Проектор на лобовое стекло HUD
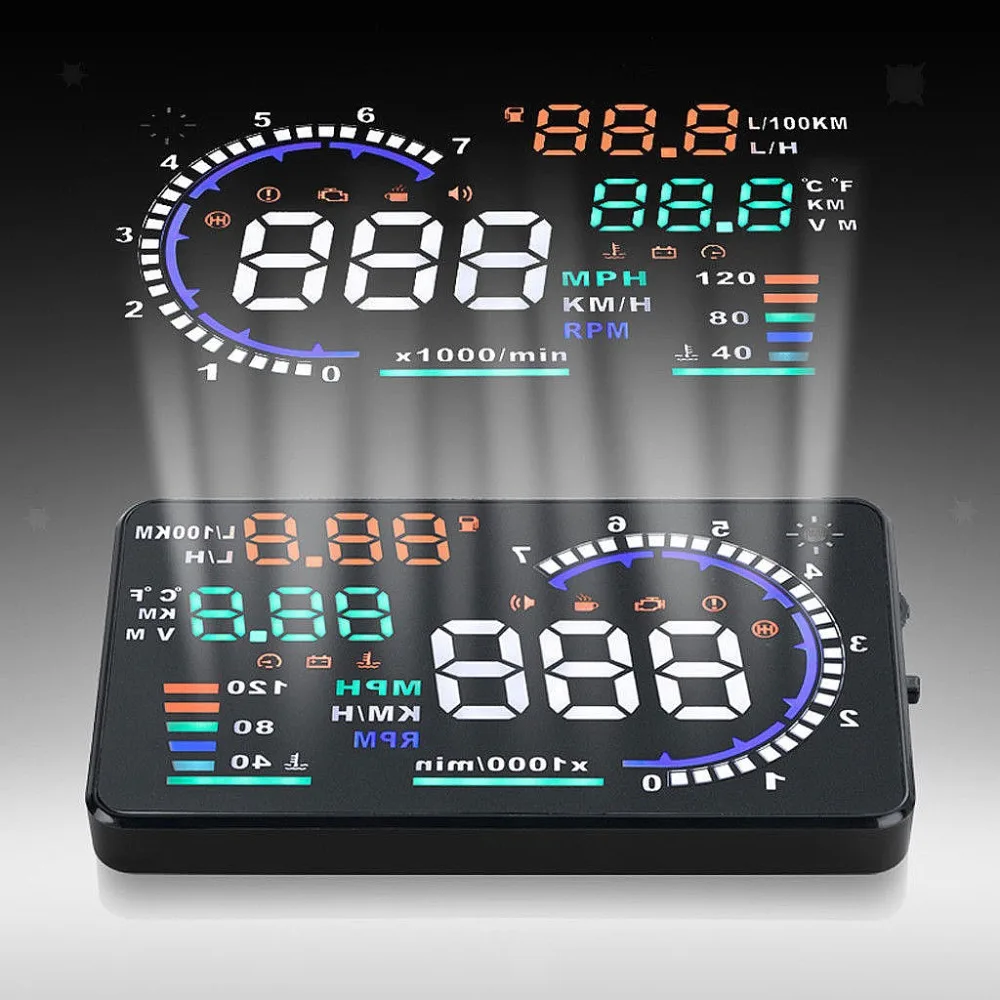
HUD* — аббревиатура расшифровывается как — «Head-Up Display«, что в свою очередь с английского переводится как — «дисплей поднятой головы«. В России данное устройство получило название «Проектор на лобовое стекло«. Это специальная система автомобиля позволяющая проецировать данные (в зависимости от модели это может быть скорость, обороты двигателя, вольтаж в системе и т.д.) прямо перед водителем, непосредственно на лобовое стекло.
Впервые подобные системы появились в военном авиастроении. Различные показатели проецировались прямо на стекло шлема пилота самолета-истребителя. За несколько десятых секунды, которые необходимы, чтобы перевести взгляд на приборную панель и обратно, сверхскоростные истребители пролетали сотни метров. И все это расстояние самолет проходил практически «в слепую». Что очень сильно влияло на безопасность полётов.
Автомобильная промышленность всегда брала лучшее из других областей и проекторы на лобовое стекло не стали исключением.
Ранее насладиться подобным устройством в действии, помимо летчиков-истребителей, могли владельцы Corvette Z06, Citroen C6, BMW 5-ой и 6-ой серии. Но сейчас индустрия автомобильного тюнинга шагнула вперед и на рынке появились портативные HUD проекторы подходящие практически любой модели автомобиля.
HUD — проектор на лобовое стекло представляет собой светодиодный дисплей высокой яркости который располагается над приборной панелью автомобиля и проецирует показания приборов (скорость, обороты двигателя, вольтаж в системе, температуру охлаждающего контура — количество и характер отображаемых параметров зависит лишь от модели проектора) на лобовое стекло прямо перед водителем. Прибор подключается к бортовой системе автомобиля и снимает показания со штатных приборов.
 А это значит, что вы всегда успеете затормозить перед резко остановившимся автомобилем или выскочившим на дорогу пешеходом, всегда заметите дорожные знаки. Огромным преимуществом подобных устройств является возможность звуковой или цветовой сигнализации. Как только одна из величин, отображаемых на лобовом стекле, превысит допустимые нормы — вы увидите или услышите специальный сигнал системы.
А это значит, что вы всегда успеете затормозить перед резко остановившимся автомобилем или выскочившим на дорогу пешеходом, всегда заметите дорожные знаки. Огромным преимуществом подобных устройств является возможность звуковой или цветовой сигнализации. Как только одна из величин, отображаемых на лобовом стекле, превысит допустимые нормы — вы увидите или услышите специальный сигнал системы.Вы можете больше не волноваться о показании приборов — система проецирования на лобовое стекло позаботится об этом за вас. А вам лишь остается наслаждаться процессом вождения!
Разве вы никогда не хотели сидеть за рулём собственного автомобиля с гордо поднятой головой?
Выводимые показател дисплея:
- Точные показания числа оборотов двигателя.
- Предупреждение о повышенной температуре двигателя и превышении скорости (4 уровня предупреждений).
-
Показания мгновенного расхода топлива и напряжение АКБ.

- Автовключение при запуске двигателя, автовыключение с задержкой при выключении двигателя.
- Автоматическая регулировка яркости день/ночь.
- Индикатор «зуммера»: вкл/выкл (регулируется кнопкой).

Подробнее о дополнительных настройках меню:
- Настройка «напоминания» оборотов двигателя для переключения КПП.
- Настройка верхнего лимита оборотов двигателя (после которого предупреждения о необходимости переключения передачи не должны появляться).
- Настройка времени задержки отключения после выключения зажигания (сек.).
- Настройка предупреждение превышения уровня скорости (км/ч).
- Настройка предупреждения уровня температуры двигателя (град. С).
- Настройка коэффициента расхода топлива.
- Настройка предупреждения об уровне заряда АКБ (В).
Комплектация:
x1 универсальный HUD дисплей iFound Gen. 1 на базе OBDII.
1 на базе OBDII.
x1 OBD кабель.
x1 Отражающая пленка.
x1 Противоскользящий коврик.
x1 Инструкция Анг.
Установка:
- Находим разъем OBD и вставляем штекер.
- Проводку прокладываем за уплотнитель обшивки или как вам будет удобно.
- Выставляем удобное положение проектора.
- Очищаем стекло от пыли и оставляем его мокрым.
- Удаляем защитную пленку с поверхность светоотражающей пленки и прикладываем на с моченую поверхность стекла.
- Удаляем пузырьки (можно с помощь пластиковой карты).
- Ждем 5 мин. и удаляем остатки влаги.
- Удаляем внешнюю защитную пленку.
- Включаем зажигание и все готово.
Категории товара
Проектор на лобовое стекло автомобиля Rivotek HUD 100
Rivotek HUD 100 — полноценный мультимедийный проектор
видеоизображения на лобовое стекло автомобиля с набором кабелей для подключения
к смартфонам.
Rivotek HUD 100 это первый мультимедийный проектор видеоизображения на лобовое стекло автомобиля с высоким разрешением. Проекционный дисплей может передавать изображение с экранов смартфонов, встроенных автомобильных 2 DIN устройств, видеорегистраторов или от любых других устройств имеющих композитный, HDMI или RCA видеовыход. Изображение будет расположено перед глазами водителя на лобовом стекле. Водитель может иметь перед глазами важную информацию (скорость, дорожную обстановку, диагностические данные OBDII, входящие вызовы или навигационные подсказки) не отводя взгляда от дороги, что обеспечит безопасность вождения.
ПОДКЛЮЧЕНИЕ К СМАТФОНАМ
Для подключения к проектору смартфон
должен обладать MHL функционалом или иметь HDMI выход. Набор кабелей в
комплекте подобран для подключения к самым распространенным смартфонам HTC,
SUMSUNG и APPLE. Если у Вас другой телефон, то возможно понадобится
дополнительный переходник.
Для подключения к телефонам iPhone 4s и iPhone 5 требуется приобрести дополнительно мультимедийный HDMI кабель – переходник. ( iPhone 4s – MD098/MC953; iPhone 5 – MD826ZM/A)
Имеются следующие бесплатные и платные приложения которые можно использовать вместе с проектором: Apple — Awesome HUD ; Android — Ulysee Speedmeter, HUDY, OBDII TPMS, Simple Car Mode.
УСТАНОВКА Rivotek HUD 100
Устройство устанавливается на клейкой подставке на торпеду впереди водителя, позволяющей настроить нужный угол отображения информации
Для отсутствия задвоения картинки при отражении от внутренней и внешней поверхности лобового стекла автомобиля требуется установка прозрачного отражающего экрана или полупрозрачной пленки ( 2 шт. идут в комплекте).
Для отсутствия задвоения картинки при отражении от внутренней и внешней поверхности лобового стекла автомобиля требуется установка прозрачного отражающего экрана или полупрозрачной пленки ( 2 шт. идут в комплекте).
идут в комплекте).
УПРАВЛЕНИЕ ПРОЕКТОРОМ
Проектор очень прост в управлении. У него имеются кнопки регулировки громкости звука и яркости экрана.
Внимательно ознакомьтесь с правилами безопасности перед установкой и использованием в автомобиле.
ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ И СВЕДЕНИЯ ОБ ИЗДЕЛИИ
ВАЖНО!
Не устанавливайте проектор прямо
перед глазами, он не должен перекрывать зоны обзора важные при вождении
автомобиля. Рекомендуется устанавливать проектор справа или слева от
основной зоны обзора водителя так что бы он не мешал визуальной оценки дорожной
обстановки при вождении.
Яркость проектора меняется автоматически, а также вручную. Не настраивайте
яркость и громкость во время движения. Не пытайтесь подключить или
разъединить провода во время движения. В случае необходимости настройки прибора
рекомендуется вынуть провод питания проектора из гнезда прикуривателя и
продолжить настройки в месте безопасной парковки.
Закрепляйте провода проектора на торпеде с помощью специальных
креплений имеющихся в комплекте чтобы провода не мешали управлению
автомобилем. Предпочтительно проложить провода под передней панелью автомобиля,
воспользовавшись услугами профессионалов.
При отображении карт с навигационных программ на смартфоне
используйте ночной режим для получения темного — более прозрачного для
глаза водителя, фона карты. Рекомендуется использовать программы специально
написанные для проектора ( HUD ), использующие темный фон экрана.
Использование полупрозрачной пленки дает лучшую четкость изображения в солнечную погоду. При некоторых углах падения света на полупрозрачную пленку или зону ее установки возможно ухудшение изображения.
Производитель и дистрибьютор продукции не несут ответственность за безопасность
вождения автомобиля при применении полупрозрачной пленки. Водитель
принимает решение об использовании полупрозрачной пленки и месте ее установки
самостоятельно, самостоятельно несет ответственность, если установка
проектора или его эксплуатация повлияла на безопасность вождения.
Водитель
принимает решение об использовании полупрозрачной пленки и месте ее установки
самостоятельно, самостоятельно несет ответственность, если установка
проектора или его эксплуатация повлияла на безопасность вождения.
Проектор работает с смартфонами поддерживающими стандарт видеосигнала MHL. Подробную информацию можно найти на сайте MHL консорциума. http://www.mhlconsortium.org/productlist/mobile-devices/ Для подключения к автомобильному проектору видеосигнал MHL со смартфона конвертируется в HDMI c помощью кабелей и/или переходников как входящих в комплект автомобильного проектора Rivotek HUD 100 так и покупаемых отдельно (для iPhone). Производитель автомобильного проектора проводил тесты со следующими телефонами:
1. Samsung (с кабелем MHL и переходником из комплекта )
Galaxy S2/ S3/S4
Galaxy Note2
HTC (с кабелем MHL из комплекта )
Sensation
EVO
Butterfly 1
One
Sony (с кабелем MHL из комплекта )
Xperia Z1
LG (с кабелем MHL из комплекта )
Optimus LTE II
Apple ( с A/V адаптером Apple, не входящим в комплект)
iPhone 4S/5S
ЧТО В КОМПЛЕКТЕ?
ПАРАМЕТРЫ:
|
Размеры: |
189 x 110 x 74 |
|
Вес: |
388 (без основания системного блока) 845г полный комплект |
|
Рабочая температура: |
-10С до + 60С |
|
Автоматический датчик освещенности: |
Ручная регулировка освещенности 16 уровней (0-15) / Автоматическая регулировка освещенности 4 уровня (0, 6, 11, 15 ) |
|
Набор кабелей для подключения к смартфонам в комплекте: |
Да |
|
Дисплей: |
Полноцветный 5″ (визуальное изображение). |
|
Интерфейс: |
miniHDMI, RCA, miniUSB |
|
Аудио-выход: |
1 х 1Вт |
|
Дополнительно: |
Совместим: смартфонами с функциями вывода ТВ (практически все), автомобильными системами 2-DIN, устройствами ODB-II Bluetooth, камера бокового обзора, камерами заднего вида, MP3-плееры, ПК с тд. с любыми устройствами с выводами HDMI/CVBS |
 Разрешение 400 x
240. Яркость 3000 cd/m2 (максимум)
Разрешение 400 x
240. Яркость 3000 cd/m2 (максимум)Что представляет собой HUD проектор на лобовое стекло? — Рамблер/авто
HUD Проектор на лобовое стекло является одним из новых устройств, призванных повысить уровень безопасности и комфорта для водителей автомобилей.
1 Что представляет собой проектор на лобовое стекло?
Для того чтобы помочь водителю автомобиля сосредоточиться на дороге и не отвлекаться на приборную панель, был изобретен HUD-проектор на лобовое стекло (Head Up Display) — специальная система в автомобиле, которая позволяет проецировать различного рода данные прямо на лобовое стекло автомобиля (скорость, количество оборотов и т. д). Такие системы позволяют удобно следить за важными показателями, не отрывая своего взгляда от дороги.
д). Такие системы позволяют удобно следить за важными показателями, не отрывая своего взгляда от дороги.
Устанавливается проектор на лобовое стекло прямо на приборную панель автомобиля. Благодаря портативности каждый водитель может расположить агрегат в самом комфортном для себя месте. Яркость световой индикации можно изменить в настройках. В комплекте, как правило, есть специальная темная пленка, которая клеится на стекло автомобиля, чтобы данные с датчика были четко различимы во время езды днем. Во избежание соскальзывания элемента в комплекте присутствует специальный коврик или крепления для фиксации на панели автомобиля.
Проектор на лобовое стеклоРекомендуем к прочтению:
Подсветка салона автомобиля – делаем машину ярче
Электротонировка стекол – смарт-технологии для авто
Полная покраска автомобиля – как вернуть машине блеск?
Тонировка стекол авто – чтобы ездить с комфортом!
Покраска автомобиля своими руками – секреты мастеров
Проектор на лобовое стекло обладает еще одной весьма полезной способностью — он может извещать водителя звуковым сигналом о превышении скорости (порог активации можно изменить в настройках, как и продолжительность звукового сигнала). Некоторые устройства способны сигнализировать и в других случаях, например, при повышении температуры двигателя автомобиля.
Некоторые устройства способны сигнализировать и в других случаях, например, при повышении температуры двигателя автомобиля.
Наличие такого механизма может существенно повысить внимательность водителя на дороге и снизить риск возникновения ДТП.
Однако не стоит думать: «Куплю себе проектор скорости на лобовое стекло и сразу стану водить лучше». На дороге всегда нужно быть внимательными.
2 Чем отличаются?
Существует множество фирм-производителей подобных устройств. Они могут отличаться по следующим основным признакам:
количество отображаемой информации;
дизайн и количество проецируемых данных;
способ подключения.
Некоторые приборы проецируют лишь спидометр (они так и называются — проектор спидометра или проектор скорости на лобовое стекло). Другой вариант вдобавок может информировать водителя о количестве оборотов двигателя, степени заряда аккумулятора, температуре двигателя, данных парктроника и даже о давлении в шинах. Подобные датчики с функцией отображения количества оборотов в цифрах могли бы быть полезными для начинающих курсантов автошкол.
Показания протектора
Помимо простых цифр для обозначения скорости производители добавляют на дисплей всевозможную дополнительную информацию, например, время, схема автомобиля и шкала тахометра. Очень удобно.
Способов подключения несколько. Это может быть проектор на лобовое стекло, который даже не нужно никуда подключать в автомобиле (функционирует через данные GPS). Либо это девайс, подключаемый к универсальному порту ODB-II (On-Doard Diagnostic), но нужно уточнять, подходит ли данная модель к определенной марке автомобиля. Имеются даже варианты подключения через привычный разъем автомобильного прикуривателя.
3 Проектор на лобовое стекло: интересные факты
Впервые идея продублировать показатели ряда пилотажно-навигационных приборов пришла в головы людей из конструкторских бюро США и СССР в начале 60-х гг. Занимались эти бюро проектированием авиационного оборудования для военной авиации.
Данные проецировались на специальное ударопрочное стекло над приборными панелями. Сделано это было для того, чтобы пилот не отвлекался на контроль параметров при выполнении задачи. Дублировалась следующая информация: скорость, высота, вертикальная скорость, крен и тангаж, курс, прицельная информация.
Сделано это было для того, чтобы пилот не отвлекался на контроль параметров при выполнении задачи. Дублировалась следующая информация: скорость, высота, вертикальная скорость, крен и тангаж, курс, прицельная информация.
Проецирование данных на специальное ударопрочное стеклоТак как информация проецировалась на переднее стекло, в русскоязычной технической терминологии прижился термин ИЛС (индикатор лобового стекла). Отсюда и была взята мысль создать автомобильный проектор на лобовое стекло.
В некоторых моделях автомобилей прибор устанавливается прямиком с завода. Такие устройства встроены в автомобили BMW 5 и 6 серий, Citroen C6, Corvette Z06.
Цветное изображение, которое проецирует проектор на лобовое стекло, появилось лишь в 2001 году, до этого оно было монохромным.
Путем несложных вычислений определено, что брошенный на приборную панель взгляд при езде со скоростью 60 км/ч стоит водителю 16 м участка дороги за каждую секунду. Исходя из этих данных можно считать проектор на лобовое стекло очень полезным изобретением.
Появился прибор, выводящий навигацию на лобовое стекло автомобиля — Российская газета
Небольшая ИT-компания из Ижевска выпустила прибор и приложение, позволяющие проецировать данные о скорости движения автомобиля и маршрут на лобовое стекло. Благодаря Hudway Glass водителю не приходится отрывать взгляд от дороги и отвлекаться, чтобы посмотреть на спидометр.
Прототип технологии — прицельный отражатель — был известен еще до Второй мировой войны и использовался для облегчения навигации в британских военных истребителях. В гражданское машиностроение технология перекочевала много позже, в 90-е годы прошлого века, впервые появившись в качестве стационарной системы в автомобилях класса люкс.
Усовершенствованная модель не только проецирует на стекло карты, но и позволяет голосом или жестами управлять телефоном
Двадцать лет спустя технологию смогли сделать доступной каждому автолюбителю два начинающих предпринимателя — Иван Клабуков и Алексей Останин. Идея проекта родилась случайно: ночью в машине экран брошенного на приборную панель телефона отразился в лобовом стекле. Загруженная на экране карта оказалась прямо перед глазами водителя. Останин, занимавшийся раллийными гонками, понял: именно такой технологии ему и не хватало, чтобы, ведя машину по незнакомой местности, не отвлекаться от дороги.
Загруженная на экране карта оказалась прямо перед глазами водителя. Останин, занимавшийся раллийными гонками, понял: именно такой технологии ему и не хватало, чтобы, ведя машину по незнакомой местности, не отвлекаться от дороги.
Сначала разработчики написали приложение, которое собирало данные о скорости движения автомобиля и могло отображать карты. По первоначальной задумке телефон с включенной программой следовало просто класть на приборную панель и смотреть на его отражение в лобовом стекле. Но даже аппараты с самыми яркими экранами не могли создать четкой картинки днем или в сумерках. Тогда в дополнение к софту предприниматели создали прибор, который помог бы сделать изображение более резким и контрастным.
— Само устройство — это держатель телефона на панели авто с дополнительной функцией проекции картинки на лобовое стекло. Вы кладете телефон в держатель экраном вверх и видите отражение экрана на специальном прозрачном стекле, которое вертикально расположено над телефоном. В темноте кажется, что картинка просто висит в воздухе, — рассказал «РГ» Иван Клабуков.
В темноте кажется, что картинка просто висит в воздухе, — рассказал «РГ» Иван Клабуков.
Усовершенствованная модель прибора Hudway Cast не только проецирует на стекло карты, но и позволяет голосом или жестами управлять телефоном — отвечать на звонки и сообщения, переключать музыку. В систему можно интегрировать и камеру ночного видения, тогда на экране будет выводиться контрастное изображение ночной дороги. Сейчас оба прибора пользуются спросом по всем миру, первый продается в 97 странах, второй — в 24.
