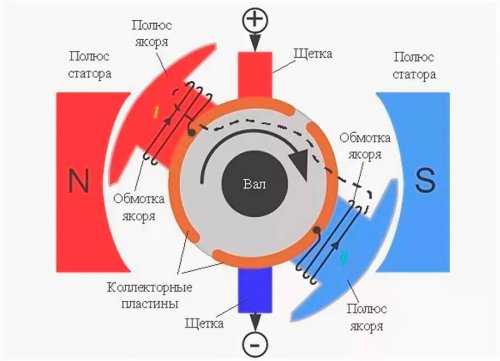
Когда ток протекает через обмотку якоря, возникает магнитное поле, направление которого можно определить с помощью правила буравчика. Постоянное магнитное поле статора взаимодействует с полем якоря, и он начинает вращаться благодаря тому, что одноименные полюса отталкиваются, притягиваясь к разноимённым. Что отлично иллюстрирует рисунок ниже.
При переходе щеток на другие ламели ток начинает протекать в обратную сторону (если рассматривать приведенный выше пример), магнитные полюса меняются местами и процесс повторяется.
В современных коллекторных машинах не используется двухполюсная конструкция из-за неравномерности вращения, в момент переключения направления тока силы, действующие на якорь, будут минимальны. А если включить двигатель, вал которого остановился в этом «переходном» положении — он может и не начать вращаться совсем. Поэтому на коллекторе современного двигателя постоянного тока расположено значительно больше полюсов и секций обмоток, уложенных в пазах шихтованного сердечника, таким образом достигаются оптимальные плавность движения и момент на валу.
Принцип работы коллекторного двигателя простым языком для чайников раскрыт в следующем видеоролике, убедительно рекомендуем ознакомиться.
Виды КДПТ и схемы соединения обмоток
По способу возбуждения коллекторные двигатели постоянного тока различают двух типов:
- С постоянными магнитами (маломощные двигатели мощностью десятки и сотни Ватт).
- С электромагнитами (мощные машины, например, на грузоподъёмных механизмах и станках).
Различают такие типы КДПТ по способу соединения обмоток:
- Последовательного возбуждения (в старой отечественной литературе и от старых электриков можно услышать название «Сериесные», от англ. Serial). Здесь обмотка возбуждения подключена последовательно с обмоткой якоря. Высокий пусковой момент – преимущество такой схемы, а её недостаток – падение частоты вращения с увеличением нагрузки на валу (мягкая механическая характеристика), и то что двигатель идёт вразнос (неконтролируемый рост оборотов с последующим повреждением опорных подшипников и якоря) если работают на холостом ходу или с нагрузкой на валу в меньше 20-30% от номинальной.
- Параллельного (также называют «шунтовые»). Соответственно обмотка возбуждения подключена параллельно обмотке якоря. На низких оборотах на валу высокий момент и стабилен в относительно широком диапазоне оборотов, а с увеличением оборотов он уменьшается. Преимущество — стабильные обороты в широком диапазоне нагрузки на валу (ограничивается его мощностью), а недостаток – при обрыве в цепи возбуждения может пойти вразнос.
- Назависимого. Обмотки возбуждения и якоря питаются от разных источников. Такое решение позволяет точнее регулировать обороты вала. Особенности работы похожи на ДПТ с параллельным возбуждением.
- Смешанного. Часть обмотки возбуждения подключена параллельно, а часть последовательно с якорем. Совмещают достоинства последовательного и параллельного типов.