% PDF-1.4
%
1014 0 объект
>
эндобдж
xref
1014 107
0000000016 00000 н.
0000004760 00000 н.
0000004955 00000 н.
0000004992 00000 н.
0000006200 00000 н.
0000006355 00000 п.
0000006496 00000 н.
0000006654 00000 н.
0000006810 00000 н.
0000006966 00000 н.
0000007124 00000 н.
0000007280 00000 н.
0000007436 00000 н.
0000007592 00000 н.
0000007748 00000 н.
0000007904 00000 н.
0000008060 00000 н.
0000008216 00000 н.
0000008372 00000 н.
0000008527 00000 н. 0000008683 00000 н.
0000008818 00000 н.
0000008958 00000 н.
0000009337 00000 н.
0000009743 00000 н.
0000009809 00000 н.
0000009922 00000 н.
0000010037 00000 п.
0000010066 00000 п.
0000010808 00000 п.
0000010837 00000 п.
0000011389 00000 п.
0000011646 00000 п.
0000012915 00000 п.
0000014014 00000 п.
0000014649 00000 п.
0000015181 00000 п.
0000015269 00000 п.
0000015839 00000 п.
0000017230 00000 п.
0000017419 00000 п.
0000017690 00000 п.
0000017995 00000 п.
0000019313 00000 п.
0000019692 00000 п.
0000021207 00000 п.
0000022632 00000 п.
0000023393 00000 п.
0000024066 00000 п.
0000024220 00000 п.
0000039862 00000 н.
0000040132 00000 п.
0000062121 00000 п.
0000062270 00000 п.
0000069699 00000 п.
0000069851 00000 п.
0000070333 00000 п.
0000070485 00000 п.
0000070757 00000 п.
0000071029 00000 п.
0000092705 00000 п.
0000092792 00000 п.
0000092924 00000 п.
0000093011 00000 п.
0000093082 00000 п.
0000093160 00000 п.
0000093918 00000 п.
0000094056 00000 п.
0000008683 00000 н.
0000008818 00000 н.
0000008958 00000 н.
0000009337 00000 н.
0000009743 00000 н.
0000009809 00000 н.
0000009922 00000 н.
0000010037 00000 п.
0000010066 00000 п.
0000010808 00000 п.
0000010837 00000 п.
0000011389 00000 п.
0000011646 00000 п.
0000012915 00000 п.
0000014014 00000 п.
0000014649 00000 п.
0000015181 00000 п.
0000015269 00000 п.
0000015839 00000 п.
0000017230 00000 п.
0000017419 00000 п.
0000017690 00000 п.
0000017995 00000 п.
0000019313 00000 п.
0000019692 00000 п.
0000021207 00000 п.
0000022632 00000 п.
0000023393 00000 п.
0000024066 00000 п.
0000024220 00000 п.
0000039862 00000 н.
0000040132 00000 п.
0000062121 00000 п.
0000062270 00000 п.
0000069699 00000 п.
0000069851 00000 п.
0000070333 00000 п.
0000070485 00000 п.
0000070757 00000 п.
0000071029 00000 п.
0000092705 00000 п.
0000092792 00000 п.
0000092924 00000 п.
0000093011 00000 п.
0000093082 00000 п.
0000093160 00000 п.
0000093918 00000 п.
0000094056 00000 п. 0000094322 00000 п.
0000094405 00000 п.
0000123917 00000 н.
0000124001 00000 н.
0000124153 00000 н.
0000124237 00000 н.
0000124308 00000 н.
0000124391 00000 н.
0000124622 00000 н.
0000124706 00000 н.
0000124763 00000 н.
0000126284 00000 н.
0000126581 00000 н.
0000126929 00000 н.
0000127340 00000 н.
0000127738 00000 н.
0000128111 00000 н.
0000128504 00000 н.
0000130437 00000 п.
0000132370 00000 н.
0000138560 00000 н.
0000144514 00000 н.
0000145171 00000 н.
0000145516 00000 н.
0000145877 00000 н.
0000168245 00000 н.
0000168496 00000 н.
0000168904 00000 н.
0000169308 00000 н.
0000169921 00000 н.
0000170827 00000 н.
0000171926 00000 н.
0000173624 00000 н.
0000175322 00000 н.
0000179583 00000 н.
0000185783 00000 н.
0000185853 00000 н.
0000004562 00000 н.
0000002485 00000 н.
трейлер
] / Назад 4049560 / XRefStm 4562 >>
startxref
0
%% EOF
1120 0 объект
> поток
h ެ U {XSNNH5kJ $ (A \ * «Xi ((V9 $ 8 @ cR ܢ DTu1b)} ϓ
0000094322 00000 п.
0000094405 00000 п.
0000123917 00000 н.
0000124001 00000 н.
0000124153 00000 н.
0000124237 00000 н.
0000124308 00000 н.
0000124391 00000 н.
0000124622 00000 н.
0000124706 00000 н.
0000124763 00000 н.
0000126284 00000 н.
0000126581 00000 н.
0000126929 00000 н.
0000127340 00000 н.
0000127738 00000 н.
0000128111 00000 н.
0000128504 00000 н.
0000130437 00000 п.
0000132370 00000 н.
0000138560 00000 н.
0000144514 00000 н.
0000145171 00000 н.
0000145516 00000 н.
0000145877 00000 н.
0000168245 00000 н.
0000168496 00000 н.
0000168904 00000 н.
0000169308 00000 н.
0000169921 00000 н.
0000170827 00000 н.
0000171926 00000 н.
0000173624 00000 н.
0000175322 00000 н.
0000179583 00000 н.
0000185783 00000 н.
0000185853 00000 н.
0000004562 00000 н.
0000002485 00000 н.
трейлер
] / Назад 4049560 / XRefStm 4562 >>
startxref
0
%% EOF
1120 0 объект
> поток
h ެ U {XSNNH5kJ $ (A \ * «Xi ((V9 $ 8 @ cR ܢ DTu1b)} ϓ
🔔 ПЕРЕДНЯЯ ПРОЕКЦИЯ за 80 долларов: Техника пленки, которую Кубрик использовал дома в 2001 году — Blog Photography Tips
 youtube.com/embed/Kqq63CSGMXY?rel=0″/>
youtube.com/embed/Kqq63CSGMXY?rel=0″/> ЧТО ТАКОЕ ТЕХНИКА ПЕРЕДНЕЙ ПРОЕКЦИИ В ФИЛЬМЕ?
Эффект фронтальной проекции — это процесс визуальных эффектов в камере при производстве фильмов, позволяющий объединить исполнение переднего плана с предварительно отснятым фоном.В отличие от обратной проекции, при которой отснятый материал проецируется на экран сзади исполнителей, передняя проекция проецирует предварительно отснятый материал над исполнителями на высоко отражающую поверхность фона. Тот же метод использовался Стэнли Кубриком в 2001 году или совсем недавно в фильме «Обливион», в котором также снимался Круз, — широко использовалась фронтальная проекция для отображения различных фонов неба в домашней обстановке.
БОЛЬШИЕ ЗАДНИЕ ПРОЕКТОРЫ
«Для Oblivion у нас был экран шириной 500 футов и высотой 42 фута с 21 проекторы.
 Это дало нам возможность проецировать вперед 15К кинофильмов в реальном времени ». — объясняет Клаудио Миранда на сайте www.fdtimes.com-
Это дало нам возможность проецировать вперед 15К кинофильмов в реальном времени ». — объясняет Клаудио Миранда на сайте www.fdtimes.com-КАК РАБОТАЕТ ФРОНТАЛЬНАЯ ПРОЕКЦИЯ:
Хотя в наши дни эта техника не используется широко, где преобладает цветовой фон, она позволяет нам записывать сцену без постобработки в другое время и в другом месте.
Помните, что для правильного просмотра сцены изображение проецируется на экран в обратном направлении.
ЭТОТ ПРОЕКТОРНЫЙ ТРЮК ЗА 80 $ ДЕЛАЕТ НЕВЕРОЯТНЫЕ ФИЛЬМЫ
Как проектор за 80 долларов может улучшить процесс бедняков? Как кинематографисты могут научиться использовать те же приемы фронтальной проекции, которые использовались в «Первом человеке» (2018 г. ), «Гравитации» (2013 г.) и «Обливионе» (2013 г.)?
), «Гравитации» (2013 г.) и «Обливионе» (2013 г.)?
Чтобы выяснить это, мы поговорили с Чарльзом Хейном, профессором кинематографии в Высшей школе кино им. Файрстайна и писателем из школы NoFilmSchool.
Каждый режиссер в какой-то момент своей карьеры снимал сцену в машине. Будь то технологический трейлер в крупнобюджетном производстве или очень небезопасный и неразумный метод съемки реально движущегося транспортного средства, автомобильные сцены — обычное дело в современном кинопроизводстве.
В этом эпизоде Indy Mogul показывает, как использование фронтальной проекции может мгновенно улучшить работу вашего бедняги и улучшить кинематографическое качество ваших автомобильных сцен. Они сочетают в себе простые методы освещения с дешевым проектором, который мы купили в Best Buy, для получения потрясающих результатов.
ЗАДНИЙ ВЫПУСК С МИНИАТЮРАМИ
Использование миниатюр и обратной проекции для создания атмосферы пещеры, разрушающейся вокруг героя боевиков.
Вам также может понравиться: Как построить лучший проектор для смартфона
Текст из википедии | Видео Джои Шанкс, LATimesTrailers, Fandor и Indy Mogul
границ | Антариум: устройство реконструированной визуальной реальности для навигационных исследований муравьев
Введение
Обширные экспериментальные данные теперь дают нам уверенность в том, что насекомые-кормилицы, обитающие в центральных местах, такие как муравьи, пчелы и осы, перемещаются преимущественно визуально, полагаясь как на воспоминания о сценах, так и на информацию о небесном компасе (например.г., Reid et al., 2011; Цайль, 2012; Коллетт и др., 2013; Wystrach et al., 2014; Грэхем и Филиппидес, 2017; Венер, 2020). Визуальная навигация поддерживается интеграцией путей (Heinze et al., 2018), которая работает в фоновом режиме, обеспечивая отказоустойчивость, а в некоторых случаях и ситуациях также с помощью обонятельных, тактильных и магнитных сигналов (Buehlmann et al. , 2012, 2015; Knaden, Graham, 2016; Fleischmann et al., 2018). Данные поведенческих исследований и все более подробные знания о нейронных цепях, имеющих значение для навигации (например,г., Stone et al., 2017; Бюльманн и др., 2020; Камхи и др., 2020; Steinbeck et al., 2020) начинают использоваться в нейронно-ограниченных и экспериментально информированных моделях навигации (например, Baddeley et al., 2012; Ardin et al., 2016; Webb and Wystrach, 2016; Stone et al., 2017; Hoinville, Wehner, 2018; Gkanias et al., 2019; Schulte et al., 2019; Differt and Stürzl, 2020; Sun et al., 2020) и в роботизированные реализации (например, Lambrinos et al., 2000; Möller, 2000 ; Stone et al., 2016, 2017; Webb, Wystrach, 2016; Sabo et al., 2017; Dupeyroux et al., 2018).
, 2012, 2015; Knaden, Graham, 2016; Fleischmann et al., 2018). Данные поведенческих исследований и все более подробные знания о нейронных цепях, имеющих значение для навигации (например,г., Stone et al., 2017; Бюльманн и др., 2020; Камхи и др., 2020; Steinbeck et al., 2020) начинают использоваться в нейронно-ограниченных и экспериментально информированных моделях навигации (например, Baddeley et al., 2012; Ardin et al., 2016; Webb and Wystrach, 2016; Stone et al., 2017; Hoinville, Wehner, 2018; Gkanias et al., 2019; Schulte et al., 2019; Differt and Stürzl, 2020; Sun et al., 2020) и в роботизированные реализации (например, Lambrinos et al., 2000; Möller, 2000 ; Stone et al., 2016, 2017; Webb, Wystrach, 2016; Sabo et al., 2017; Dupeyroux et al., 2018).
Предсказания этих моделей, вероятно, будет все труднее проверять в поведенческих экспериментах. Основная причина в том, что контролируемые манипуляции со сложными визуальными подсказками, такими как полная панорама ориентира или эксперименты с конфликтами между различными системами компаса, трудно выполнять в естественной навигационной среде. Точно так же исследования реальных вычислительных свойств релевантных для навигации нейронных цепей в настоящее время затруднены из-за ограничений в способах представления визуальной информации в электрофизиологических установках (см.г., таблица 1). В настоящее время не существует проекционных устройств, которые могут передавать полное информационное содержание пространственных, спектральных и поляризационных диаграмм сигналов, которые характеризуют естественную навигационную среду; и, наконец, навигационная компетентность насекомых основана на активных процессах обучения (например, Collett and Zeil, 2018; Jayatilaka et al., 2018; Zeil and Fleischmann, 2019) и опирается на активное сравнение между запомненными и испытанными в настоящее время шаблонами ввода (например, , Zeil, 2012; Le Möel, Wystrach, 2020; Murray et al., 2020). Таким образом, вероятно, что нейронный механизм, лежащий в основе навигации, в значительной степени зависит от состояния, контекста и активности, требуя замкнутого управления визуальной сценой со стороны насекомого и контроля экспериментатора над опытом (что было изучено?), мотивация (какова цель навигации?) и состояние животного (содержит ли оно информацию из интеграции путей или нет).
Точно так же исследования реальных вычислительных свойств релевантных для навигации нейронных цепей в настоящее время затруднены из-за ограничений в способах представления визуальной информации в электрофизиологических установках (см.г., таблица 1). В настоящее время не существует проекционных устройств, которые могут передавать полное информационное содержание пространственных, спектральных и поляризационных диаграмм сигналов, которые характеризуют естественную навигационную среду; и, наконец, навигационная компетентность насекомых основана на активных процессах обучения (например, Collett and Zeil, 2018; Jayatilaka et al., 2018; Zeil and Fleischmann, 2019) и опирается на активное сравнение между запомненными и испытанными в настоящее время шаблонами ввода (например, , Zeil, 2012; Le Möel, Wystrach, 2020; Murray et al., 2020). Таким образом, вероятно, что нейронный механизм, лежащий в основе навигации, в значительной степени зависит от состояния, контекста и активности, требуя замкнутого управления визуальной сценой со стороны насекомого и контроля экспериментатора над опытом (что было изучено?), мотивация (какова цель навигации?) и состояние животного (содержит ли оно информацию из интеграции путей или нет).
Таблица 1 . Параметрическое сравнение существующих систем виртуальной реальности для исследования насекомых и Антариума.
Имея это в виду, мы разработали Антариум, устройство для панорамной проекции, которое позволило бы нам представить муравьев, идущих по трекболу, с видами их известной среды кормления, и дать насекомым полный контроль над преобразованиями вида, возвращая их предполагаемые движения. на панораму. Помимо технических проблем, связанных с самим устройством, есть два предварительных условия для его работы: необходимость знать движения муравьев в их естественной среде кормления и способ воссоздать виды, с которыми они столкнутся в естественных условиях.Чтобы удовлетворить первое условие, мы полагаемся на несколько лет отслеживания перемещений муравьев с помощью дифференциальной GPS, как во время их нормальной кормодобывающей деятельности, так и после экспериментов по систематическому перемещению (например, Narendra et al., 2013; Reid et al. , 2013; Jayatilaka et al. ., 2014; Zeil et al., 2014). Во-вторых, мы использовали методы LIDAR и камеры для построения трехмерных моделей среды кормления муравьев (например, Stürzl et al., 2015; Murray and Zeil, 2017), которые теперь мы можем использовать для визуализации панорамных изображений в любом месте в пределах ареал обитания муравьев и проецирование их в Антариум.
, 2013; Jayatilaka et al. ., 2014; Zeil et al., 2014). Во-вторых, мы использовали методы LIDAR и камеры для построения трехмерных моделей среды кормления муравьев (например, Stürzl et al., 2015; Murray and Zeil, 2017), которые теперь мы можем использовать для визуализации панорамных изображений в любом месте в пределах ареал обитания муравьев и проецирование их в Антариум.
Антариум — не первое устройство «виртуальной реальности» в исследованиях насекомых, но это первое устройство, которое было разработано с конкретной целью обеспечить представление естественной, в отличие от синтетической, визуальной среды навигации (например, Van De Poll и др., 2015). Мы суммируем характеристики некоторых устройств, описанных в литературе, в таблице 1 и кратко описываем их свойства ниже (см. Также Fry et al., 2004, 2008; Dombeck and Reiser, 2012; Schultheiss et al., 2017; Stowers et al., 2017).
Дикинсон и Лайтон (1995) построили цилиндрическую арену с зелеными светодиодами, которая была ограничена отображением темной вертикальной полосы, которую можно было вращать вокруг животного. Устройство не могло отобразить произвольную сцену. Аналогичным образом Strauss et al. (1997) разработали проектор для прогулок Drosophila экспериментов. Это устройство цилиндрической формы с монохромными (зелеными) светодиодами. Полноцветный компьютерный проектор с полусферическим экраном с обратной проекцией был построен Греем и др. (2002) и в сочетании с аэродинамической трубой для исследования бабочек.Устройство FliMax (Lindemann et al., 2003) — это светодиодный проектор, разработанный для исследования мух. Он обеспечивает монохроматическое (зеленое) изображение привязанного насекомого во фронтальном поле зрения и использовался для представления реконструированных последовательностей изображений вне помещения в электрофизиологических экспериментах (Boeddeker et al., 2005). Рейзер и Дикинсон (2008) разработали модульное проекционное устройство, состоящее из небольших одинаковых квадратных панелей монохроматических (зеленых) светодиодов. Эти модули можно использовать для мозаики поверхности, имеющей кривизну не более чем вокруг одной оси, например цилиндра.
Устройство не могло отобразить произвольную сцену. Аналогичным образом Strauss et al. (1997) разработали проектор для прогулок Drosophila экспериментов. Это устройство цилиндрической формы с монохромными (зелеными) светодиодами. Полноцветный компьютерный проектор с полусферическим экраном с обратной проекцией был построен Греем и др. (2002) и в сочетании с аэродинамической трубой для исследования бабочек.Устройство FliMax (Lindemann et al., 2003) — это светодиодный проектор, разработанный для исследования мух. Он обеспечивает монохроматическое (зеленое) изображение привязанного насекомого во фронтальном поле зрения и использовался для представления реконструированных последовательностей изображений вне помещения в электрофизиологических экспериментах (Boeddeker et al., 2005). Рейзер и Дикинсон (2008) разработали модульное проекционное устройство, состоящее из небольших одинаковых квадратных панелей монохроматических (зеленых) светодиодов. Эти модули можно использовать для мозаики поверхности, имеющей кривизну не более чем вокруг одной оси, например цилиндра. Проекционная система, разработанная Takalo et al. (2012) основан на модифицированном видеопроекторе со сложной оптикой. Paulk et al. (2014) использовали четыре светодиодные панели, чтобы построить квадратный колодец вокруг животного на трекболе. Панели представляют собой квадраты размером примерно 20 см с матрицей RGB-светодиодов 32 на 32 на каждой. Использовался только зеленый канал, животному были показаны только вертикальные полосы. Коммерческие проекторы, направленные на полушарие, использовали Пекмезиан и Тейлор (2015), которые представили искусственную трехмерную среду для прыгающих пауков, установленных на трекболе.Koenig et al. (2016) спроецировали простые формы на прямоугольный массив световодов, другие концы которых выровняли стены цилиндрической арены. Совсем недавно Kaushik et al. (2020) построили арену, на которой привязанное насекомое помещается в геометрический центр треугольной призмы, образованной тремя перевернутыми на бок высокоскоростными коммерческими компьютерными мониторами, обеспечивая полноцветное видео с трехмерным смоделированным ландшафтом.
Проекционная система, разработанная Takalo et al. (2012) основан на модифицированном видеопроекторе со сложной оптикой. Paulk et al. (2014) использовали четыре светодиодные панели, чтобы построить квадратный колодец вокруг животного на трекболе. Панели представляют собой квадраты размером примерно 20 см с матрицей RGB-светодиодов 32 на 32 на каждой. Использовался только зеленый канал, животному были показаны только вертикальные полосы. Коммерческие проекторы, направленные на полушарие, использовали Пекмезиан и Тейлор (2015), которые представили искусственную трехмерную среду для прыгающих пауков, установленных на трекболе.Koenig et al. (2016) спроецировали простые формы на прямоугольный массив световодов, другие концы которых выровняли стены цилиндрической арены. Совсем недавно Kaushik et al. (2020) построили арену, на которой привязанное насекомое помещается в геометрический центр треугольной призмы, образованной тремя перевернутыми на бок высокоскоростными коммерческими компьютерными мониторами, обеспечивая полноцветное видео с трехмерным смоделированным ландшафтом.
Проект «Антариум» нацелен на разработку проекционной системы для экспериментов по навигации муравьев, которая должна быть способна отображать панорамные виды естественной среды обитания муравьев в поисках пищи таким образом, чтобы учитывать их спектральную и поляризационную чувствительность, а также позволять муравьям взаимодействовать со сценой. и экспериментатор может изменять его произвольным образом.
Ни одна из существующих систем проецирования не может удовлетворить все эти аспекты. Вначале учитывались следующие ограничения:
• Поскольку у муравьев есть панорамное зрение (например, Zollikofer et al., 1995; Schwarz et al., 2011), арена должна охватывать азимут 360 ° и все небесное полушарие. Точно так же арена должна иметь возможность проецировать наземные элементы до отметки -45 °.
• На момент создания Антариума спектральная чувствительность Myrmecia муравьев была неизвестна, но разрозненные отчеты предполагали, что муравьи, как правило, обладают УФ-, синим и зеленым рецепторами (см. Ссылки в Ogawa et al., 2015).
Ссылки в Ogawa et al., 2015).
• Антариум должен обеспечивать свет достаточной интенсивности на этих длинах волн. В солнечный день яркость естественной сцены может варьироваться на 5 логических единиц. Антариум должен иметь такой же диапазон интенсивности.
• Как и большинство насекомых, муравьи обладают спинной областью глаза с чувствительными к ультрафиолету и поляризацией рецепторами, которые попадают в систему поляризационного компаса светового люка. Следовательно, Антариум должен обеспечивать регулируемую поляризацию, покрывающую небесное полушарие.
• Работаем с австралийскими муравьями-быками. Один из самых крупных муравьев-быков ( Myrmecia pyriformis ) имеет около 3500 омматидий на глаз (Нарендра и др., 2011). Поэтому во избежание наложения спектров количество пикселей должно быть не менее 20 000.
• Критическая частота слияния мерцаний (CFFF) была определена для двух видов Myrmecia , для ночного M. midas при 84,6 ± 3,2 Гц и для суточно-сумеречного M. tarsata при 154,0 ± 8,5 Гц (для обзор см. Ogawa et al., 2019). Для Antarium мы выбрали минимальную частоту мерцания 300 Гц. Минимальная частота кадров, с которой муравьи могут наблюдать непрерывное движение, неизвестна, но она не может быть выше критической частоты слияния. Следовательно, частоты кадров, близкой к 200 кадрам в секунду, должно быть достаточно.
tarsata при 154,0 ± 8,5 Гц (для обзор см. Ogawa et al., 2019). Для Antarium мы выбрали минимальную частоту мерцания 300 Гц. Минимальная частота кадров, с которой муравьи могут наблюдать непрерывное движение, неизвестна, но она не может быть выше критической частоты слияния. Следовательно, частоты кадров, близкой к 200 кадрам в секунду, должно быть достаточно.
• Мы решили использовать систему трекбола, разработанную Dahmen et al. (2017), который записывает вращение выдолбленной сферы из пенополистирола с воздушной опорой с помощью оптических датчиков мыши. Помимо очень высокой частоты дискретизации, преимущества этой системы заключаются в том, что ее можно использовать двумя способами: с привязанным животным, которое может свободно вращаться вокруг оси рыскания, и с трекболом, записывающим только поступательные движения животного, и с фиксированным привязанным животным, так что что движения трекбола отражают как рыскание, так и поступательные движения животного.
• Наконец, нам пришлось действовать в условиях жестких бюджетных ограничений.
Антариум предлагает уникальные и важные возможности для исследования визуальной навигации у муравьев и тестирования моделей визуальной навигации. Это позволяет нам противостоять муравьям как в открытом, так и в замкнутом цикле с знакомыми и незнакомыми видами их естественной среды, но также и с совершенно невыразительными визуальными сценами, или со сценами, в которых доминирующие объекты были удалены или перемещены, или которые были изменены в пространстве или в пространстве. спектральный состав.Что наиболее важно, Антариум может быть использован в будущем для исследования нейрофизиологической основы навигации муравьев в естественной визуальной среде.
Дизайн Антариума
Геометрия
Хотя идеальный проектор был бы сферическим, некоторые практические ограничения делают его несостоятельным. Например, если бы светодиоды были просверлены и приклеены к внутренней поверхности сферы, оптика была бы идеальной (см., Например, Koenig et al., 2016). Однако припаивание тысяч светодиодов к драйверу вручную чревато ошибками и чрезвычайно трудоемко, а значит, непомерно дорого. Более быстрая и дешевая альтернатива — машинные печатные платы (PCB). Печатные платы могут иметь любую форму, но должны быть плоскими, что ограничивает проектор в виде многогранной аппроксимации сферы. Поскольку производство печатных плат связано с большими затратами на NRE (единовременное проектирование), будет значительно дешевле, если многогранник может быть построен из одинаковых граней. Таким образом, число граней представляет собой компромисс между оптическими свойствами и стоимостью, при этом большие числа приводят к лучшему приближению к сфере, но более высоким затратам на печать и труд.Чтобы гарантировать, что каждая грань имеет идентичные свойства, т.е. что расположение светодиодов на них может быть идентичным, все вершины многогранника должны лежать на сфере.
Более быстрая и дешевая альтернатива — машинные печатные платы (PCB). Печатные платы могут иметь любую форму, но должны быть плоскими, что ограничивает проектор в виде многогранной аппроксимации сферы. Поскольку производство печатных плат связано с большими затратами на NRE (единовременное проектирование), будет значительно дешевле, если многогранник может быть построен из одинаковых граней. Таким образом, число граней представляет собой компромисс между оптическими свойствами и стоимостью, при этом большие числа приводят к лучшему приближению к сфере, но более высоким затратам на печать и труд.Чтобы гарантировать, что каждая грань имеет идентичные свойства, т.е. что расположение светодиодов на них может быть идентичным, все вершины многогранника должны лежать на сфере.
Мы выбрали вписанный додекаэдр пентакис (рис. 1А) в качестве сферического приближения для Антария. У него 60 граней одинаковых равнобедренных треугольников. Пять треугольников образуют пятиугольную пирамиду, а 12 таких пирамид составляют твердое тело. У Антариума одна такая пирамида удалена внизу, обеспечивая отверстие, в которое можно вставить трекбол с привязанным животным.
У Антариума одна такая пирамида удалена внизу, обеспечивая отверстие, в которое можно вставить трекбол с привязанным животным.
Рисунок 1 . Антариум. (A) Концептуальная схема вписанного додекаэдра пентакис с 55 гранями одинаковых равнобедренных треугольников, несущих светодиоды, управляющую электронику и устройство трекбола. (B) Привязанный муравей на трекболе на воздушной подушке. Муравьи могут свободно вращаться вокруг оси рыскания, но их поступательные движения регистрируются путем отслеживания вращения шара из пенополистирола. (C) Привязанный муравей, видимый камерой Антариума. (D) Антариум полностью собран. (E) Пейзажная панорама, проецируемая светодиодами Антариума, видна с разрешением 1,5 °, что примерно вдвое превышает среднее разрешение муравьев.
Физические размеры Антариума ограничены плотностью электронных схем, механическими ограничениями и необходимостью того, чтобы отверстие внизу было достаточно большим для вставки трекбола. С учетом всех этих факторов длина основания треугольника была выбрана равной 368 мм.Все остальные размеры определяются геометрией додекаэдра пентакиса, в результате чего получается устройство диаметром примерно 1 м (рис. 1D).
С учетом всех этих факторов длина основания треугольника была выбрана равной 368 мм.Все остальные размеры определяются геометрией додекаэдра пентакиса, в результате чего получается устройство диаметром примерно 1 м (рис. 1D).
Расположение пикселей
В идеале светодиоды должны быть как можно более равномерно распределены по поверхности многогранника, что является сложной задачей, поскольку необходимо учитывать непрерывность рисунка между соседними панелями. Был обнаружен паттерн, где светодиоды находятся в вершинах гексагональной решетки. Была написана компьютерная программа, которая рассчитывала положения пикселей и минимизировала изменение угла между пикселями, принимая во внимание технологические ограничения производства.
Были рассчитаны две такие гексагональные сетки, одна для пикселей GB (зеленый / синий), а другая для пикселей UV. Угловые функции приема намного шире, а расстояние между омматидиями в области спинного края намного больше, чем в остальной части глаза. Было решено, что структура УФ-светодиодов должна быть значительно более разреженной, чем узор BG, особенно из-за высокой стоимости УФ-светодиодов и необходимости их регулируемой поляризации.
Было решено, что структура УФ-светодиодов должна быть значительно более разреженной, чем узор BG, особенно из-за высокой стоимости УФ-светодиодов и необходимости их регулируемой поляризации.
Каждый треугольник содержит 361 синий / зеленый пиксель и девять УФ-пикселей (рисунки 2A, B).Таким образом, 55 треугольников, образующих Антариум, вместе имеют 19 855 ГБ пикселей и 495 УФ пикселей. Поскольку в то время не было доступной информации о спектральной чувствительности, светодиоды были выбраны на основе их цены, доступности, физического размера, яркости и угла луча. Выбранные светодиоды: LTST-C930KGKT (Lite-On, Inc), LTST-C930TBKT (Lite-On Inc.,) и VLMU3100 (Vishay) для зеленого, синего и ультрафиолетового цветов соответственно. Как видно на рисунке 2C, спектральное излучение текущих светодиодов плохо согласуется со спектральной чувствительностью фоторецепторов, которая с тех пор была определена у муравьев Myrmecia (Ogawa et al., 2015). Эта проблема будет исправлена в Antarium Mark II, который в настоящее время находится в разработке (см. Раздел «Перспективы» ниже).
Раздел «Перспективы» ниже).
Рисунок 2 . Дизайн индивидуальных панелей Антариум. (A) Фотография одной из панелей со светодиодами в виде белых прямоугольников. (B) Деталь расположения светодиодов панели на печатной плате и расположение оси привода для дисков поляризатора. (C) Спектральная чувствительность муравьев Myrmecia по сравнению с текущими спектрами излучения светодиодов.Непрерывные линии: нормализованная спектральная чувствительность ночной Myrmecia vindex , зарегистрированная внутриклеточно (перерисовано из Ogawa et al., 2015). Пунктирные линии: спектры излучения светодиодов, используемых в текущей версии Antarium, в соответствии со спецификациями производителя. (D) Схема того, как достигается поляризация света. (E) Путь к данным Антариума.
Предварительные эксперименты выявили значительные внутренние отражения в Антариуме, которые впоследствии были минимизированы путем установки на его внутреннюю поверхность черной картонной крышки с низким коэффициентом отражения. Мы измерили коэффициент отражения черного картона с помощью спектрометра USB-4000 Ocean Optics по сравнению с сертифицированным эталоном отражения от LabSphere при естественном освещении. Для всех точек длины волны интенсивность картона была разделена на интенсивность стандарта отражательной способности. В диапазоне от 400 до 700 нм картон отражает от 5 до 7% света без провалов и пиков.
Поляризация
Регулируемая поляризация УФ-светодиодов основана на том, что каждый УФ-пиксель состоит из двух УФ-светодиодов (рис. 2D).Один из них вообще не поляризован. Другой расположен за линейным поляризатором. Поляризатор представляет собой небольшой диск, установленный на оси поворотного привода. Привод может вращать диск, поэтому его плоскость поляризации может быть под любым углом. Изменяя относительную интенсивность поляризованных и неполяризованных светодиодов, можно также управлять глубиной поляризации.
Привод должен быть быстрым, так как он должен иметь возможность отслеживать изменения сцены. Шаговые двигатели и сервоприводы работают слишком медленно.Выбранный привод представляет собой воздушный сердечник, состоящий из небольшого ротора с постоянным магнитом и статора с двумя катушками, расположенными ортогонально. Комбинированные магнитные поля двух катушек могут иметь постоянную силу, но настраиваться в любом направлении, управляя одной катушкой током, который пропорционален синусу желаемого углового положения, а другой — косинусу. Ротор с постоянным магнитом всегда будет выровнен по направлению магнитного поля. Поскольку ротор имеет небольшую массу, воздушный сердечник можно довольно быстро привести в новое положение.Во время оседания он имеет тенденцию к колебаниям, но производители также предлагают устройства с небольшой каплей силиконового масла в подшипнике ротора. Масло действует как демпфер, и постоянная времени демпфирования зависит от вязкости используемого масла. При правильной вязкости оседание может приблизиться к теоретическому оптимуму. Выбранный воздушный сердечник MicroAirCore 2022-715 от Simco, Limited был протестирован в лаборатории, и он быстро устанавливался с очень небольшими колебаниями.
Шаговые двигатели и сервоприводы работают слишком медленно.Выбранный привод представляет собой воздушный сердечник, состоящий из небольшого ротора с постоянным магнитом и статора с двумя катушками, расположенными ортогонально. Комбинированные магнитные поля двух катушек могут иметь постоянную силу, но настраиваться в любом направлении, управляя одной катушкой током, который пропорционален синусу желаемого углового положения, а другой — косинусу. Ротор с постоянным магнитом всегда будет выровнен по направлению магнитного поля. Поскольку ротор имеет небольшую массу, воздушный сердечник можно довольно быстро привести в новое положение.Во время оседания он имеет тенденцию к колебаниям, но производители также предлагают устройства с небольшой каплей силиконового масла в подшипнике ротора. Масло действует как демпфер, и постоянная времени демпфирования зависит от вязкости используемого масла. При правильной вязкости оседание может приблизиться к теоретическому оптимуму. Выбранный воздушный сердечник MicroAirCore 2022-715 от Simco, Limited был протестирован в лаборатории, и он быстро устанавливался с очень небольшими колебаниями. Поворот на 180 ° может быть достигнут менее чем за 200 мс.
Поворот на 180 ° может быть достигнут менее чем за 200 мс.
Светодиодное вождение
Для обеспечения постоянной яркости светодиоды должны работать от источника постоянного тока. Яркость светодиода зависит от протекающего по нему тока. Светодиоды представляют собой полупроводниковые диоды с нелинейными ВАХ. Также, как и у всех полупроводниковых устройств, характеристики зависят от температуры кристалла. Хотя лаборатория обычно представляет собой комнату с кондиционером, светодиоды выделяют тепло, которое нагревает их. Светодиод, который некоторое время был ярким, будет значительно теплее, чем светодиод, который работал с низкой интенсивностью.
Чтобы имитировать естественные условия, диапазон интенсивности на арене должен охватывать около 5 логарифмических единиц. 16-битный линейно разнесенный режим интенсивности (65 536 уровней) соответствует 4,8 логарифмическим единицам. Мы использовали имеющийся в продаже чип драйвера светодиода, MBI5040 от Macroblock, который удовлетворяет всем этим критериям. Он может управлять 16 светодиодами с постоянным током. Он использует схему 16-битной широтно-импульсной модуляции (ШИМ) для индивидуальной настройки яркости каждого светодиода. Он также может применять схему коррекции для компенсации изменения яркости светодиода.Схема коррекции может изменять ток возбуждения от 0 до номинального максимума с шагом 1% для каждого светодиода отдельно. Кроме того, он может обнаруживать и сообщать о неисправностях светодиодов короткого замыкания и обрыва цепи. Кроме того, микросхема может работать с падением напряжения всего 0,5 В на схеме управления, что является важной особенностью с точки зрения энергопотребления. Максимальный ток привода составляет 30 мА на светодиод; светодиоды, используемые в Антариуме, используют управляющий ток только 20 мА, что намного ниже пределов микросхемы.
Он может управлять 16 светодиодами с постоянным током. Он использует схему 16-битной широтно-импульсной модуляции (ШИМ) для индивидуальной настройки яркости каждого светодиода. Он также может применять схему коррекции для компенсации изменения яркости светодиода.Схема коррекции может изменять ток возбуждения от 0 до номинального максимума с шагом 1% для каждого светодиода отдельно. Кроме того, он может обнаруживать и сообщать о неисправностях светодиодов короткого замыкания и обрыва цепи. Кроме того, микросхема может работать с падением напряжения всего 0,5 В на схеме управления, что является важной особенностью с точки зрения энергопотребления. Максимальный ток привода составляет 30 мА на светодиод; светодиоды, используемые в Антариуме, используют управляющий ток только 20 мА, что намного ниже пределов микросхемы.
На треугольнике имеется 361 пиксель BG и 9 пикселей UV, а MBI5040 может управлять 16 светодиодами (т.е.е., восемь пикселей), поэтому каждая панель содержит 47 микросхем.
Замечания по мерцанию
Использование ШИМ для настройки яркости светодиода приводит к мерцанию. ШИМ работает, переключая светодиод на полную яркость на короткое время, а затем полностью погаснув на какое-то другое время; средняя интенсивность — это соотношение времени включения и периода ШИМ (сумма времени включения и выключения). Таким образом, светодиод мигает с периодом ШИМ. При использовании дискретных приращений количество отображаемых уровней равно количеству приращений за период ШИМ.Чтобы муравьи не видели мерцания, Антариуму требуется частота мерцания 300 Гц и более. Таким образом, период ШИМ должен быть не более 3,33 мс, что при 65 536 уровнях дает элементарный приращение времени 50,86 нс и тактовую частоту 19,7 МГц. Мы решили запустить ШИМ на частоте 20 МГц, хотя чип MBI5040 мог работать на частоте до 30 МГц.
Однако другой метод позволяет нам достичь гораздо более высокой частоты мерцания, намного превышающей ту, которая может быть обнаружена любой биологической системой. MBI5040 реализует так называемую скремблированную ШИМ — схему, предназначенную для увеличения частоты мерцания выше периода ШИМ. Вместо того, чтобы включать светодиод на время включения, а затем гасить его на время выключения, схема распределяет это время в пределах периода ШИМ. Например, если период равен 10 единицам времени, а яркость светодиода составляет 30%, простой ШИМ включит его на 3 единицы, а затем выключит на 7 единиц. Однако система с шифрованием PWM может включать светодиод для 1 устройства, затем выключать для 2 устройств, включать 1, отключать 2, включать 1, отключать 3.Поскольку светодиод был включен для 3 устройств и выключен для 7, средняя яркость по-прежнему составляет 30%, но теперь светодиод мигнул три раза в течение периода, а не один раз. Есть разные способы разбрасывания. Метод MBI5040 активируется, когда уровень яркости превышает 32 единицы из 65 536. Antarium использует тактовую частоту 20 МГц, поэтому, если яркость светодиода выше 0,05% от полной шкалы, частота мерцания будет более 9 кГц, а ниже этого порога для очень темных светодиодов мерцание будет 305 Гц.
MBI5040 реализует так называемую скремблированную ШИМ — схему, предназначенную для увеличения частоты мерцания выше периода ШИМ. Вместо того, чтобы включать светодиод на время включения, а затем гасить его на время выключения, схема распределяет это время в пределах периода ШИМ. Например, если период равен 10 единицам времени, а яркость светодиода составляет 30%, простой ШИМ включит его на 3 единицы, а затем выключит на 7 единиц. Однако система с шифрованием PWM может включать светодиод для 1 устройства, затем выключать для 2 устройств, включать 1, отключать 2, включать 1, отключать 3.Поскольку светодиод был включен для 3 устройств и выключен для 7, средняя яркость по-прежнему составляет 30%, но теперь светодиод мигнул три раза в течение периода, а не один раз. Есть разные способы разбрасывания. Метод MBI5040 активируется, когда уровень яркости превышает 32 единицы из 65 536. Antarium использует тактовую частоту 20 МГц, поэтому, если яркость светодиода выше 0,05% от полной шкалы, частота мерцания будет более 9 кГц, а ниже этого порога для очень темных светодиодов мерцание будет 305 Гц. Тесты фотодиодов с помощью осциллографа подтвердили мерцание на частоте 9 кГц.
Тесты фотодиодов с помощью осциллографа подтвердили мерцание на частоте 9 кГц.
Доставка видео и частота кадров
Поскольку светодиодная матрица Антариума — это просто устройство отображения, необходимо определить способ доставки данных с компьютера визуализации, чтобы понимать всю информацию светодиодов Антариума. В целом Antarium имеет 20 350 пикселей, для каждого из которых требуется 2 × 16 бит данных для установки яркости, что в сумме дает 651 200 бит на видеокадр. Наиболее распространенные каналы связи на компьютере — это USB и Ethernet.Когда был разработан Antarium, самая быстрая скорость USB была 450 Мбит / с (полная скорость USB-2.0), следующим шагом было 12 Мбит / с (высокая скорость USB-2.0). Наиболее распространенным интерфейсом Ethernet был так называемый 100BASE-TX, обеспечивающий скорость передачи 100 Мбит / с по широко распространенному «синему кабелю» (официально именуемому кабелем витой пары категории 5). В то время микросхемы полноскоростного интерфейса USB не были доступны, а высокоскоростной USB был просто недостаточно быстрым. Поэтому мы выбрали канал Ethernet 100 Мбит / с в качестве среды доставки видеопотока.
Поэтому мы выбрали канал Ethernet 100 Мбит / с в качестве среды доставки видеопотока.
Если полный кадр составляет 0,6512 Мбит / с, то теоретический предел для канала со скоростью 100 Мбит / с составляет 153 кадра в секунду. На самом деле меньше, так как есть накладные расходы протокола. Это не соответствует нашей цели 200 кадров в секунду, поэтому нам нужно было найти способы сжатия видеопотока.
Схема сжатия должна быть относительно простой, чтобы панели Антариума могли ее декодировать и чтобы любой компьютер мог ее кодировать без специального оборудования. Решение, которое мы выбрали, — это подвыборка информации о цвете.Вместо того, чтобы предоставлять 16-битные значения зеленого и синего разрешения для пикселя независимо друг от друга, можно передавать 16-битное значение яркости и 8-битное значение цветности. Это экономит 25% полосы пропускания видео (24 бита на пиксель вместо 32). Он не ставит под угрозу диапазон яркости в 4,8 логарифмических единиц, однако ограничивает каждый пиксель 256 доступными оттенками.
Самый простой способ отправки данных с компьютера по каналу Ethernet — использование стандартного протокола, поддерживаемого любой операционной системой.Одним из них является UDP (протокол пользовательских дейтаграмм), где блоки данных (пакеты) отправляются с одной машины на другую. Преимущество UDP в том, что он имеет меньшие накладные расходы, чем другие протоколы. С другой стороны, он не гарантирует доставку и не дает информации о том, прибыл ли когда-либо пакет. UDP часто используется в ситуациях, когда случайная потеря пакета допустима, но непредсказуемые задержки, возникающие из-за подтверждения приема каждого пакета и повторной отправки потерянных пакетов, недопустимы.Эти сильные стороны и ограничения хорошо подходят для потоковой передачи видео, поскольку, если один видеокадр теряется, большую часть времени наблюдатель даже не заметит. Если же потоковая передача остановлена, пока отправитель и получатель согласовывают повторную передачу одного пакета, видео быстро становится недоступным для просмотра. Поэтому Antarium использует UDP для доставки видео с выделенным каналом Ethernet, чтобы гарантировать, что потеря пакетов будет редкой.