Условное графическое обозначение на схеме вы видите ниже.
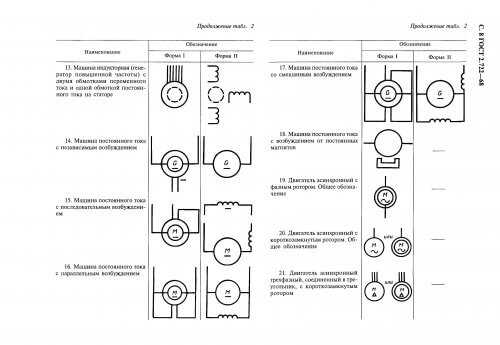
В иностранной и современной отечественной литературе, а также на схемах можно встретить и другое представление УГО для КДПТ, как было приведено на предыдущем рисунке в виде круга с двумя квадратами, где круг обозначает якорь, а два квадрата – щетки.
Схема подключения и реверс
Схема соединения обмоток статора и ротора определяется при изготовлении, и, в зависимости от того, где применяется конкретный двигатель, нужно выбирать соответствующее решение. В определенных режимах работы (тормозной режим, например) схемы включения обмоток могут изменяться или вводиться дополнительные элементы.
Включают маломощные коллекторные двигатели постоянного тока с помощью: полупроводниковых ключей (транзисторов), тумблеров или кнопок, специализированных микросхем-драйверов или с помощью маломощных реле. Крупные мощные машины подключаются к сети постоянного тока через двухполюсные контакторы.
Ниже вы видите реверсивную схему подключения двигателя постоянного тока к сети 220В. На практике, на производстве схема будет аналогичной, но диодного моста в ней не будет, поскольку все линии для подключения таких двигателей прокладываются от тяговых подстанций, где переменный ток выпрямляется.
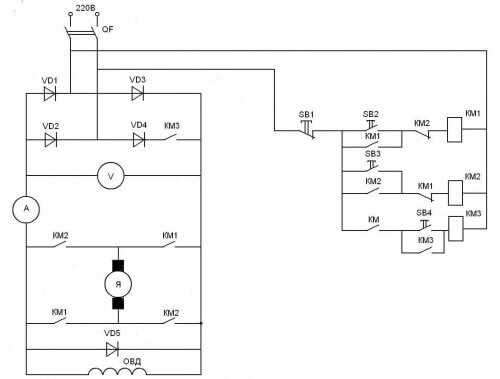
Реверс осуществляется путем смены полярности на обмотке возбуждения или на якоре. Изменить полярность и там, и там нельзя, поскольку направление вращения вала не изменится, как это происходит с универсальными коллекторными двигателями при работе на переменном токе.
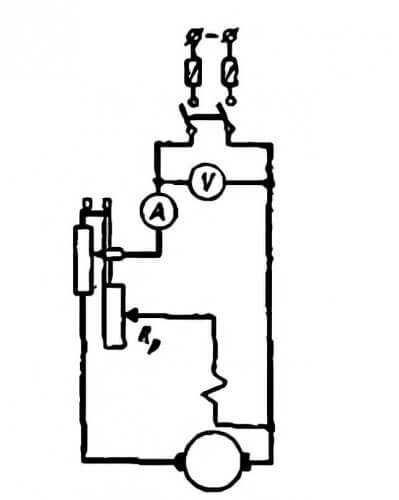
Для плавного пуска двигателя в цепь питания обмотки якоря или обмотки якоря и обмотки возбуждения (в зависимости от схемы их соединения) вводят регулировочное устройство, например, реостат, таким же образом регулируют и частоту вращения вала, но вместо реостата чаще используют набор постоянных резисторов, подключаемых с помощью набора контакторов.
В современных приложениях частота оборотов изменяется с помощью широтно-импульсной модуляции (ШИМ) и полупроводникового ключа, именно так это и сделано в аккумуляторном электроинструменте (шуруповёрт, например). КПД такого способа значительно выше.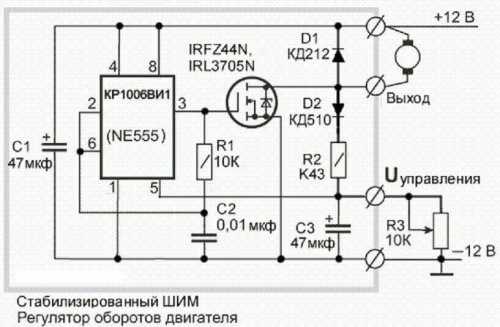
Сфера применения
Коллекторные двигатели постоянного тока применяются повсеместно как в быту, так и в промышленных устройствах и механизмах, давайте кратко рассмотрим их область применения:
- В автомобилях используют 12В и 24В коллекторные ДПТ для привода щеток стеклоочистителей (дворников), в стеклоподъёмниках, для запуска двигателя (стартер — это коллекторный двигатель постоянного тока последовательного или смешанного возбуждения) и приводах другого назначения.
- В грузоподъёмных механизмах (краны, лифты и пр.) используются КДПТ, которые работают от сети постоянного тока с напряжением 220В или любым другим доступным напряжением.
- В детских игрушках и радиоуправляемых моделях малой мощности используются КДПТ с трёхполюсным ротором и постоянными магнитами на статоре.
- В ручном аккумуляторном электроинструменте — разнообразные дрели, болгарки, электроотвертки и т.д.
Отметим, что в современный дорогой электроинструмент устанавливают не коллекторные, а бесколлекторные электродвигатели.
Достоинства и недостатки
Разберем плюсы и минусы коллекторного двигателя постоянного тока. Преимущества:
- Соотношение размеров к мощности (массогабаритные показатели).
- Простота регулировки оборотов и реализации плавного пуска.
- Пусковой момент.
Недостатки у КДПТ следующие:
- Износ щеток. Высоконагруженные двигатели, которые регулярно эксплуатируются, требуют регулярного осмотра, замены щеток и обслуживания коллекторного узла.
- Коллектор изнашивается из-за трения щеток.
- Возможно искрение щеток, что ограничивает применение в опасных местах (тогда используют КДПТ взрывозащищенного исполнения).
- Из-за постоянного переключения обмоток этот тип двигателей постоянного тока вносит помехи и искажения в питающие цепи или электросеть, что приводит к сбоям и проблемам в работе других элементов схемы (особенно актуально для электронных схем).
- У ДПТ на постоянных магнитах магнитные силы со временем ослабевают (размагничиваются) и эффективность двигателя снижается.
Вот мы и рассмотрели, что такое коллекторный двигатель постоянного тока, как он устроен и какой у него принцип действия. Если остались вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
samelectrik.ru
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…
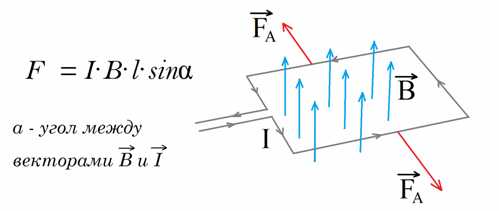
Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.
Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
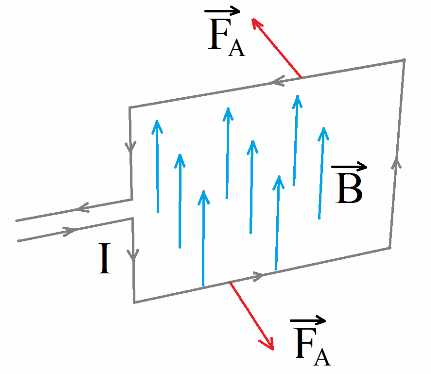
Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
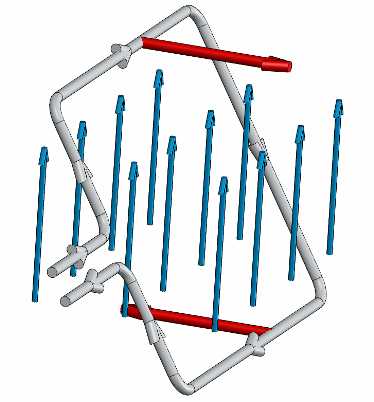
Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.

Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
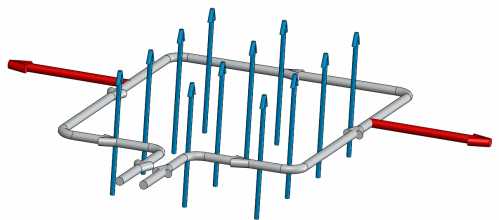
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.

Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.
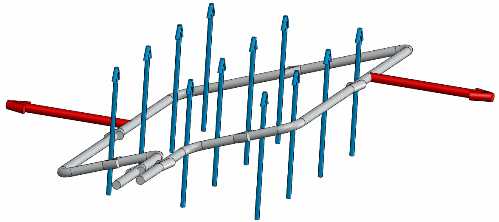
Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
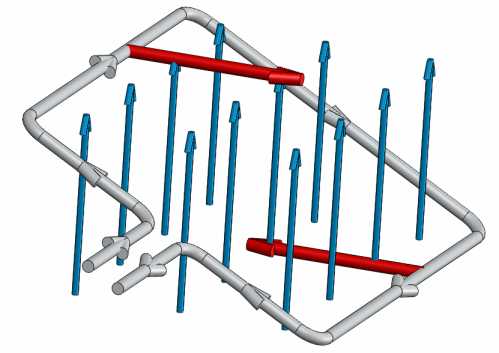
Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:

Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.

Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.
Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.

Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
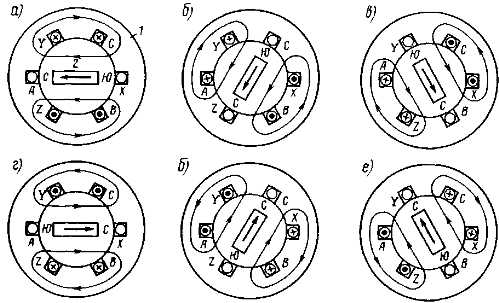
Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
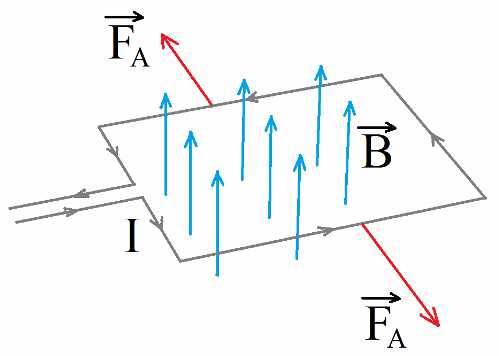
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
powercoup.by