Поэтому Antarium использует UDP для доставки видео с выделенным каналом Ethernet, чтобы гарантировать, что потеря пакетов будет редкой.
Фрейм Ethernet содержит до 1500 байтов фактических данных (обычно называемых полезной нагрузкой) и еще 38 байтов синхронизации адресации и другой вспомогательной информации.Кроме того, UDP добавляет 24 байта информации протокола к части пакета данных. Таким образом, служебные данные протокола составляют 62 байта для каждого кадра Ethernet с пакетом UDP в нем. В полном кадре видео один треугольник Антариума представлен 1110 байтами. К необработанным данным добавляются два дополнительных байта по причинам, которые будут объяснены позже. Следовательно, полезная нагрузка составляет 1112 байт. Если каждый пакет содержит видеоинформацию размером в один треугольник, то на каждый треугольник необходимо передать 1174 байта. Видеокадр содержит 55 таких кадров Ethernet, что дает теоретическую максимальную скорость передачи видео 194 кадра в секунду по выделенному каналу Ethernet. Действительно, на практике Антариум поддерживает около 190 кадров в секунду.
Действительно, на практике Антариум поддерживает около 190 кадров в секунду.
Архитектура
Управление девятью приводами поляризации превышает возможности доступных микроконтроллеров, поэтому панели Antarium вместо этого оснащены программируемой вентильной матрицей (FPGA). Блок обработки каждого треугольника должен принимать видеокадры и отправлять данные о яркости на 47 микросхем драйвера светодиодов. Кроме того, он должен управлять током возбуждения девяти приводов поляризаторов, каждый из которых имеет две катушки (всего 18 линий привода).Использование широтно-импульсной модуляции (ШИМ) для установки тока требует устройства с 18 модулями ШИМ, которые не поддерживает ни один коммерчески доступный микроконтроллер. Вместо этого мы решили использовать FPGA. ПЛИС — это просто большой набор простых блоков цифровой логики, которые затем могут быть соединены внутри микросхемы, чтобы сформировать цифровую схему, выполняющую определенную функцию. Микроконтроллеры хорошо подходят для задач, которые работают с меньшим количеством аппаратных сигналов одновременно и где логика принятия решений или вычисления являются сложными. Для задач, в которых имеется много аппаратных сигналов, а вычисления и принятие решений относительно просты, но должны выполняться на высокой скорости и с точной синхронизацией, FPGA часто являются лучшим выбором. Большое количество сигналов ШИМ делает FPGA лучшим решением для Antarium. Таким образом, каждая треугольная панель содержит чип XC3S50AN от Xilinx, Incorporation. Микросхема имеет ресурсы на 50 000 логических элементов и может обрабатывать более 80 цифровых сигналов ввода / вывода на высокой скорости.
Для задач, в которых имеется много аппаратных сигналов, а вычисления и принятие решений относительно просты, но должны выполняться на высокой скорости и с точной синхронизацией, FPGA часто являются лучшим выбором. Большое количество сигналов ШИМ делает FPGA лучшим решением для Antarium. Таким образом, каждая треугольная панель содержит чип XC3S50AN от Xilinx, Incorporation. Микросхема имеет ресурсы на 50 000 логических элементов и может обрабатывать более 80 цифровых сигналов ввода / вывода на высокой скорости.
Для наших треугольных панелей FPGA должна буферизовать видеокадр, декодировать сжатую цветность, отправлять декодированные данные на микросхемы драйверов светодиодов и запускать 18 контроллеров PWM для исполнительных механизмов, что потребляет около 60% ее ворот.Оставшихся 40% недостаточно для работы протоколов Ethernet и UDP в качестве логической схемы. Хотя мы могли бы использовать более мощный чип, дополнительные расходы на каждые 55 панелей были бы значительными. Вместо этого мы решили разработать единую интерфейсную плату с соответствующими одноразовыми расходами, которая получает видеопоток от компьютера и распределяет его по треугольникам более простым способом.
Когда ПЛИС на каждой треугольной панели получает кадр, она декодирует кодировку цветности и собирает 16-битные значения интенсивности для каждого светодиода в буфере.В конце видеокадра буфер отправляется на микросхемы драйвера светодиода. Драйверы имеют интерфейс SPI (последовательное периферийное соединение), стандартизированную последовательную шину. Микросхемы драйверов светодиодов предназначены для последовательного подключения. Поскольку очень длинные цепочки SPI технически проблематичны, мы разделили драйверы светодиодов на четыре цепочки. ПЛИС одновременно доставляет видеоданные к микросхемам в четырех цепочках SPI, что позволяет нам использовать более низкую скорость на шинах.
Мы используем H-мостовую конструкцию для ШИМ-контроллера приводов поляризатора, которая обеспечивает значительное снижение потребления энергии, когда приводы не работают.Чтобы управлять одним H-мостом, FPGA должна генерировать два сигнала, поэтому для двух катушек по девять исполнительных механизмов в каждой генерируется 36 выходных сигналов. Такая конструкция позволяет экономить энергию, поскольку ПЛИС снижает ток на обеих катушках в один и тот же коэффициент (таким образом, сохраняя их соотношение и, следовательно, угол наклона исполнительного механизма), когда исполнительный элемент неподвижен. Этот ток удержания составляет четверть тока, используемого для перемещения привода. Если необходимо изменить положение привода, FPGA переключает ток возбуждения обратно на номинальный, а когда положение не меняется в течение некоторого времени, медленно снижает ток до четверти удерживаемого значения.
Такая конструкция позволяет экономить энергию, поскольку ПЛИС снижает ток на обеих катушках в один и тот же коэффициент (таким образом, сохраняя их соотношение и, следовательно, угол наклона исполнительного механизма), когда исполнительный элемент неподвижен. Этот ток удержания составляет четверть тока, используемого для перемещения привода. Если необходимо изменить положение привода, FPGA переключает ток возбуждения обратно на номинальный, а когда положение не меняется в течение некоторого времени, медленно снижает ток до четверти удерживаемого значения.
Наконец, мы разместили термодатчики на каждой треугольной панели, которые также контролируются ПЛИС. Данные от этих датчиков могут быть отправлены обратно по сети, что важно, учитывая большое количество тепла, которое может выделяться, когда все устройство работает с максимальной яркостью.
Распределение мощности
Поскольку Антариум потребляет значительное количество энергии, обеспечение надлежащего питания было неотъемлемой частью. Каждому светодиоду требуется 20 мА для полной яркости. Типичный синий или УФ-светодиод имеет падение напряжения около 3.4 В. Микросхема драйвера требует дополнительных 0,5 В, в результате чего минимальное напряжение источника питания составляет 3,9 В. Для учета отклонений и обеспечения запаса прочности схема драйвера светодиода работает от источника питания 4,2 В. Благодаря использованию кодирования интенсивности / цветности пикселю никогда не требуется более 20 мА. Следовательно, 370 пикселей треугольной панели потребляют 7,4 А. Кроме того, сами микросхемы драйверов также потребляют примерно 30 мА от того же источника питания. С 47 микросхемами драйверов на панель, которые добавляют к нагрузке 1,4 А.ПЛИС и ее вспомогательные схемы также должны быть поставлены, хотя этот ток питания незначителен по сравнению с током светодиодов и драйверов. Приводы работают от 12 В, а номинальный ток катушки составляет 54 мА. Однако из-за схемы управления sin / cos две катушки исполнительного механизма вместе имеют максимальное потребление тока 77 мА.
Каждому светодиоду требуется 20 мА для полной яркости. Типичный синий или УФ-светодиод имеет падение напряжения около 3.4 В. Микросхема драйвера требует дополнительных 0,5 В, в результате чего минимальное напряжение источника питания составляет 3,9 В. Для учета отклонений и обеспечения запаса прочности схема драйвера светодиода работает от источника питания 4,2 В. Благодаря использованию кодирования интенсивности / цветности пикселю никогда не требуется более 20 мА. Следовательно, 370 пикселей треугольной панели потребляют 7,4 А. Кроме того, сами микросхемы драйверов также потребляют примерно 30 мА от того же источника питания. С 47 микросхемами драйверов на панель, которые добавляют к нагрузке 1,4 А.ПЛИС и ее вспомогательные схемы также должны быть поставлены, хотя этот ток питания незначителен по сравнению с током светодиодов и драйверов. Приводы работают от 12 В, а номинальный ток катушки составляет 54 мА. Однако из-за схемы управления sin / cos две катушки исполнительного механизма вместе имеют максимальное потребление тока 77 мА. Таким образом, максимальный ток составляет 0,7 А.
Таким образом, максимальный ток составляет 0,7 А.
В целом плате требуется около 9 А от 4,2 В и 0,7 А от 12 В. Платы имеют два высокоэффективных импульсных источника питания, которые генерируют 12 В и 4 напряжения.2 В от источника питания 24 В. Эффективность этих источников питания близка к 90%, таким образом, плата потребляет максимум 2,13 А от 24 В. Поскольку ни при каких обстоятельствах все светодиоды всех треугольников не будут работать на полную мощность, в то время как все исполнительные механизмы также установлены на максимальное энергопотребление. В таком положении было решено, что коммерчески доступный блок питания на 24 В, 10 А от MeanWell может безопасно питать пять треугольников, образующих пятиугольник. Одиннадцать таких устройств питают Антариум. Потери мощности в кабелях сводятся к минимуму за счет использования достаточно толстых проводов.
Температурные характеристики
Максимальная потребляемая мощность Антариума составляет 2,5 кВт, что делает его тепловыделение примерно таким же, как у портативного масляного радиатора, которого достаточно для обогрева небольшой комнаты объемом 16 м 3 . Если бы эта тепловая энергия была сконцентрирована внутри объема Антариума менее 1 м 3 , температура очень быстро поднялась бы до некомфортно высокого уровня для любого объекта. Есть три способа снизить этот риск: уменьшить рассеиваемую мощность, обеспечить излучение тепла наружу, а не внутрь, и обеспечить конвекцию между внутренним и внешним пространством.
Если бы эта тепловая энергия была сконцентрирована внутри объема Антариума менее 1 м 3 , температура очень быстро поднялась бы до некомфортно высокого уровня для любого объекта. Есть три способа снизить этот риск: уменьшить рассеиваемую мощность, обеспечить излучение тепла наружу, а не внутрь, и обеспечить конвекцию между внутренним и внешним пространством.
Потребление минимизировано за счет использования естественных сцен, которые очень разнообразны и содержат много темных объектов, таких как стволы деревьев, здания и тени на земле (см. Рисунок 1E). Кроме того, чтобы компенсировать изменение интенсивности из-за параллакса, возникающего из-за геометрии Антариума, центральные светодиоды каждой панели искусственно затемнены. Вместе эти два фактора сокращают общее энергопотребление более чем вдвое.
К сожалению, большая часть тепла генерируется светодиодами, которые находятся внутри каждой панели.Чтобы свести к минимуму количество тепла внутри Антариума, мы использовали тот факт, что каждый светодиод подключен к сплошной медной плоскости рядом с внешней поверхностью печатной платы. В то время как обычно толщина меди в печатных платах составляет 35 мкм, мы использовали медь 70 мкм для Antarium, чтобы улучшить теплопроводность. Чтобы еще больше увеличить теплопроводность каждой панели, мы добавили большой открытый медный квадрат с внешней стороны каждой панели, который термически связан с внутренней плоскостью. Это позволяет нам прикрепить охлаждающий элемент Пельтье с радиатором и вентилятором, которые могут еще более эффективно отсасывать тепло и рассеивать его.Однако после тестирования Антариума в окончательном виде выяснилось, что в таком дополнительном охлаждении панелей нет необходимости.
В то время как обычно толщина меди в печатных платах составляет 35 мкм, мы использовали медь 70 мкм для Antarium, чтобы улучшить теплопроводность. Чтобы еще больше увеличить теплопроводность каждой панели, мы добавили большой открытый медный квадрат с внешней стороны каждой панели, который термически связан с внутренней плоскостью. Это позволяет нам прикрепить охлаждающий элемент Пельтье с радиатором и вентилятором, которые могут еще более эффективно отсасывать тепло и рассеивать его.Однако после тестирования Антариума в окончательном виде выяснилось, что в таком дополнительном охлаждении панелей нет необходимости.
Отсутствию необходимости в охлаждающем элементе, возможно, способствовало обеспечение хорошего воздушного потока между интерьером и экстерьером Антариума. Этой конвекции способствует небольшой настольный вентилятор, установленный под Антариумом, когда он работает, который подает свежий воздух во внутренний объем и вытесняет теплый воздух. Кроме того, помещение с кондиционером помогает поддерживать внутреннюю температуру на комфортном уровне, а также обеспечивает комфортную рабочую температуру для операторов при установке на 19 ° C.
Мы измерили температуру внутри Антариума в том месте, где муравей должен был находиться на трекболе, с помощью метеометра Kestrel 5500 (Kestrel, Австралия, Восточный Мельбурн, Виктория, Австралия), кондиционирования воздуха в помещении, установленного на 19 ° C, и после допуска температуры стабилизировать в течение 1 ч. Температуру регистрировали, когда она перестала изменяться в течение 3-х минутного периода. Мы измерили: Температура окружающей среды в помещении: 20,5 ° C в день 26 ° C; все светодиоды на максимальной мощности, без вентилятора: 61,3 ° C; естественное изображение, без вентилятора: 28.3 ° С; естественное изображение, с вентилятором: 25,1 ° C; температура окружающей среды, повторно протестированная после измерений в Антариуме: 20,5 ° C. Это находится в пределах естественной температуры кормления как для активных дневных, так и для ночных муравьев Myrmecia (Jayatilaka et al., 2011).
На рис. 1D показан полностью собранный Антариум.
Распределительный совет
Распределительная плата, как следует из названия, распределяет видеосигнал по треугольникам (рисунки 2E, 3). Он содержит микроконтроллер LPC1788 от NXP, Inc.Микроконтроллер имеет ядро ARM Cortex-M3, работающее на частоте 120 МГц, внутреннюю флэш-память 512 КБ и внутреннюю ОЗУ 96 КБ. Он также имеет встроенные периферийные устройства, включая механизм протокола Ethernet, механизм протокола SD-карты, несколько других блоков последовательной связи, таймеры и программируемые пользователем цифровые порты ввода-вывода. Его механизм Ethernet, дополненный контроллером доступа к внешнему носителю (TLK110, Texas Instruments), обеспечивает интерфейс Ethernet на 100 Мбит / с.
Он содержит микроконтроллер LPC1788 от NXP, Inc.Микроконтроллер имеет ядро ARM Cortex-M3, работающее на частоте 120 МГц, внутреннюю флэш-память 512 КБ и внутреннюю ОЗУ 96 КБ. Он также имеет встроенные периферийные устройства, включая механизм протокола Ethernet, механизм протокола SD-карты, несколько других блоков последовательной связи, таймеры и программируемые пользователем цифровые порты ввода-вывода. Его механизм Ethernet, дополненный контроллером доступа к внешнему носителю (TLK110, Texas Instruments), обеспечивает интерфейс Ethernet на 100 Мбит / с.
Рисунок 3 . Управляющая электроника Антариума. (A) Распределительный щит и его основная электроника. (B) Блок-схема светодиодной панели Программируемая вентильная матрица.
Микроконтроллер работает совместно с ПЛИС XC3S500E (Xilinx, Inc.), содержащей полмиллиона логических элементов. Между микроконтроллером и ПЛИС находится двухпортовый статический ОЗУ объемом 128 КБ (IDT70V28L, Integrated Device Technology). Все полученные кадры Ethernet записываются в двухпортовую RAM. Затем микроконтроллер декодирует протокол и анализирует пакеты.Пакеты, относящиеся к поддержанию соединения, обрабатываются микроконтроллером и отвечают на них. Если пакет содержит видеоданные, микроконтроллер отправляет сообщение на FPGA, что данные должны быть доставлены в треугольник. ПЛИС проверяет пакетные данные, решает, к какому пятиугольнику они принадлежат, и ставит их в очередь для передачи по одному из своих 11 выходных каналов к пятиугольникам. После доставки пакета в треугольник FPGA отправляет сообщение микроконтроллеру, информируя его о том, что данные отсутствуют и данная область двухпортовой RAM может быть освобождена.
Все полученные кадры Ethernet записываются в двухпортовую RAM. Затем микроконтроллер декодирует протокол и анализирует пакеты.Пакеты, относящиеся к поддержанию соединения, обрабатываются микроконтроллером и отвечают на них. Если пакет содержит видеоданные, микроконтроллер отправляет сообщение на FPGA, что данные должны быть доставлены в треугольник. ПЛИС проверяет пакетные данные, решает, к какому пятиугольнику они принадлежат, и ставит их в очередь для передачи по одному из своих 11 выходных каналов к пятиугольникам. После доставки пакета в треугольник FPGA отправляет сообщение микроконтроллеру, информируя его о том, что данные отсутствуют и данная область двухпортовой RAM может быть освобождена.
Если треугольник отправляет какие-то данные, то FPGA сохраняет сообщение во временной внутренней памяти и после передачи сигнала микроконтроллеру о наличии сообщения. Когда микроконтроллер указывает, что он готов, сообщение передается ему через двухпортовую RAM.
Связь между FPGA на распределительной плате и FPGA на треугольниках использует дифференциальную передачу сигналов. Скорость передачи данных составляет 10 Мбит / с, а сигнал подвергается так называемому манчестерскому кодированию.Эта скорость и кодирование данных используются стандартом 10BASE-T Ethernet, который упрощает использование недорогих разъемов Ethernet, магнитов и кабелей. Хотя скорость передачи данных и метод кодирования одинаковы, протокол, который использует Antarium, намного проще, чем Ethernet. Каждый фрейм данных начинается с преамбулы, за которой следует байт синхронизации, за которым следует байт, который указывает тип пакета и его адресат (или исходный треугольник) внутри пятиугольника. Следующий байт содержит дополнительную информацию о содержимом пакета.Данные следуют, и пакет завершается проверкой целостности данных длиной два байта. Этот протокол достаточно прост, поэтому с ним могут справиться даже ограниченные в ресурсах ПЛИС на панелях.
Скорость передачи данных составляет 10 Мбит / с, а сигнал подвергается так называемому манчестерскому кодированию.Эта скорость и кодирование данных используются стандартом 10BASE-T Ethernet, который упрощает использование недорогих разъемов Ethernet, магнитов и кабелей. Хотя скорость передачи данных и метод кодирования одинаковы, протокол, который использует Antarium, намного проще, чем Ethernet. Каждый фрейм данных начинается с преамбулы, за которой следует байт синхронизации, за которым следует байт, который указывает тип пакета и его адресат (или исходный треугольник) внутри пятиугольника. Следующий байт содержит дополнительную информацию о содержимом пакета.Данные следуют, и пакет завершается проверкой целостности данных длиной два байта. Этот протокол достаточно прост, поэтому с ним могут справиться даже ограниченные в ресурсах ПЛИС на панелях.
Конфигурационный битовый поток FPGA распределительной платы хранится на карте micro-SD. На плате есть гнездо для SD-карты, которым управляет микроконтроллер. Контроллер реализует протокол SD-карты, а также файловую систему Microsoft FAT, поэтому битовый поток FPGA может быть записан на карту с любого компьютера.Когда плата включена, она сначала считывает SD-карту и загружает битовый поток в FPGA.
Контроллер реализует протокол SD-карты, а также файловую систему Microsoft FAT, поэтому битовый поток FPGA может быть записан на карту с любого компьютера.Когда плата включена, она сначала считывает SD-карту и загружает битовый поток в FPGA.
Из сетевого стека TCP / IP микропрограмма микроконтроллера также реализует UDP (протокол пользовательских дейтаграмм), IP (интернет-протокол) и ARP (протокол разрешения адресов). Это необходимые и достаточные компоненты для связи с машиной со стандартным сетевым стеком, независимо от операционной системы, которую он запускает.
Распределительная плата также выполняет второстепенную функцию: программирование ПЛИС на треугольниках.ПЛИС на распределительной плате забывает свою конфигурацию при выключении питания. Когда плата включена, микроконтроллеру необходимо загрузить конфигурацию с SD-карты. ПЛИС на треугольнике имеет встроенную энергонезависимую память для хранения своей конфигурации, поэтому она просыпается полностью настроенной. Однако сначала необходимо запрограммировать конфигурацию в энергонезависимой памяти. Xilinx предлагает бесплатный инструмент для этого, но он был медленным и ненадежным. К счастью, алгоритм программирования можно было реконструировать из различных примечаний к применению (технических консультативных статей).Затем мы создали нашу реализацию алгоритма на распределительной плате, и она может запрограммировать ПЛИС треугольника за несколько секунд со 100% надежностью.
Однако сначала необходимо запрограммировать конфигурацию в энергонезависимой памяти. Xilinx предлагает бесплатный инструмент для этого, но он был медленным и ненадежным. К счастью, алгоритм программирования можно было реконструировать из различных примечаний к применению (технических консультативных статей).Затем мы создали нашу реализацию алгоритма на распределительной плате, и она может запрограммировать ПЛИС треугольника за несколько секунд со 100% надежностью.
Распределительная плата питается от имеющегося в продаже модуля питания 12 В (plug-pack). Фактические напряжения питания для электроники генерируются из этих 12 В с помощью двойного импульсного регулятора LT3824 (линейная технология). Для облегчения разработки программного обеспечения и начального программирования плата также содержит последовательный порт RS-232.
Инструменты дизайна
Все проектные работы выполнялись на компьютере под управлением операционной системы GNU / Linux с открытым исходным кодом. В помощь инжинирингу было написано несколько программ для расчета или оптимизации определенных параметров, для помощи в отладке или для автоматизации задач. Все эти программы были написаны либо на языке C, либо на языке Tcl. Tcl / Tk — это интерпретируемый язык сценариев с открытым исходным кодом и графическими возможностями. Программы на C были скомпилированы с использованием набора инструментов gcc с открытым исходным кодом.Создание окончательного двоичного изображения или битового потока контролировалось инструментом gmake с открытым исходным кодом. Распределенная система контроля версий Fossil с открытым исходным кодом использовалась для отслеживания изменений во время разработки.
В помощь инжинирингу было написано несколько программ для расчета или оптимизации определенных параметров, для помощи в отладке или для автоматизации задач. Все эти программы были написаны либо на языке C, либо на языке Tcl. Tcl / Tk — это интерпретируемый язык сценариев с открытым исходным кодом и графическими возможностями. Программы на C были скомпилированы с использованием набора инструментов gcc с открытым исходным кодом.Создание окончательного двоичного изображения или битового потока контролировалось инструментом gmake с открытым исходным кодом. Распределенная система контроля версий Fossil с открытым исходным кодом использовалась для отслеживания изменений во время разработки.
Схема входа и дизайн печатной платы для треугольников и распределительной платы были выполнены с использованием коммерческого пакета Eagle EDA от CadSoft GmbH (недавно приобретенного Autodesk), версия 6.4, профессиональная версия, для Linux. Файлы изготовления печатных плат были визуально проверены с помощью инструмента просмотра Gerber с открытым исходным кодом gebv.
Код для FPGA был написан на языке описания оборудования Verilog. Для логического моделирования использовались симулятор с открытым исходным кодом Icarus Verilog и программа просмотра сигналов с открытым исходным кодом GtkWave. Логический синтез, отображение технологий, создание маршрутов и битовых потоков выполнялись с помощью набора инструментов ISE 14.7 от Xilinx, Inc. Инструмент имеет закрытый исходный код, но Xilinx предоставляет его бесплатно.
Прошивка микроконтроллера на плате распределителя написана на языке C.Код был скомпилирован с использованием gcc в конфигурации кросс-компилятора. Библиотека Armlib с открытым исходным кодом от Bendor Research Pty. Limited использовалась для большинства низкоуровневых функций и планировщика задач. Драйвер Ethernet, драйвер SD-карты и файловая система FAT использовали процедуры, предоставленные Arthur Digital Solutions Kft (Венгрия).
Подбор компонентов, закупка, изготовление и сборка печатных плат были заказаны у Albacom Kft (Венгрия). Контроль качества и тщательное тестирование плат перед отправкой в Австралию бесплатно выполняла компания Arthur Digital Solutions.
Контроль качества и тщательное тестирование плат перед отправкой в Австралию бесплатно выполняла компания Arthur Digital Solutions.
Механический дизайн и изготовление строительных лесов были выполнены в мастерской ANU. Силовые кабели изготавливались вручную; Кабели, провода и разная электроника были приобретены в местном магазине электроники Jaycar.
3D-рендеринг и драйверы
Программное обеспечение, генерирующее видеопоток для проектора, использует коммерчески доступный механизм трехмерного (3D) рендеринга Unity (Unity Technologies), работающий в Microsoft Windows @ .Основным рынком для движка являются компьютерные игры, поэтому он лучше всего подходит для плоских проекций. Antarium имеет низкое количество пикселей по сравнению с большинством коммерческих видеоигр, поэтому на современных видеокартах можно одновременно отображать шесть или более просмотров игр с высокой частотой кадров. Шесть видов имеют одинаковое положение камеры в виртуальном трехмерном мире, но камеры смотрят в шести ортогональных направлениях (вверх, вниз, влево, вправо, вперед и назад), по сути создавая проекцию на куб. Пользовательский шейдер использует сферическое преобразование, известное как отображение куба, для отображения пикселей нашего визуализированного куба на любую произвольную 3D-модель. Применяя этот шейдер к 3D-модели, которая представляет каждый светодиод в Антариуме как отдельную грань, с тем же азимутом и возвышением, что и реальные координаты светодиода, мы можем визуализировать сцену так, как она выглядела бы при проецировании на Антариум. Затем мы используем вычислительный шейдер для сэмплирования каждой грани нашего виртуального Антариума, используя его нормаль в качестве поиска в теперь сферической кубической карте (с использованием функции DirectX SampleLevel).Наконец, мы кодируем и упаковываем их как данные пикселей для отправки по UDP на распределительную плату.
Антариум предназначен для демонстрации видов естественной среды обитания животных (рис. 1E). Поэтому мы построили трехмерную модель этой среды обитания, используя методы реконструкции с помощью камеры (см. Stürzl et al. , 2015; Murray and Zeil, 2017). Тысячи фотографий были сделаны камерой Panasonic Lumix DMC-FZ200 с разрешением 4000 × 3000 пикселей во время прогулки по местности, окружающей гнезда экспериментальных муравьев.Множественные воксельные облака были созданы из этих фотографий с помощью программного обеспечения Pix4D (Pix4D SA) и экспортированы как 3D-модели перед объединением в единую унифицированную и выровненную 3D-реконструкцию среды кормления муравьев. Поскольку очень удаленная панорама не имеет достаточного параллакса для обработки программой 3D-реконструкции, мы добавили удаленную панораму позже в качестве статического фонового изображения на расстоянии 1 км (приблизительно бесконечное). Мы сделали эту панораму с помощью панорамной камеры Ricoh Theta S (Ricoh Company Limited, Токио, Япония).
, 2015; Murray and Zeil, 2017). Тысячи фотографий были сделаны камерой Panasonic Lumix DMC-FZ200 с разрешением 4000 × 3000 пикселей во время прогулки по местности, окружающей гнезда экспериментальных муравьев.Множественные воксельные облака были созданы из этих фотографий с помощью программного обеспечения Pix4D (Pix4D SA) и экспортированы как 3D-модели перед объединением в единую унифицированную и выровненную 3D-реконструкцию среды кормления муравьев. Поскольку очень удаленная панорама не имеет достаточного параллакса для обработки программой 3D-реконструкции, мы добавили удаленную панораму позже в качестве статического фонового изображения на расстоянии 1 км (приблизительно бесконечное). Мы сделали эту панораму с помощью панорамной камеры Ricoh Theta S (Ricoh Company Limited, Токио, Япония).
Эта процедура позволяет нам захватывать виды из нашей 3D-модели или из проекций панорамных фотографий, редактировать 3D-модель (с помощью Blender) или фотографии для исправления ошибок (с помощью Paint. net) и, наконец, создавать экспериментальные обработки ( с использованием Unity3D). Например, муравьев Myrmecia муравьев регулярно посещают деревья в поисках пищи (например, Narendra et al., 2013; Reid et al., 2013; Jayatilaka et al., 2014), и теперь мы можем извлечь такие кормовые деревья по фотографии и Трехмерная модель, позволяющая перемещать кормовое дерево в любое произвольное место или в любую точку модели / фотографии, когда муравей просматривает сцену внутри Антариума.Затем мы можем спросить, относятся ли муравьи к деревьям как к отдельным ориентирам-маякам или же они ориентируются на всю панораму ориентира.
net) и, наконец, создавать экспериментальные обработки ( с использованием Unity3D). Например, муравьев Myrmecia муравьев регулярно посещают деревья в поисках пищи (например, Narendra et al., 2013; Reid et al., 2013; Jayatilaka et al., 2014), и теперь мы можем извлечь такие кормовые деревья по фотографии и Трехмерная модель, позволяющая перемещать кормовое дерево в любое произвольное место или в любую точку модели / фотографии, когда муравей просматривает сцену внутри Антариума.Затем мы можем спросить, относятся ли муравьи к деревьям как к отдельным ориентирам-маякам или же они ориентируются на всю панораму ориентира.
Система трекбола
Муравьев помещают на легкий трекбол диаметром 10 см с воздушной подушкой (рис. 1B, C), на котором они могут свободно вращаться вокруг оси рыскания, но это позволяет нам записывать их предполагаемые поступательные движения, как подробно описано. Автор: Dahmen et al. (2017; см. Также Murray et al., 2020). Трекбол отправляет данные о положении на компьютер визуализации через USB. В отличие от оригинала, мы теперь поддерживаем и компилируем код трекбола с помощью Microsoft Visual Studio на языке C (Microsoft Inc. 20XX). USB-соединение зависит от библиотеки usblib с открытым исходным кодом. Реакция системы линейна до скорости 1,2 м / с (подробные характеристики системы см. Dahmen et al., 2017).
В отличие от оригинала, мы теперь поддерживаем и компилируем код трекбола с помощью Microsoft Visual Studio на языке C (Microsoft Inc. 20XX). USB-соединение зависит от библиотеки usblib с открытым исходным кодом. Реакция системы линейна до скорости 1,2 м / с (подробные характеристики системы см. Dahmen et al., 2017).
Поскольку трекбол подключен к компьютеру, на котором запущен 3D-движок, мы можем использовать данные о движении, которые он генерирует, для обновления положения наших виртуальных камер в 3D-мире, тем самым предоставляя нашим объектам-муравьям управление визуальной сценой по замкнутому циклу.При работе в разомкнутом цикле 3D-сцены или панорамы могут быть представлены статически или последовательно. Для замкнутого цикла мы используем Kernel32 для совместного использования файла в общей памяти между программой трекбола и игровым движком. В этом файле мы записываем текущее смещение трекбола от его начального положения и принимаем команды для сброса начального положения, например, когда начинается новое лечение. В обоих режимах человек-оператор или его код могут произвольно изменять виртуальное положение и направление муравья в любое время.Однако в режиме замкнутого контура это смещение трекбола можно использовать для обновления положения шести камер внутри 3D-модели, таким образом обновляя вид, который представляется субъекту-муравью, на основе его движения по трекболу. Следует отметить, что из-за сложности этой установки необходимо уделять особое внимание тому, чтобы все объекты реального и виртуального мира были выровнены по вращению, чтобы визуальные последствия движений муравья были точно представлены.
В обоих режимах человек-оператор или его код могут произвольно изменять виртуальное положение и направление муравья в любое время.Однако в режиме замкнутого контура это смещение трекбола можно использовать для обновления положения шести камер внутри 3D-модели, таким образом обновляя вид, который представляется субъекту-муравью, на основе его движения по трекболу. Следует отметить, что из-за сложности этой установки необходимо уделять особое внимание тому, чтобы все объекты реального и виртуального мира были выровнены по вращению, чтобы визуальные последствия движений муравья были точно представлены.
Антариум Камера
Чтобы записать в дополнение к предполагаемым путям муравьев также сканирование движений их головы, мы установили камеру Raspberry-Pi V1 на вершине Антариума.Камера подключена к одноплатному компьютеру Raspberry-Pi (Raspberry Pi Foundation, Великобритания). Он записывает видео с разрешением 1280 × 960 пикселей со скоростью 30 кадров в секунду на внешний USB-диск (рисунок 1C). Формат записи не может быть воспроизведен с помощью имеющегося в продаже программного обеспечения в Windows, поэтому записанный материал транскодируется в формат MP4 с использованием пакета ffmpeg с открытым исходным кодом на компьютере Linux.
Формат записи не может быть воспроизведен с помощью имеющегося в продаже программного обеспечения в Windows, поэтому записанный материал транскодируется в формат MP4 с использованием пакета ffmpeg с открытым исходным кодом на компьютере Linux.
Подтверждение концепции
На сегодняшний день мы провели несколько экспериментов, демонстрирующих, что муравьи распознают знакомые сцены в Антариуме и получают из них навигационные инструкции.Мы представим эти поведенческие результаты в отдельной публикации. Вкратце, мы столкнулись с муравьями, привязанными к трекболу, с четырех разных точек зрения (рис. 4A): знакомый вид на полпути к дереву вдоль их обычного коридора кормежки ( Familiar ), вид из гнезда ( Nest ), незнакомый вид с места на расстоянии примерно 5 м от кормового коридора ( Неизвестный ) и сцена, состоящая только из линии горизонта ( Неструктурированный ). Когда муравьи ходили по трекболу в этих четырех ситуациях, мы мгновенно вращали сцены несколько раз на 90 градусов в случайном порядке по или против часовой стрелки, чтобы проверить, заметили ли насекомые информацию о панораме. Они действительно изменили направление пути в ответ на такие повороты при столкновении с любой из структурированных, но не неструктурированных сцен, как показано для двух примеров знакомой сцены на Рисунке 4B ( Знакомый ) и Рисунках 4C ( Неструктурированный ), причем Сегменты длиной 15 с до вращений, помеченные красным, и отрезки по 15 с после поворотов, помеченные синим. Случаи поворотов отмечены синей точкой. Обратите внимание, что скорость муравьев непостоянна, но указывает на то, что муравьи движутся рывками (рисунки 4B, C) и что направление их пути колеблется с меньшими амплитудами при столкновении со знакомой сценой и большими амплитудами при столкновении с неструктурированной сценой.
Они действительно изменили направление пути в ответ на такие повороты при столкновении с любой из структурированных, но не неструктурированных сцен, как показано для двух примеров знакомой сцены на Рисунке 4B ( Знакомый ) и Рисунках 4C ( Неструктурированный ), причем Сегменты длиной 15 с до вращений, помеченные красным, и отрезки по 15 с после поворотов, помеченные синим. Случаи поворотов отмечены синей точкой. Обратите внимание, что скорость муравьев непостоянна, но указывает на то, что муравьи движутся рывками (рисунки 4B, C) и что направление их пути колеблется с меньшими амплитудами при столкновении со знакомой сценой и большими амплитудами при столкновении с неструктурированной сценой.
Рисунок 4 . Доказательство концептуальных экспериментов. (A) Четыре панорамных вида из мест, где пасутся муравьи. Фамильяр находится в коридоре, в котором муравьи собирают пищу, на полпути к их дереву корма; Гнездо — вид со стороны входа в муравейник; Неизвестный , если вид с места примерно в 5 м сбоку от кормового коридора, и Неструктурированный — синтетический вид без панорамы ориентира. (B) Два примера (слева и справа) муравьев, реагирующих на знакомые повороты сцены.Случаи поворотов отмечены синими точками на панели направления пути (верхняя) и скорости (нижняя панель). Пятнадцатисекундные сегменты до (красный) и после вращения (синий) также отмечены на предполагаемых путях муравьев (показаны слева) и во времени направления пути (верхние панели). Пути показаны в системе координат трекбола. (C) То же, что (B) , но с неструктурированной сценой. Обратите внимание на разницу в колебаниях направления пути в (B, C) .
(B) Два примера (слева и справа) муравьев, реагирующих на знакомые повороты сцены.Случаи поворотов отмечены синими точками на панели направления пути (верхняя) и скорости (нижняя панель). Пятнадцатисекундные сегменты до (красный) и после вращения (синий) также отмечены на предполагаемых путях муравьев (показаны слева) и во времени направления пути (верхние панели). Пути показаны в системе координат трекбола. (C) То же, что (B) , но с неструктурированной сценой. Обратите внимание на разницу в колебаниях направления пути в (B, C) .
В качестве другого примера реакции на знакомые повороты сцены (рис. 5) мы извлекли ориентацию головы и продольной оси тела муравья из отснятого камерой Antarium кадра за 15 с до и через 15 с после поворота (рис. 5B). После поворота движения головы и тела муравья при сканировании имеют тенденцию увеличиваться (рис. 5В), поскольку он меняет направление своего движения в трех случаях, когда он реагировал на поворот.
Рисунок 5 . Доказательство концептуальных экспериментов. (A) Путь (слева), временной ход направления пути (справа вверху) и временной ход скорости (справа внизу) для муравья в присутствии знакомого вида. Последовательные случаи поворота сцены отмечены синими точками и пронумерованы. В остальном условные обозначения, как на рисунке 4. (B) Верхний ряд: взгляд (голова, оранжевый) и продольная ориентация тела (синий) во времени от 15 секунд до и 15 секунд после поворота 2–4. Нижний ряд: ориентация головы относительно продольной оси тела для тех же сегментов.Вертикальной черной линией отмечен момент вращения.
Outlook
Антариум — это уникальная реконструированная арена визуальной реальности для муравьев. Ни одна проекционная система до этого не предлагала полностью панорамную проекцию, настроенную на зрение насекомого, включая произвольные поляризационные диаграммы. Кроме того, Антариум может точно воспроизводить визуальную реальность животных, проецируя изображения, снятые из их естественной среды обитания, а не искусственно созданные сцены (например,г. , Stowers et al., 2017; Каушик и др., 2020). Мы считаем способность представлять естественные виды, знакомые насекомым, как важное условие для ответа на многие вопросы о нейронных механизмах, лежащих в основе визуальной навигации.
, Stowers et al., 2017; Каушик и др., 2020). Мы считаем способность представлять естественные виды, знакомые насекомым, как важное условие для ответа на многие вопросы о нейронных механизмах, лежащих в основе визуальной навигации.
Антариум не только позволяет нам сравнивать реакции на знакомые и незнакомые природные сцены, но мы также можем добавлять, удалять или перемещать ориентиры, настраивать конфликты между различной визуальной информацией (например, небесной и земной) и управлять интенсивностью, цвет или пространственно-частотная композиция сцен.В замкнутом цикле мы можем исследовать динамику визуальной навигации, такую как взаимосвязь между навигационными решениями и движениями сканирования или частоту, с которой муравьи проверяют и обновляют свое направление движения.
С момента зарождения Антариума было сделано много успехов, как в разработке светодиодов, так и в наших знаниях о нейронных и зрительных системах муравьев. Эти достижения в сочетании с уроками, извлеченными из наших экспериментов с Антариумом, привели нас к разработке второй версии, Антариум Марк II, улучшающей оригинал. Например, теперь мы знаем, что спектральная чувствительность фоторецепторов Myrmecia как у активных дневных, так и у ночных видов имеет максимальную чувствительность около 375, 430 и 550 нм (рис. 2C; Ogawa et al., 2015). Поскольку светодиоды с расширенным излучением в УФ-диапазоне стали доступны и резко снизились в стоимости, теперь мы можем гораздо точнее согласовывать светодиоды по спектральной чувствительности и увеличивать плотность УФ-светодиодов. Таким образом, Antarium Mark II обеспечит значительно улучшенный УФ-контраст панорамы ориентира, что, как было показано теоретически и в поведенческих экспериментах, важно для предоставления информации о направлении движения (например,г., Мёллер, 2002; Коллмайер и др., 2007; Грэм и Ченг, 2009 г .; Stone et al., 2014, 2016; Дифферт и Мёллер, 2015; Schultheiss et al., 2016).
Например, теперь мы знаем, что спектральная чувствительность фоторецепторов Myrmecia как у активных дневных, так и у ночных видов имеет максимальную чувствительность около 375, 430 и 550 нм (рис. 2C; Ogawa et al., 2015). Поскольку светодиоды с расширенным излучением в УФ-диапазоне стали доступны и резко снизились в стоимости, теперь мы можем гораздо точнее согласовывать светодиоды по спектральной чувствительности и увеличивать плотность УФ-светодиодов. Таким образом, Antarium Mark II обеспечит значительно улучшенный УФ-контраст панорамы ориентира, что, как было показано теоретически и в поведенческих экспериментах, важно для предоставления информации о направлении движения (например,г., Мёллер, 2002; Коллмайер и др., 2007; Грэм и Ченг, 2009 г .; Stone et al., 2014, 2016; Дифферт и Мёллер, 2015; Schultheiss et al., 2016).
Заявление о доступности данных
Необработанные данные, подтверждающие выводы этой статьи, будут предоставлены авторами без излишних оговорок. По вопросам проектирования и строительства обращайтесь в ZK ([email protected]).
По вопросам проектирования и строительства обращайтесь в ZK ([email protected]).
Авторские взносы
ЗК: разработан дизайн, архитектура, электроника и программное обеспечение; контролируемое производство; проводили тесты и поведенческие эксперименты; и написал первый черновик рукописи.TM: провел 3D-моделирование и разработал программное обеспечение для рендеринга и интерфейсный конвейер с Антариумом; проводились тесты и поведенческие эксперименты. HD: предусмотрена система трекбола и обучение. AN: провел первые эксперименты с системой трекбола и предоставил финансирование. JZ: надзор за проектом и предоставление финансирования. Все авторы внесли свой вклад в несколько редакций рукописи. Все авторы внесли свой вклад в статью и одобрили представленную версию.
Финансирование
Мы признательны за финансовую поддержку Грантам проекта Discovery Австралийского исследовательского совета (ARC) (DP150101172 и DP150102699), стипендиату ARC Future Fellowship (FT140100221), Фонду Хермона Слейда (HSF 10/7), Эндаумент-фонду Австралийского национального университета и частному финансированию. .Мы благодарны Кену Ченгу за предоставление первоначального финансирования на начальном этапе этого проекта. Часть работы TM была поддержана правительством Австралии, через грант AUSMURIB000001, связанный с грантом ONR MURI N00014-19-1-2571.
Конфликт интересов
ZK — директор Bendor Research Pty. Limited, консалтинговой компании по встроенным системам. Чтобы снизить затраты, существующие контакты компании использовались при поиске компонентов и производстве Антариума, а его испытательное оборудование использовалось во время разработки.Bendor Research не взимает плату за свои услуги и не получает никакой финансовой или иной выгоды от их предоставления.
Остальные авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Мы благодарны механической мастерской Исследовательской школы биологии за создание корпуса для устройства трекбола и каркаса для панелей Antarium, а также Джесси Уоллеса за предоставление малиновой камеры.
Сокращения
FPGA, программируемая вентильная матрица; ШИМ, широтно-импульсная модуляция; PCB, печатная плата; SPI, последовательное периферийное соединение; UDP, протокол пользовательских дейтаграмм.
Сноски
- Двухцветная (зеленая и синяя) версия этого устройства в настоящее время коммерчески доступна, а также разрабатывается трехцветное (зеленый, синий и УФ) устройство (Майкл Б. Райзер, личное сообщение).
Список литературы
Ардин, П., Пэн, Ф., Манган, М., Лагогианнис, К., Уэбб, Б. (2016). Использование схемы тела насекомого-гриба для кодирования памяти маршрута в сложных природных условиях. PLoS Comput. Биол. 12: e1004683. DOI: 10.1371 / journal.pcbi.1004683
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Бадделей Б., Грэм П., Мужья П. и Филиппидес А. (2012). Модель навигации по маршруту муравьев, основанная на знакомстве со сценой. PLoS Comput. Биол. 8: e1002336. DOI: 10.1371 / journal.pcbi.1002336
DOI: 10.1371 / journal.pcbi.1002336
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Боеддекер Н., Линдеманн Дж. П., Эгельхааф М. и Цейл Дж. (2005). Ответы чувствительных к движению нейронов мясной мухи на реконструированный оптический поток вдоль траекторий полета на открытом воздухе. J. Comp. Physiol. Нейроэтол. Sens. Neural Behav. Physiol. 191, 1143–1155. DOI: 10.1007 / s00359-005-0038-9
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Бюльманн, К., Возняк, Б., Гулард, Р., Уэбб, Б., Грэм, П., и Нивен, Дж. Э. (2020). Грибные тела необходимы для усвоенной визуальной навигации, но не для врожденного визуального поведения муравьев. Curr. Биол. 30, 3438.e2–3443.e2. DOI: 10.1016 / j.cub.2020.07.013
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Дахмен, Х. Дж., Валь, В. Л., Пфеффер, С. Э., Маллот, Х. А., и Виттлингер, М. (2017). Натуралистическая интеграция муравьев пустыни Cataglyphis на легкой сферической беговой дорожке с воздушной подушкой. J. Exp. Биол. 220, 634–644. DOI: 10.1242 / jeb.148213
J. Exp. Биол. 220, 634–644. DOI: 10.1242 / jeb.148213
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Дифферт Д., Мёллер Р. (2015). Модели насекомых с инвариантной к освещению экстракцией линий горизонта из УФ и зеленых каналов. J. Theor. Биол. 380, 444–462. DOI: 10.1016 / j.jtbi.2015.06.020
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Дифферт Д., Стюрцль В. (2020). Обобщенная модель с несколькими снимками для трехмерного самонаведения и следования по маршруту. Адапт. Behav. DOI: 10.1177 / 10597123207 [Epub перед печатью].
CrossRef Полный текст | Google Scholar
Дюпейру Дж., Серрес Дж. И Виолле С. (2018). «Шагающий робот-гексапод, имитирующий навигационные стратегии пустынных муравьев Cataglyphis », в Biomimetic and Biohybrid Systems, 7-я Международная конференция, Living Machines , Париж, Франция, 145–156.
Google Scholar
Флейшманн, П. Н., Гроб, Р., Мюллер, В.Л., Венер Р. и Рёсслер В. (2018). Геомагнитное поле — это компасный ориентир в навигации муравьев Cataglyphis . Curr. Биол. 28, 1440.e2–1444.e2. DOI: 10.1016 / j.cub.2018.03.043
Н., Гроб, Р., Мюллер, В.Л., Венер Р. и Рёсслер В. (2018). Геомагнитное поле — это компасный ориентир в навигации муравьев Cataglyphis . Curr. Биол. 28, 1440.e2–1444.e2. DOI: 10.1016 / j.cub.2018.03.043
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Фрай, С. Н., Мюллер, П., Бауман, Х.-Дж., Стро, А. Д., Бихсел, М., и Роберт, Д. (2004). Контекстно-зависимое представление стимулов свободно движущимся животным в 3D. J. Neurosci. Методы 135, 149–157. DOI: 10.1016 / j.jneumeth.2003.12.012
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Фрай, С. Н., Рорзейтц, Н., Стро, А. Д., и Дикинсон, М. Х. (2008). TrackFly: виртуальная реальность для анализа системного поведения свободно летающих плодовых мух. J. Neurosci. Методы 171, 110–117. DOI: 10.1016 / j.jneumeth.2008.02.016
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Гканиас Э., Рисе Б., Манган М. и Уэбб Б. (2019). От входа в световой люк до поведенческого выхода: вычислительная модель компаса с поляризованным светом насекомых. PLoS Comput. Биол. 15: e1007123. DOI: 10.1371 / journal.pcbi.1007123
PLoS Comput. Биол. 15: e1007123. DOI: 10.1371 / journal.pcbi.1007123
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Грей, Дж. Р., Павловски, В., Уиллис, М. А. (2002). Метод регистрации поведения и мультинейронной активности ЦНС привязанных насекомых, летающих в виртуальном пространстве. J. Neurosci. Методы 120, 211–223. DOI: 10.1016 / s0165-0270 (02) 00223-6
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Джаятилака, П., Мюррей Т., Нарендра А. и Цейл Дж. (2018). Хореография обучающих прогулок в австралийском джек-джемпере ant Myrmecia croslandi . J. Exp. Биол. 221: jeb185306. DOI: 10.1242 / jeb.185306
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Джаятилака П., Нарендра А., Рид С. Ф., Купер П. и Цейл Дж. (2011). Различные эффекты температуры на режимы кормодобывания симпатрических муравьев Myrmecia . J. Exp.Биол. 214, 2730–2738. DOI: 10. 1242 / jeb.053710
1242 / jeb.053710
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Джаятилака П., Радершалл А. К., Нарендра А. и Цейл Дж. (2014). Индивидуальные схемы кормления муравьев-прыгунов Myrmecia croslandi ( Hymenoptera: Formicidae ). Myrmecol. Новости 19, 75–83.
Google Scholar
Камхи, Дж. Ф., Бэррон, А. Б., и Нарендра, А. (2020). Вертикальные лепестки грибовидных тел необходимы для навигации на основе обзора у австралийских муравьев Myrmecia . Curr. Биол. 30, 3432.e3–3437.e3. DOI: 10.1016 / j.cub.2020.06.030
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Каушик, П. К., Ренц, М., и Олссон, С. Б. (2020). Описание поведения дальнего поиска в Diptera с использованием сложных трехмерных виртуальных сред. Proc. Natl. Акад. Sci. США 117, 12201–12207. DOI: 10.1073 / pnas.14117
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Кнаден, М. , и Грэм, П.(2016). Сенсорная экология навигации муравьев: от естественной среды до нервных механизмов. Annu. Преподобный Энтомол. 61, 63–76. DOI: 10.1146 / annurev-ento-010715-023703
, и Грэм, П.(2016). Сенсорная экология навигации муравьев: от естественной среды до нервных механизмов. Annu. Преподобный Энтомол. 61, 63–76. DOI: 10.1146 / annurev-ento-010715-023703
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Кениг, С., Вольф, Р., и Гейзенберг, М. (2016). Визуальное внимание у мух — дофамин в грибовидных телах опосредует последействие сигнала. PLoS One 11: e0161412. DOI: 10.1371 / journal.pone.0161412
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Коллмайер, Т., Ребен, Ф., Шенк, В., и Мёллер, Р. (2007). Спектральные контрасты для ориентировочной навигации. J. Opt. Soc. Являюсь. Опт. Image Sci. Vis. 24, 1–10. DOI: 10.1364 / josaa.24.000001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ламбринос, Д., Мёллер, Р., Лабхарт, Т., Пфайфер, Р., и Венер, Р. (2000). Мобильный робот, использующий для навигации стратегии насекомых. Робот. Auton. Syst. 30, 39–64. DOI: 10.1016 / s0921-8890 (99) 00064-0
30, 39–64. DOI: 10.1016 / s0921-8890 (99) 00064-0
CrossRef Полный текст | Google Scholar
Ле Мёл, Ф., и Wystrach, A. (2020). Противоборствующие процессы в зрительных воспоминаниях: модель притяжения и отталкивания при перемещении по грибовидным телам насекомых. PLoS Comput. Биол. 16: e1007631. DOI: 10.1371 / journal.pcbi.1007631
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Линдеманн, Дж. П., Керн, Р., Михаэлис, К., Мейер, П., ван Хатерен, Дж. Х. и Эгельхааф, М. (2003). FliMax, новое стимулирующее устройство для панорамного и высокоскоростного представления поведенчески генерируемого оптического потока. Vision Res. 43, 779–791. DOI: 10.1016 / s0042-6989 (03) 00039-7
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Мюррей Т., Кочи З., Дамен Х.-Дж., Нарендра А., Ле Мёл Ф., Вистрах А. и др. (2020). Роль привлекательных и отталкивающих воспоминаний о сценах в поисках муравьев ( Myrmecia crolandi ). J. Exp. Биол. 223: jeb210021. DOI: 10.1242 / jeb.210021
J. Exp. Биол. 223: jeb210021. DOI: 10.1242 / jeb.210021
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Мюррей, Т., и Цейл, Дж. (2017). Количественная оценка навигационной информации: объемы охвата панорамных снимков на открытом воздухе. PLoS One 12: e0187226. DOI: 10.1371 / journal.pone.0187226
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Нарендра А., Гурмо С. и Цейл Дж. (2013). Отображение навигационных знаний отдельных муравьев, добывающих пищу Myrmecia croslandi . Proc. Биол. Sci. 280: 20130683. DOI: 10.1098 / rspb.2013.0683
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Нарендра, А., Reid, S.F., Greiner, B., Peters, R.A., Hemmi, J.M., Ribi, W., et al. (2011). Зрительная адаптация касты к разным графикам повседневной активности у австралийских муравьев Myrmecia . Proc. Биол. Sci. 278, 1141–1149. DOI: 10.1098 / rspb.2010.1378
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Огава Ю. , Фальковски М., Нарендра А., Цейл Дж. И Хемми Дж. М. (2015). Три спектрально различных фоторецептора у австралийских муравьев, ведущих дневной и ночной образ жизни. Proc. Биол. Sci. 282: 20150673. DOI: 10.1098 / rspb.2015.0673
, Фальковски М., Нарендра А., Цейл Дж. И Хемми Дж. М. (2015). Три спектрально различных фоторецептора у австралийских муравьев, ведущих дневной и ночной образ жизни. Proc. Биол. Sci. 282: 20150673. DOI: 10.1098 / rspb.2015.0673
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Огава Ю., Райан Л. А., Палавалли-Неттими Р., Сигер О., Харт Н. С. и Нарендра А. (2019). Пространственная разрешающая способность и контрастная чувствительность адаптированы к условиям окружающего освещения у австралийских муравьев Myrmecia . Фронт. Ecol. Evol. 7:18. DOI: 10.3389 / fevo.2019.00018
CrossRef Полный текст | Google Scholar
Паульк, А.К., Стейси, Дж. А., Пирсон, Т. У., Тейлор, Дж. Дж., Мур, Р. Дж., Сринивасан, М. В. и др. (2014). Избирательное внимание зрительных долей пчелы предшествует выбору поведения. Proc. Natl. Акад. Sci. США 111, 5006–5011. DOI: 10.1073 / pnas.1323297111
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Пекмезиан Т.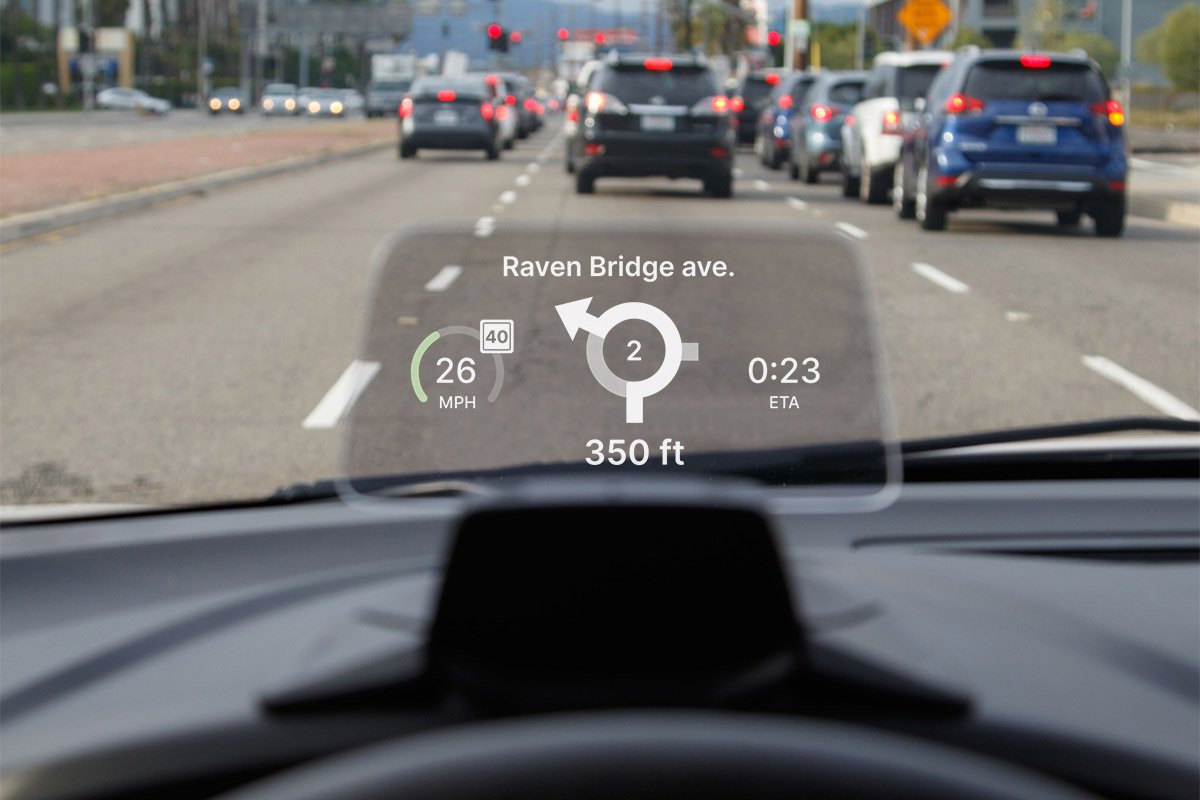 и Тейлор П. В. (2015). Парадигма виртуальной реальности для изучения визуально опосредованного поведения и познания у пауков. Anim. Behav. 107, 87–95. DOI: 10.1016 / j.anbehav.2015.06.018
и Тейлор П. В. (2015). Парадигма виртуальной реальности для изучения визуально опосредованного поведения и познания у пауков. Anim. Behav. 107, 87–95. DOI: 10.1016 / j.anbehav.2015.06.018
CrossRef Полный текст | Google Scholar
Рейд С. Ф., Нарендра А., Хемми Дж. М. и Цейл Дж. (2011). Поляризованный световой люк и панорама ориентира предоставляют ночным муравьям-быкам информацию компаса во время следования по маршруту. J. Exp. Биол. 214, 363–370. DOI: 10.1242 / jeb.049338
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Рейд, С. Ф., Нарендра, А., Тейлор, Р. У., и Цейл, Дж.(2013). Экология кормления ночного муравья-быка Myrmecia pyriformis . Aust. J. Zool. 61, 170–177. DOI: 10.1071 / zo13027
CrossRef Полный текст | Google Scholar
Сабо К., Чисхолм Р., Петтерсон А. и Коуп А. (2017). Легкая недорогая роботизированная система для наблюдения за насекомыми. Arthropod Struct. Dev. 46, 689–702. DOI: 10.1016 / j.asd.2017.08.001
DOI: 10.1016 / j.asd.2017.08.001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Schultheiss, P., Buatois, A., Avarguès-Weber, A., and Giurfa, M. (2017). Использование виртуальной реальности для изучения визуальных характеристик пчел. Curr. Opin. Insect Sci. 24, 43–50. DOI: 10.1016 / j.cois.2017.08.003
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Schultheiss, P., Wystrach, A., Schwarz, S., Tack, A., Delor, J., Nooten, S. S., et al. (2016). Решающая роль ультрафиолета для муравьев пустыни в определении направления с земной панорамы. Anim.Behav. 115, 19–28. DOI: 10.1016 / j.anbehav.2016.02.027
CrossRef Полный текст | Google Scholar
Шварц, С., Нарендра, А., Цейл, Дж. (2011). Свойства зрительной системы австралийского пустынного муравья Melophorus bagoti . Arthropod Struct. Dev. 40, 128–134. DOI: 10.1016 / j.asd.2010.10.003
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Стейнбек Ф. , Адден А. и Грэм П. (2020). Подключение мозга к поведению: роль управляющих схем общего назначения в ориентации насекомых? Дж.Exp. Биол. 223: jeb212332. DOI: 10.1242 / jeb.212332
, Адден А. и Грэм П. (2020). Подключение мозга к поведению: роль управляющих схем общего назначения в ориентации насекомых? Дж.Exp. Биол. 223: jeb212332. DOI: 10.1242 / jeb.212332
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Стоун, Т., Дифферт, Д., Милфорд, М., Уэбб, Б. (2016). «Локализация на основе горизонта для агрессивно маневрирующих роботов с использованием УФ-датчиков и сферических гармоник», в Международная конференция IEEE по робототехнике и автоматизации (ICRA) , Стокгольм, Швеция, 16–21.
Google Scholar
Стоун, Т., Манган, М., Ардин, П., и Уэбб, Б.(2014). Для навигации можно использовать сегментацию неба с использованием ультрафиолетовых изображений. Труды Робототехника: наука и системы 10:47. DOI: 10.15607 / RSS.2014.X.047
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Stone, T., Webb, B., Adden, A., Weddig, N. B., Honkanen, A., Templin, R., et al. (2017). Анатомически ограниченная модель интеграции путей в мозге пчелы. Curr. Биол. 27, 3069–3085. DOI: 10.1016 / j.cub.2017.08.052
Curr. Биол. 27, 3069–3085. DOI: 10.1016 / j.cub.2017.08.052
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Стоуэрс, Дж.R., Hofbauer, M., Bastien, R., Griessner, J., Higgins, P., Farooqui, S., et al. (2017). Виртуальная реальность для свободно перемещающихся животных. Nat. Методы 14, 995–1002. DOI: 10.1038 / Nmeth.4399
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Штраус Р., Шустер С. и Гётц К. Г. (1997). Обработка искусственной зрительной обратной связи у шагающей плодовой мухи Drosophila melanogaster . J. Exp. Биол. 200, 1281–1296.
PubMed Аннотация | Google Scholar
Stürzl, W., Гриша И., Маир Э., Нарендра А. и Цейл Дж. (2015). Трехмерные модели природных сред и отображение навигационной информации. J. Comp. Physiol. 201, 563–584. DOI: 10.1007 / s00359-015-1002-y
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Такало, Дж., Пийронен, А. , Хонканен, А., Лемпеа, М., Айкио, М., Туукканен, Т., и др. (2012). Быстрая и гибкая панорамная система виртуальной реальности для поведенческих и электрофизиологических экспериментов. Sci. Отчет 2: 324. DOI: 10.1038 / srep00324
, Хонканен, А., Лемпеа, М., Айкио, М., Туукканен, Т., и др. (2012). Быстрая и гибкая панорамная система виртуальной реальности для поведенческих и электрофизиологических экспериментов. Sci. Отчет 2: 324. DOI: 10.1038 / srep00324
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ван Де Полл, М. Н., Заячковски, Э. Л., Тейлор, Г. Дж., Сринивасан, М. В., и ван Свиндерен, Б. (2015). Использование абстрактной геометрии в виртуальной реальности для изучения поведения выбора: предпочтения визуального мерцания у пчел. J. Exp. Биол. 218, 3448–3460. DOI: 10.1242 / jeb.125138
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Венер, Р.(2020). Навигатор по пустыне. Путешествие муравья. Кембридж, Массачусетс: Издательство Гарвардского университета.
Google Scholar
Wystrach, A., Schwarz, S., Schultheiss, P., and Cheng, K. (2014). Множественные источники информации о небесном компасе в пустыне Центральной Австралии ant Melophorus bagoti . J. Comp. Physiol. 200, 591–601. DOI: 10.1007 / s00359-014-0899-x
J. Comp. Physiol. 200, 591–601. DOI: 10.1007 / s00359-014-0899-x
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Цайль, Дж., Нарендра А. и Стюрцль В. (2014). Взгляд и поиск: как перемещенные муравьи решают, куда идти. Philos. Пер. R. Soc. Лондон. B Biol. Sci. 369: 20130034. DOI: 10.1098 / rstb.2013.0034
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Цолликофер, К. П. Э., Венер, Р., Фукуши, Т. (1995). Оптическое масштабирование у муравьев вида Cataglyphis . J. Exp. Биол. 198, 1637–1646.
PubMed Аннотация | Google Scholar
Origami методом фронтальной фотополимеризации
Изгиб, вызванный усадкой
Процесс FPP был подтвержден путем ослабления инфракрасного спектра с преобразованием Фурье (FT-IR) полного отражения на верхней и нижней поверхности образцов, отвержденных облучением (интенсивность света 5 мВт · см -2 ) снизу.Результаты экспериментов, представленные на рис. S1 показывают, что (i) существует значительный градиент степени фотополимеризации по толщине образца и (ii) фронт фотополимеризации непрерывно перемещается со временем облучения. Подробные обсуждения можно найти в дополнительных материалах. Свойство отверждения акрилатной смолы было охарактеризовано тестированием фотополимеризованных тонких пленок (0,05 мм) с различным временем освещения при постоянной интенсивности 5 мВт / см -2 , и результаты также показаны в дополнительных материалах.Как показано на рис. S2B модуль Юнга образца увеличивается почти линейно с нормализованной степенью преобразования φ двойных связей C = C. Обратите внимание, что полностью отвержденная смола не переходит в стеклообразное состояние; следовательно, модуль Юнга показывает почти линейную функцию степени преобразования; это соотношение станет в высшей степени нелинейным после перехода в стеклообразное состояние. Значительная деформация усадки около 5% произошла после затвердевания, и ее изменение становилось намного слабее по мере протекания реакции (рис. S2C). Во время FPP (например, непрерывный рост полимерной пленки на рис. S2D), эволюция этих двух свойств может быть объединена для управления развитием поля внутренних напряжений.
S1 показывают, что (i) существует значительный градиент степени фотополимеризации по толщине образца и (ii) фронт фотополимеризации непрерывно перемещается со временем облучения. Подробные обсуждения можно найти в дополнительных материалах. Свойство отверждения акрилатной смолы было охарактеризовано тестированием фотополимеризованных тонких пленок (0,05 мм) с различным временем освещения при постоянной интенсивности 5 мВт / см -2 , и результаты также показаны в дополнительных материалах.Как показано на рис. S2B модуль Юнга образца увеличивается почти линейно с нормализованной степенью преобразования φ двойных связей C = C. Обратите внимание, что полностью отвержденная смола не переходит в стеклообразное состояние; следовательно, модуль Юнга показывает почти линейную функцию степени преобразования; это соотношение станет в высшей степени нелинейным после перехода в стеклообразное состояние. Значительная деформация усадки около 5% произошла после затвердевания, и ее изменение становилось намного слабее по мере протекания реакции (рис. S2C). Во время FPP (например, непрерывный рост полимерной пленки на рис. S2D), эволюция этих двух свойств может быть объединена для управления развитием поля внутренних напряжений.
 Толщина образца увеличивается с увеличением времени облучения, что аналогично результату на рис. S2D. Кривизны изгиба были измерены по нескольким цифрам, аналогичным фиг. 2A (по крайней мере, четыре цифры для каждого состояния), и суммированы на фиг.2B с символами. Обратите внимание, что кривизна уменьшается как со временем освещения, так и с интенсивностью падающего света. Хотя характер последовательной усадки остается прежним, жесткость на изгиб увеличивается из-за увеличения толщины и модуля, что затрудняет изгиб. Изгиб почти исчезает, когда время отверждения превышает 10 с при интенсивности 9,5 мВт / см -2 . При разной интенсивности тенденции уменьшения кривизны во времени практически идентичны, но различаются скоростью затухания.Рисунок 2B был перерисован на рис. S3 путем изменения оси x на дозу облучения (время облучения × интенсивность падающего света). Результаты при разной интенсивности совпадают в единую кривую, и это указывает на то, что кривизна изгиба зависит исключительно от падающей дозы энергии во время реакции.
Толщина образца увеличивается с увеличением времени облучения, что аналогично результату на рис. S2D. Кривизны изгиба были измерены по нескольким цифрам, аналогичным фиг. 2A (по крайней мере, четыре цифры для каждого состояния), и суммированы на фиг.2B с символами. Обратите внимание, что кривизна уменьшается как со временем освещения, так и с интенсивностью падающего света. Хотя характер последовательной усадки остается прежним, жесткость на изгиб увеличивается из-за увеличения толщины и модуля, что затрудняет изгиб. Изгиб почти исчезает, когда время отверждения превышает 10 с при интенсивности 9,5 мВт / см -2 . При разной интенсивности тенденции уменьшения кривизны во времени практически идентичны, но различаются скоростью затухания.Рисунок 2B был перерисован на рис. S3 путем изменения оси x на дозу облучения (время облучения × интенсивность падающего света). Результаты при разной интенсивности совпадают в единую кривую, и это указывает на то, что кривизна изгиба зависит исключительно от падающей дозы энергии во время реакции.
Рис. 2 Экспериментальные результаты изгиба под действием усадки.
( A ) Прямоугольные образцы, отвержденные в чашке Петри при разном времени облучения (интенсивность света, 5 мВт см -2 ).( B ) Кривизна изгиба фотополимеризованных полос в зависимости от времени облучения и интенсивности падающего света. ( C ) Распределение напряжения по толщине образца (интенсивность света, 5 мВт см -2 ).
Для группы сравнения субстрат PDMS в чашке Петри был удален, а затем прямоугольные полоски были отверждены таким же образом с интенсивностью падающего излучения 5 мВт / см -2 (рис. 1C). Результаты показаны красными открытыми кружками на фиг. 2B. В этом случае нижний материал, который был отвержден раньше, прилипал к субстрату и не мог свободно сжиматься.После того, как деталь затвердела и отслоилась от подложки, нижняя поверхность слегка сжимается, чтобы снять внутреннее напряжение. Эта тенденция контрастирует с тем фактом, что нижняя часть сжимается в процессе последовательной усадки, и, следовательно, общая кривизна изгиба уменьшается. Таким образом, граничное условие на границе раздела между подложкой и отвержденной смолой играет ключевую роль в определении поведения при изменении формы. Влияние ограничения поверхностного слоя становится незначительным, когда общая толщина отвержденного образца увеличивается, потому что общий градиент напряжения вдоль направления толщины определяет поведение при изгибе.Изгиб, вызванный усадкой, описывается теоретической моделью, основанной на теории пучка ( 34 ). Во время фотополимеризации образцы удерживаются жидкой смолой. Вращение вне плоскости ограничено, и происходит только растяжение в плоскости. Механическое поведение пленок при освещении должно определяться силовым равновесием по направлению толщины 0z ~ (t) σdz = ∫0z ~ (t) E (ε − εS) dz = 0
Таким образом, граничное условие на границе раздела между подложкой и отвержденной смолой играет ключевую роль в определении поведения при изменении формы. Влияние ограничения поверхностного слоя становится незначительным, когда общая толщина отвержденного образца увеличивается, потому что общий градиент напряжения вдоль направления толщины определяет поведение при изгибе.Изгиб, вызванный усадкой, описывается теоретической моделью, основанной на теории пучка ( 34 ). Во время фотополимеризации образцы удерживаются жидкой смолой. Вращение вне плоскости ограничено, и происходит только растяжение в плоскости. Механическое поведение пленок при освещении должно определяться силовым равновесием по направлению толщины 0z ~ (t) σdz = ∫0z ~ (t) E (ε − εS) dz = 0(1)
Здесь z ~ — затвердевшая толщина. Напряжение σ определяется как σ = E ε e = E (ε — ε s ), где E — модуль Юнга, а ε e , ε и ε s — упругая деформация, полная деформация и деформация усадки соответственно. И E , и ε s зависят от степени преобразования φ двойных связей в акрилатной смоле (подробности модели фотополимеризации можно найти в дополнительных материалах). Общая деформация ε и деформация усадки ε s устанавливаются равными нулю, если степень преобразования φ ниже точки гелеобразования φ c . Обратите внимание, что область целостности уравнения. 1 меняется со временем. Таким образом, она решается постепенно по временным интервалам, чтобы получить значение ε при различных z и t .Когда затвердевшая пленка удаляется с подложки, ограничение исчезает, и деталь изгибается под действием своего внутреннего поля напряжений. Как силовое, так и моментное равновесие должно выполняться 0z ~ (t) σdz = ∫0z ~ (t) Eεedz = 0
И E , и ε s зависят от степени преобразования φ двойных связей в акрилатной смоле (подробности модели фотополимеризации можно найти в дополнительных материалах). Общая деформация ε и деформация усадки ε s устанавливаются равными нулю, если степень преобразования φ ниже точки гелеобразования φ c . Обратите внимание, что область целостности уравнения. 1 меняется со временем. Таким образом, она решается постепенно по временным интервалам, чтобы получить значение ε при различных z и t .Когда затвердевшая пленка удаляется с подложки, ограничение исчезает, и деталь изгибается под действием своего внутреннего поля напряжений. Как силовое, так и моментное равновесие должно выполняться 0z ~ (t) σdz = ∫0z ~ (t) Eεedz = 0(2A)
∫0z ~ (t) zσdz = ∫0z ~ (t) zEεedz = 0( 2B)
Здесь упругая деформация получается суперпозицией изгиба и растяжения ( 5 ) εe = ε − εS + εb + κ (z − z ~ 2)(3)
, где ε b — деформация изгиба средней плоскости при z = z ~ / 2, а κ — кривизна изгиба. Значение ε для растяжения в плоскости получается из расчета по формуле. 1. Уравнения 2A и B могут быть решены в целом, чтобы получить значение ε b и κ. Теоретические результаты расчетов, основанные на модели, показаны на рис. 2B линиями. Зависимость кривизны κ от времени облучения и интенсивности света хорошо фиксируется. Расхождения между экспериментами и теоретическими результатами могут происходить из-за нашей довольно упрощенной модели, которая не может охватить все детали сложной химико-механической связи во время FPP.Тем не менее, эта модель может дать некоторое представление о механизме деформации и помочь в проектировании. Интересным открытием является то, что в результате более равномерного распределения интенсивности и более высокой скорости увеличения толщины уменьшение кривизны со временем облучения происходит быстрее при более сильном падающем свете. Это наблюдение приводит к концепции дизайна, в которой, варьируя интенсивность света (или образец в градациях серого) в 2D-образце освещения, мы можем создавать толстые жесткие панели или мягкие тонкие изгибаемые детали: при одинаковом времени излучения света детали с высокой интенсивностью света имеют высокую жесткость, но меньший изгиб, а детали при низкой интенсивности света относительно мягкие, но с достаточной кривизной изгиба.
Значение ε для растяжения в плоскости получается из расчета по формуле. 1. Уравнения 2A и B могут быть решены в целом, чтобы получить значение ε b и κ. Теоретические результаты расчетов, основанные на модели, показаны на рис. 2B линиями. Зависимость кривизны κ от времени облучения и интенсивности света хорошо фиксируется. Расхождения между экспериментами и теоретическими результатами могут происходить из-за нашей довольно упрощенной модели, которая не может охватить все детали сложной химико-механической связи во время FPP.Тем не менее, эта модель может дать некоторое представление о механизме деформации и помочь в проектировании. Интересным открытием является то, что в результате более равномерного распределения интенсивности и более высокой скорости увеличения толщины уменьшение кривизны со временем облучения происходит быстрее при более сильном падающем свете. Это наблюдение приводит к концепции дизайна, в которой, варьируя интенсивность света (или образец в градациях серого) в 2D-образце освещения, мы можем создавать толстые жесткие панели или мягкие тонкие изгибаемые детали: при одинаковом времени излучения света детали с высокой интенсивностью света имеют высокую жесткость, но меньший изгиб, а детали при низкой интенсивности света относительно мягкие, но с достаточной кривизной изгиба. При сравнении по дозе облучения (рис. S3) результаты моделирования для разной интенсивности также совпадают в единую кривую. Это внутренняя особенность модели, потому что интенсивность падающего света ( I 0 ) и время облучения ( t ) вносят равный вклад в кинетику реакции (уравнение S3). 1 в модели, эволюция поля напряжений для образца, отвержденного при облучении 5 мВт / см -2 , показана на фиг. 2C. Нижний слой, который отверждается первым, остается в сжатом состоянии, тогда как верхняя часть находится в напряженном состоянии.Абсолютное значение напряжения выше в нижней части из-за высокого модуля упругости и накопления последовательной усадки. Однако общая кривизна уменьшается с увеличением времени облучения. Это связано с тем, что толщина и модуль отвержденного образца становятся достаточно большими, чтобы противостоять деформации изгиба; немного большего напряжения около нижнего слоя недостаточно для компенсации жесткости на изгиб. В результате, когда время облучения велико, изгиб фактически невелик.
При сравнении по дозе облучения (рис. S3) результаты моделирования для разной интенсивности также совпадают в единую кривую. Это внутренняя особенность модели, потому что интенсивность падающего света ( I 0 ) и время облучения ( t ) вносят равный вклад в кинетику реакции (уравнение S3). 1 в модели, эволюция поля напряжений для образца, отвержденного при облучении 5 мВт / см -2 , показана на фиг. 2C. Нижний слой, который отверждается первым, остается в сжатом состоянии, тогда как верхняя часть находится в напряженном состоянии.Абсолютное значение напряжения выше в нижней части из-за высокого модуля упругости и накопления последовательной усадки. Однако общая кривизна уменьшается с увеличением времени облучения. Это связано с тем, что толщина и модуль отвержденного образца становятся достаточно большими, чтобы противостоять деформации изгиба; немного большего напряжения около нижнего слоя недостаточно для компенсации жесткости на изгиб. В результате, когда время облучения велико, изгиб фактически невелик.
Структуры оригами, созданные с помощью одностороннего освещения
Используя изгиб, вызванный усадкой при фотополимеризации, мы можем создавать сложные трехмерные структуры из плоских полимерных листов с запрограммированными двумерными световыми узорами. Следует отметить, что если полимерный лист отверждается освещением снизу, как мы объясняли ранее, то он может изгибаться только к верхней стороне. Сначала мы покажем, как создавать конструкции оригами из этого вида одностороннего освещения. С помощью проектора двумерные световые узоры с пространственным контролем интенсивности создаются за счет изменения шкалы серого.Низкая интенсивность освещения используется в тех точках, где ожидается значительный изгиб. Для структуры стола на рис. 3 (от A до D) интенсивность была установлена на 15 и 3 мВт см −2 для панели и ножек, соответственно. Это было реализовано путем создания фигур с пространственным изменением шкалы серого (вставка на рис. 3А). Корреляция между оттенками серого и интенсивностью света была определена экспериментально и представлена на рис. S4. После определенного времени облучения (10 с для фиг. 3A), как обсуждалось ранее, отвержденный лист оставался плоским на подложке.Части, подвергавшиеся воздействию высокой интенсивности, были толще, а части, подвергавшиеся воздействию низкой интенсивности (например, ноги на рис. 3А), были относительно тоньше. Когда образец был извлечен из жидкости, те части, которые подвергались воздействию низкой интенсивности (ветви на рис. 3B), изгибались к вновь образованной стороне в результате неоднородного напряжения. Поскольку изгибаемые части имели меньшую жесткость, эта конфигурация не была стабильной. Чтобы зафиксировать форму, мы удерживали образцы пинцетом и затем отверждали их под равномерным светом 10 мВт / см -2 в течение 20-30 с (рис.3C), что сделало конструкцию более жесткой из-за значительного увеличения модуля упругости ранее мягких частей. После этого пост-отверждения образец стал достаточно прочным, чтобы выдерживать некоторый вес. Структура стола с несколькими покровными стеклами (общим весом 1,1 г, что примерно в 13 раз больше веса стола) показана на рис.
S4. После определенного времени облучения (10 с для фиг. 3A), как обсуждалось ранее, отвержденный лист оставался плоским на подложке.Части, подвергавшиеся воздействию высокой интенсивности, были толще, а части, подвергавшиеся воздействию низкой интенсивности (например, ноги на рис. 3А), были относительно тоньше. Когда образец был извлечен из жидкости, те части, которые подвергались воздействию низкой интенсивности (ветви на рис. 3B), изгибались к вновь образованной стороне в результате неоднородного напряжения. Поскольку изгибаемые части имели меньшую жесткость, эта конфигурация не была стабильной. Чтобы зафиксировать форму, мы удерживали образцы пинцетом и затем отверждали их под равномерным светом 10 мВт / см -2 в течение 20-30 с (рис.3C), что сделало конструкцию более жесткой из-за значительного увеличения модуля упругости ранее мягких частей. После этого пост-отверждения образец стал достаточно прочным, чтобы выдерживать некоторый вес. Структура стола с несколькими покровными стеклами (общим весом 1,1 г, что примерно в 13 раз больше веса стола) показана на рис. 3D.
3D.Рис. 3 Изготовление конструкций оригами методом односторонней подсветки.
( A ) Полимерный лист сразу после фотополимеризации (интенсивность панели 15 мВт см -2 ; интенсивность ножки 3 мВт см -2 ; время облучения 10 с).( B ) Свободное изгибание пространственного листа различной вулканизации. ( C ) Фиксация формы изгибаемых конструкций путем последующего отверждения (при равномерном освещении 10 мВт см −2 в течение 20–30 с). ( D ) Образец после пост-отверждения является жестким и способен удерживать несколько покровных стекол. ( E ) Цветочные структуры с разной степенью раскрытия (интенсивность панели 10 мВт см -2 ; интенсивность лепестков 2,5, 4, 6 и 7 мВт см -2 для разной степени раскрытия; время облучения 6 с ).( F ) Полимерный лист с непрерывным изменением кривизны (интенсивность варьировалась от 2,5 до 10 мВт / см -2 ; время облучения 4 с). Вставки в (A), (E) и (F) указывают световые узоры.
 Некоторые различные типы многогранников-капсул показаны на рис. 4. Чтобы стабилизировать процесс изгиба, мы добавили дополнительные панели в световой узор. Например, чтобы сформировать форму на фиг. 4A, мы прикрепили еще четыре панели, отмеченные красным «x», к сетчатому узору октаэдра на фиг. 4B. В процессе гибки дополнительная панель накладывалась на верхнюю часть соседней панели и, таким образом, стабилизировала конструкцию.Перекрытые панели слиплись после отверждения остаточной смолы на поверхности.
Некоторые различные типы многогранников-капсул показаны на рис. 4. Чтобы стабилизировать процесс изгиба, мы добавили дополнительные панели в световой узор. Например, чтобы сформировать форму на фиг. 4A, мы прикрепили еще четыре панели, отмеченные красным «x», к сетчатому узору октаэдра на фиг. 4B. В процессе гибки дополнительная панель накладывалась на верхнюю часть соседней панели и, таким образом, стабилизировала конструкцию.Перекрытые панели слиплись после отверждения остаточной смолы на поверхности.Рис. 4 Многогранники, созданные односторонним освещением.
( A ) Октаэдр (интенсивность панели 15 мВт см −2 ; интенсивность петли 3 мВт см −2 ; время облучения 6 с). ( B ) Градации серого структуры октаэдра. ( C ) Усеченный куб (интенсивность панели 15 мВт см -2 ; интенсивность петли 3,3 мВт см -2 ; время облучения 6 с).( D ) Правильный икосаэдр (интенсивность панели 15 мВт см −2 ; интенсивность петли 4 мВт см −2 ; время облучения 6 с). Вставки в (C) и (D) указывают соответствующие световые узоры, а красный крестик указывает на то, что панель является дополнительной, используемой для стабилизации конструкции.
Вставки в (C) и (D) указывают соответствующие световые узоры, а красный крестик указывает на то, что панель является дополнительной, используемой для стабилизации конструкции.
Структуры оригами, созданные с помощью двустороннего освещения
Структуры, представленные в предыдущем разделе, были созданы путем изгиба полимерных листов в одну сторону; таким образом, свобода дизайна ограничена.В этом разделе мы покажем модифицированный метод, позволяющий создавать более сложные конструкции оригами. Процесс схематично показан на фиг. 5А. Жидкую смолу вводили в плоскую форму, ограниченную двумя предметными стеклами; Два антистрикционных слоя PDMS были наклеены на внутренние стороны стеклянных предметных стекол, чтобы избежать прилипания отвержденных частей. Исходя из динамики роста FPP на рис. S2D и изменение кривизны на рис. 2B, расстояние между двумя предметными стеклами PDMS было ограничено 0,5 мм. На первом этапе детали, предназначенные для изгиба в направлении 1 (обозначены цифрой 1 на рис. 5А) были освещены снизу с низкой интенсивностью. После этого вся конструкция переворачивалась без перемещения положения в плоскости. Затем детали, предназначенные для изгиба в направлении 2 (обозначенном цифрой 2 на фиг. 5A), освещались таким же образом. После освобождения формы отвержденный лист загибался к двум разным сторонам. В реальном приложении можно применить два источника света или использовать светоделитель, чтобы сократить время обработки. Для реализации этого двухступенчатого освещения можно последовательно проецировать два световых узора.Позиции, отмеченные цифрой 2, можно было сделать черными во время первого освещения, а позиции, отмеченные цифрой 1, можно было сделать черными во время второго освещения, тогда как плоские панели можно было облучать на обоих этапах.Рис. 5 Изготовление конструкций оригами двусторонней иллюминацией.
( A ) Схема процесса двустороннего освещения. ( B ) Таблица (интенсивность панели 18 мВт / см -2 ; интенсивность лепестков 2,5 мВт / см -2 ; время облучения каждой стороны 7 с). ( C ) Структура Миуры (интенсивность панели 20 мВт см -2 ; интенсивность петли 2 мВт см -2 ; время облучения каждой стороны 7 с). ( D ) Палатка (интенсивность панели 18 мВт см −2 ; интенсивность петли 2 мВт см −2 ; время облучения каждой стороны 7 с). ( E ) Журавль (интенсивность панели 20 мВт см −2 ; интенсивность петли корпуса 1 мВт см −2 ; интенсивность петли крыла 2 мВт см −2 ; время облучения каждой стороны 15 с ).Создан методом двустороннего освещения.
( C ) Структура Миуры (интенсивность панели 20 мВт см -2 ; интенсивность петли 2 мВт см -2 ; время облучения каждой стороны 7 с). ( D ) Палатка (интенсивность панели 18 мВт см −2 ; интенсивность петли 2 мВт см −2 ; время облучения каждой стороны 7 с). ( E ) Журавль (интенсивность панели 20 мВт см −2 ; интенсивность петли корпуса 1 мВт см −2 ; интенсивность петли крыла 2 мВт см −2 ; время облучения каждой стороны 15 с ).Создан методом двустороннего освещения.
 Для оригами журавля на рис. 5E, интенсивность 2 мВт см -2 использовалась для шарниров крыльев, и очень низкая интенсивность 1 мВт см -2 использовалась для шарниров ног и хвостов.
Для оригами журавля на рис. 5E, интенсивность 2 мВт см -2 использовалась для шарниров крыльев, и очень низкая интенсивность 1 мВт см -2 использовалась для шарниров ног и хвостов. Сравнение этих двух методов показывает, что они подходят для разных условий. Хотя второй метод двустороннего освещения позволяет создавать очень сложные структуры, дополнительные этапы обработки становятся неизбежными, такие как, например, изготовление формы и введение жидкой смолы.Что касается одностороннего метода, структуры можно создать, просто нанеся один единственный узор на чан с жидкой смолой, но степень свободы оригами ограничена. Таким образом, если конструкция может быть спроектирована просто комбинацией петель, повернутых в одном направлении, тогда достаточно одностороннего метода. Метод двустороннего освещения становится необходимым, когда требуется более тонкий контроль над оригами. Обратите внимание, что в обоих методах, поскольку плоские формы были фотополимеризованы во фронтальной плоскости с вариациями интенсивности падающего света в плоскости, конечная толщина может быть не везде однородной.
% PDF-1.6
%
5 0 obj
>>> / BBox [0 0 612 792] / Длина 169 >> поток
xU
0DY4BpNj ~ Ҩ-1W5Muf»p6Z
а}
AFR.f; N ޱ lK; RJ 뽕 8HR %% A (p`c_Jl1z {b ݶ’6 DmfqLmz = ekõ;
конечный поток
эндобдж
1 0 объект
>>> / BBox [0 0 612 792] / Длина 169 >> поток
xU
0DY4BpNj ~ Ҩ-1W5Muf»p6Z
а}
AFR.f; N ޱ lK; RJ 뽕 8HR %% A (p`c_Jl1z {b ݶ’6 DmfqLmz = ekõ;
конечный поток
эндобдж
3 0 obj
>>> / BBox [0 0 612 792] / Длина 169 >> поток
xU
0DY4BpNj ~ Ҩ-1W5Muf»p6Z
а}
AFR.f; N ޱ lK; RJ 뽕 8HR %% A (p`c_Jl1z {b ݶ’6 DmfqLmz = ekõ;
конечный поток
эндобдж
7 0 объект
>>> / BBox [0 0 612 792] / Длина 169 >> поток
xU
0DY4BpNj ~ Ҩ-1W5Muf»p6Z
а}
AFR.f; N ޱ lK; RJ 뽕 8HR %% A (p`c_Jl1z {b ݶ’6 DmfqLmz = ekõ;
конечный поток
эндобдж
4 0 obj
>>> / BBox [0 0 612 792] / Длина 169 >> поток
xU
0DY4BpNj ~ Ҩ-1W5Muf»p6Z
а}
AFR.f; N ޱ lK; RJ 뽕 8HR %% A (p`c_Jl1z {b ݶ’6 DmfqLmz = ekõ;
конечный поток
эндобдж
8 0 объект
>>> / BBox [0 0 612 792] / Длина 169 >> поток
xU
0DY4BpNj ~ Ҩ-1W5Muf»p6Z
а}
AFR.f; N ޱ lK; RJ 뽕 8HR %% A (p`c_Jl1z {b ݶ’6 DmfqLmz = ekõ;
конечный поток
эндобдж
6 0 obj
>>> / BBox [0 0 612 792] / Длина 169 >> поток
xU
0DY4BpNj ~ Ҩ-1W5Muf»p6Z
а}
AFR. f; N ޱ lK; RJ 뽕 8HR %% A (p`c_Jl1z {b ݶ’6 DmfqLmz = ekõ;
конечный поток
эндобдж
10 0 obj
> поток
2021-10-23T23: 11: 22-07: 002005-09-12T17: 27: 16 + 05: 302021-10-23T23: 11: 22-07: 00application / pdfuuid: c346282f-0923-457f-8b56-d2711fd5b10auuid: 693cfdfc-c93e-4a48-b742-9c294746430f конечный поток
эндобдж
11 0 объект
> поток
x +
f; N ޱ lK; RJ 뽕 8HR %% A (p`c_Jl1z {b ݶ’6 DmfqLmz = ekõ;
конечный поток
эндобдж
10 0 obj
> поток
2021-10-23T23: 11: 22-07: 002005-09-12T17: 27: 16 + 05: 302021-10-23T23: 11: 22-07: 00application / pdfuuid: c346282f-0923-457f-8b56-d2711fd5b10auuid: 693cfdfc-c93e-4a48-b742-9c294746430f конечный поток
эндобдж
11 0 объект
> поток
x +
Идиопатический сколиоз у детей и подростков: обследование с помощью бипланарного рентгеновского аппарата | Insights into Imaging

Kim H, Kim HS, Moon ES, Yoon CS, Chung TS, Song HT et al (2010) Визуализация сколиоза: что должны знать радиологи. Рентгенограмма 30: 1823–1842
PubMed Статья Google ученый
Nash CL Jr, Gregg EC, Brown RH, Pillai K (1979) Риски воздействия рентгеновских лучей у пациентов, проходящих длительное лечение сколиоза. J Bone Joint Surg Am 61: 371–374
PubMed Google ученый
Hoffman DA, Lonstein JE, Morin MM, Visscher W, Harris BS 3rd, Boice JD Jr (1989) Рак груди у женщин со сколиозом, подвергшихся множественному диагностическому рентгеновскому облучению. J Natl Cancer Inst 81: 1307–1312
PubMed CAS Статья Google ученый
Ronckers CM, Land CE, Miller JS, Stovall M, Lonstein JE, Doody MM (2010) Смертность от рака среди женщин, часто подвергающихся рентгенологическим исследованиям по поводу заболеваний позвоночника. Radiat Res 174: 83–90
Radiat Res 174: 83–90
PubMed CAS PubMed Central Статья Google ученый
Goldberg MS, Mayo NE, Levy AR, Scott SC, Poîtras B (1998) Неблагоприятные репродуктивные исходы у женщин, подвергшихся воздействию низких уровней ионизирующего излучения по данным диагностической рентгенографии для подросткового идиопатического сколиоза. Эпидемиология 9: 271–278
PubMed CAS Статья Google ученый
Dubousset J, Charpak G, Dorion I, Skalli W, Lavaste F, Deguise J et al (2005) Новый подход к 2D и 3D визуализации физиологии и патологии опорно-двигательного аппарата с использованием низких доз облучения и положения стоя: система EOS.Bull Acad Natl Med 189: 287–297
PubMed Google ученый
Deschênes S, Charron G, Beaudoin G, Labelle H, Dubois J, Miron MC et al (2010) Диагностическая визуализация деформаций позвоночника: снижение дозы облучения пациентов с помощью нового рентгеновского сканера со щелевым сканированием. Spine 35: 989–994
Spine 35: 989–994
PubMed Статья Google ученый
Маккенна С., Уэйд Р., Фариа Р., Ян Х., Стирк Л., Гаммерсон Н. и др. (2012) Система рентгеновской визуализации EOS 2D / 3D: систематический обзор и экономическая оценка.Оценка медицинских технологий 16: 1–188
CAS Статья Google ученый
Gheno R, Nectoux E, Herbaux B, Baldisserotto M, Glock L, Cotten A et al (2012) Трехмерные измерения нижней конечности у детей и подростков с помощью рентгеновского аппарата LDB. Eur Radiol 22: 765–771
PubMed Статья Google ученый
Dubousset J, Charpak G, Skalli W, Kalifa G, Lazennec JY (2007) Стереорадиографическая система EOS: одновременные переднезадние и боковые рентгенограммы всего тела с очень низкой дозой облучения.Rev Chir Orthop Reparatrice Appar Mot 93: 141–143
PubMed CAS Статья Google ученый

Aubin CE, Dansereau J, Parent F, Labelle H, de Guise JA (1997) Морфометрические оценки персонализированных трехмерных реконструкций и геометрических моделей позвоночника человека. Med Biol Eng Comput 35: 611–618
PubMed CAS Статья Google ученый
Дюма Р., Айссауи Р., Миттон Д., Скалли В., де Гиз Дж. А. (2005) Персонализированные параметры сегментов тела с помощью бипланарной рентгенографии с низкой дозой.IEEE Trans Biomed Eng 52: 1756–1763
PubMed Статья Google ученый
Baudoin A, Skalli W, de Guise JA, Mitton D (2008) Параметрическая предметно-зависимая модель для трехмерной реконструкции in vivo с использованием биплоскостных рентгеновских лучей: приложение к верхней бедренной конечности. Med Biol Eng Comput 46: 799–805
PubMed CAS Статья Google ученый

Humbert L, De Guise JA, Aubert B, Godbout B, Skalli W. (2009) Трехмерная реконструкция позвоночника по бипланарным рентгеновским снимкам с использованием параметрических моделей, основанных на поперечных и продольных выводах.Med Eng Phys 31: 681–687
PubMed CAS Статья Google ученый
Glaser DA, Doan J, Newton PO (2012) Сравнение точности трехмерной реконструкции позвоночника: двухплоскостные рентгенограммы с EOS по сравнению с компьютерной томографией. Spine 37: 1391–1397
PubMed Статья Google ученый
Ilharreborde B, Steffen JS, Nectoux E, Vital JM, Mazda K, Skalli W et al (2011) Воспроизводимость угловых измерений с использованием трехмерных реконструкций EOS при идиопатическом сколиозе у подростков, леченных с помощью задних инструментов.Spine 36: 1306–1313
Статья Google ученый

Illés T, Tunyogi-Csapó M, Somoskeöy S (2011) Прорыв в диагностике трехмерного сколиоза: значение горизонтальной плоскости и векторов позвонков. Eur Spine J 20: 135–143
PubMed PubMed Central Статья Google ученый
Than P, Szuper K, Somoskeöy S, Warta V, Illlés T (2012) Геометрические значения нормального и артритного бедра и колена, обнаруженные с помощью системы визуализации EOS.Int Orthop 36: 1291–1297
PubMed PubMed Central Статья Google ученый
Faro FD, Marks MC, Pawelek J, Newton PO (2004) Оценка функционального положения для получения боковой рентгенограммы при идиопатическом сколиозе у подростков. Spine 29: 2284–2289
PubMed Статья Google ученый
Morvan G, Mathieu P, Vuillemin V, Guerini H, Bossard P, Zeitoun F. et al (2011) Стандартизированный способ визуализации сагиттального баланса позвоночника. Eur Spine J 20 (Дополнение 5): 602
Eur Spine J 20 (Дополнение 5): 602
PubMed PubMed Central Статья Google ученый
Супакул Н., Ньюбро К., Коэн, доктор медицины, Дженнингс С.Г. (2012) Диагностические ошибки при цифровом сшивании изображений сколиоза — важность оценки исходных изображений до постановки окончательного диагноза. Pediatr Radiol 42: 584–598
PubMed Статья Google ученый
Raczkowski JW, Daniszewska B, Zolynski K (2010) Функциональный сколиоз, вызванный несоответствием длины ног. Arch Med Sci 6: 393–398
PubMed PubMed Central Статья Google ученый
Dietrich TJ, Pfirrmann CW, Schwab A, Pankalla K, Buck FM (2013) Сравнение дозы облучения, рабочего процесса, комфорта пациента и финансовой безубыточности стандартной цифровой рентгенографии и новой бипланарной рентгенографии с низкой дозой рентгеновского излучения. лучевая система для вертикальной рентгенографии нижних конечностей и всего позвоночника в полный рост.Skelet Radiol 42: 959–967
лучевая система для вертикальной рентгенографии нижних конечностей и всего позвоночника в полный рост.Skelet Radiol 42: 959–967
Статья Google ученый
Ааро С., Дальборн М. (1981) Оценка вращения позвоночника и деформации позвоночника и грудной клетки при сколиозе с помощью компьютерной томографии. Spine 6: 460–467
PubMed CAS Статья Google ученый
Ho EK, Upadhyay SS, Ferris L, Chan FL, Bacon-Shone J, Hsu LC et al (1992) Сравнительное исследование компьютерных томографических и простых рентгенографических методов для измерения вращения позвоночника при идиопатическом сколиозе у подростков.Spine 17: 771–774
PubMed CAS Статья Google ученый
Somoskeöy S, Tunyogi-Csapo M, Bogyo C, Illés T (2012) Точность и надежность данных корональной и сагиттальной кривизны позвоночника на основе трехмерных моделей пациента, созданных с помощью системы визуализации EOS 2D / 3D . Spine J 12: 1052–1059
PubMed Статья Google ученый
Mac-Thiong JM, Labelle H, Berthonnaud E, Betz RR, Roussouly P (2007) Сагиттальный позвоночно-тазовый баланс у здоровых детей и подростков. Eur Spine J 16: 227–234
PubMed PubMed Central Статья Google ученый
Видаль С., Ильхарреборд Б., Азулай Р., Себаг Г., Мазда К. (2013) Надежность шейного лордоза и измерения глобального сагиттального баланса позвоночника при идиопатическом сколиозе подростков. Eur Spine J 22: 1362–1367
PubMed PubMed Central Статья Google ученый
Roussouly P, Nnadi C (2010) Деформация в сагиттальной плоскости: обзор интерпретации и лечения. Eur Spine J 19: 1824–1836
PubMed PubMed Central Статья Google ученый
Legaye J, Duval-Beaupère G, Hecquet J, Marty C (1998) Тазовая атака: основной тазовый параметр для трехмерной регуляции сагиттальных кривых позвоночника. Eur Spine J 7: 99–103
PubMed CAS PubMed Central Статья Google ученый
Legaye J (2007) Задний бедренно-крестцовый угол: анатомический сагиттальный тазовый параметр, используемый с куполообразным крестцом. Eur Spine J 16: 219–225
PubMed PubMed Central Статья Google ученый
Stagnara P, De Mauroy JC, Dran G, Gonon GP, Costanzo G, Dimnet J et al (1982) Взаимный изгиб тел позвонков в сагиттальной плоскости: подход к справочным материалам для оценки кифоза и лордоза.Spine 7: 335–342
PubMed CAS Статья Google ученый
Roussouly P, Berthonnaud E, Dimnet J (2003) Геометрический и механический анализ поясничного лордоза у бессимптомной популяции: предлагаемая классификация. Rev Chir Orthop Reparatrice Appar Mot 89: 632–639
PubMed CAS Google ученый
Tan KJ, Moe MM, Vaithinathan R, Wong HK (2009) Прогрессирование кривой при идиопатическом сколиозе: последующее исследование до зрелости скелета.Spine 34: 697–700
PubMed Статья Google ученый
Ленке Л.Г., Бец Р.Р., Хармс Дж., Бридвелл К.Х., Клементс Д.Х., Лоу Т.Г. и др. (2001) Идиопатический сколиоз у подростков: новая классификация для определения степени артродеза позвоночника. J Bone Joint Surg Am 83: 1169–1181
PubMed Google ученый
Cobb JR (1948) Схема изучения сколиоза.Лекции учебного курса. Am Acad Orthop Surg 5: 261–275
Google ученый
Perdriolle R, Vidal J (1985) Оценка кривой грудного идиопатического сколиоза и прогноз. Spine 20: 546–553
Google ученый
Nash C, Moe JH (1969) Исследование вращения позвоночника. J Bone Joint Surg 51: 223–229
PubMed Google ученый
Drerup B (1984) Принципы измерения ротации позвонков по фронтальной проекции ножек. J Biomech 17: 923–935
PubMed CAS Статья Google ученый
Illés T, Somoskeöy S (2013) Сравнение измерений сколиоза на основе трехмерных векторов позвонков и обычных двумерных измерений: преимущества в оценке прогноза и хирургических результатов. Eur Spine J 22: 1255–1263
PubMed PubMed Central Статья Google ученый
Терминология позиционирования и проекции радиографических снимков — видео и стенограмма урока
Расположение тела
Радиографическое расположение относится к способу размещения тела, мы называем это общим положением тела, или к части тела, которая находится ближе всего к рецептору изображения, и мы называем это конкретным положением тела.Приемник изображения (IR) представляет собой устройство, такое как рентгеновская пленка или цифровое устройство сбора данных, которое захватывает, а затем помогает преобразовать рентгеновский луч в видимое изображение. Итак, как я только что сказал, рентгенографическое положение может относиться к общему положению тела или определенному положению тела.
Под общим положением тела я имею в виду очень просто, это то, как тело в целом расположено! Человек лежит на спине (лежит на спине лицом вверх)? Или они склонны (лежат на животе, лицом вниз)?
В литотомическом положении (лежа на спине с поднятыми коленями) или в положении Тренделенбурга?
Но радиографическое позиционирование также может относиться к определенным положениям тела.Конкретное положение тела описывает часть тела, ближайшую к ИК-области или поверхности тела, на которой лежит пациент.
Давайте представим, что ИК — это стена, если вы стоите, прижав левое плечо и левое бедро к стене, это известно как прямое левое боковое положение, где боковое положение означает относящийся к стороне. С другой стороны, если я скажу, что вы находитесь в вертикальном правом боковом положении, то какая сторона вашего тела ближе всего к стене? Конечно же, правая сторона!
Хорошо, это было действительно легко; тогда давайте на этом опираемся.Когда я говорю слово decubitus , я имею в виду лежа. Итак, исходя из того, что вы узнали, если я скажу, что положение — правый боковой пролежень, что происходит?
Ну, латеральный означает «бок», а декубитус означает «лежа». Это означает, что пациент лежит на правом боку. Мы также можем назвать это положение лежа на правом боку, потому что лежачее положение также означает лежа. Если я говорю «левый боковой пролежень», значит, пациент лежит на левом боку.
Опять же, эта терминология может указывать на положение тела при рентгеновском снимке или на ту часть тела, которая находится ближе всего к рентгеновскому снимку.Иногда они эквивалентны, а иногда нет. Я объясню, как так, после того, как мы пройдемся по рентгенограммам.
Радиографические проекции
На данный момент я хочу, чтобы вы знали, что не вся терминология радиографического позиционирования имеет отношение к положению тела. Иногда они связаны с радиографическими проекциями , путем, по которому рентгеновский луч проходит через тело. Прежде чем я перейду к клинической практике, вы можете услышать, что слова «проекция» и «положение» взаимозаменяемы, но я выделю их здесь как отдельные понятия, потому что они на самом деле не одно и то же.
Позиция относится к размещению или положению тела в соответствии с последним разделом. Проекция относится к тому, как луч рентгеновского излучения, подобно стрелке, проходит через тело, когда человек находится в этом положении. Помните, что эта стрела может проходить и проецироваться спереди назад, сзади вперед, из стороны в сторону и так далее.
Как и эта стрелка, рентгеновский луч может проходить через ваше тело во многих разных направлениях. Спереди назад, сзади вперед, из стороны в сторону и т. Д., в зависимости от того, как он нацелен. У нас есть названия для этих путей. Если название проекции объединяет два термина в одно слово, то первым идет термин, который представляет собой аспект тела, через которое в первую очередь проходит рентгеновский луч. ИК расположен на той стороне, где рентгеновский луч выходит из тела.
Переднезадняя проекция (AP) проходит спереди (спереди) человека и выходит через спину (сзади) человека. Это означает, что ИК находится за спиной человека.
В задне-передней проекции (PA) рентгеновский луч входит в спину человека и выходит из передней части человека. Это означает, что ИК находится перед человеком.
В боковой проекции (LAT) пациент располагается под прямым углом к пленке, и луч проходит с одной стороны на другую. Он назван в честь той стороны тела, которая находится ближе всего к ИК-датчику.
В наклонной проекции (OBL) пациент располагается таким образом, чтобы его тело было наклонено боком к ИК.Наклонный означает в наклонном положении.
Собираем все вместе
Хорошо, теперь вы, вероятно, не понимаете, как радиографическое позиционирование и радиографические проекции работают вместе. Позвольте мне привести вам действительно хороший пример, который раз и навсегда покажет вам разницу между положением и проекцией.
Допустим, ваш пациент находится в положении лежа на левом боку, но с передней проекцией. Что это значит для нас? Положение пациента указывает на то, что он лежит на левом боку, но рентгеновский луч направлен таким образом, чтобы он проходил спереди его тела и выходил через спину на ИК-датчик, который находится позади человека.
Но если бы я сказал вам, что положение спинное декубитное с левой боковой проекцией, что это значит для вас? Это означает, что человек лежит на спине (спина), но рентгеновский луч проходит с правой стороны его тела и выходит с левой стороны, на которой находится ИК-датчик.
Краткое содержание урока
Это был сложный урок, и это всего лишь самая основная суть сравнения проекции и положения в рентгенографии, поскольку на этом уроке есть много нюансов.Но давайте рассмотрим, что я хотел бы, чтобы вы запомнили.
Радиографическое положение относится к способу размещения тела, то есть к общему положению тела, или к той части тела, которая находится ближе всего к рецептору изображения, то есть к определенному положению тела.
Приемник изображения (IR) — это устройство, такое как рентгеновская пленка или цифровое устройство сбора данных, которое захватывает, а затем помогает преобразовать рентгеновский луч в видимое изображение.
Я хочу, чтобы вы помнили, что определенное положение тела описывает часть тела, ближайшую к ИК-области или поверхности тела, на которой лежит пациент.Говоря о положении лежа, помните, что слова лежачий и лежачий означают лежа. Хотя иногда положение и проекция используются как взаимозаменяемые, радиографические проекции , фактически относятся к пути, по которому рентгеновский луч проходит через тело.
Если название проекции объединяет два термина в одно слово, то термин, который идет первым, является аспектом тела, через которое сначала проходит рентгеновский луч.