Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
Привет, гиктаймс!Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
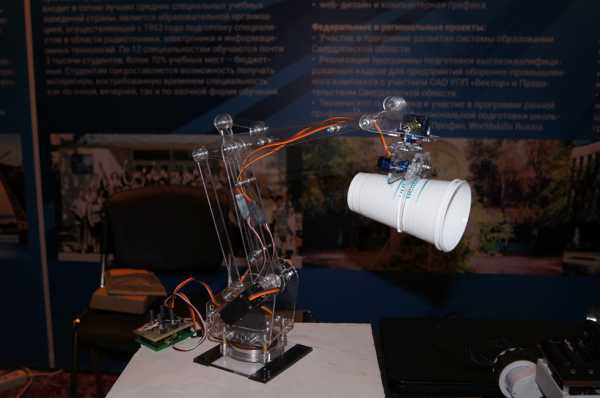
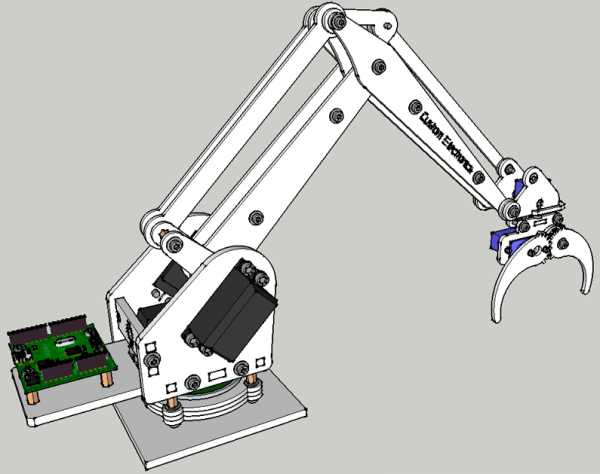
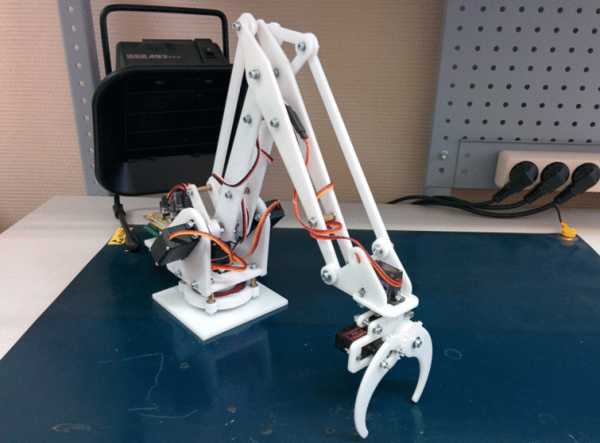
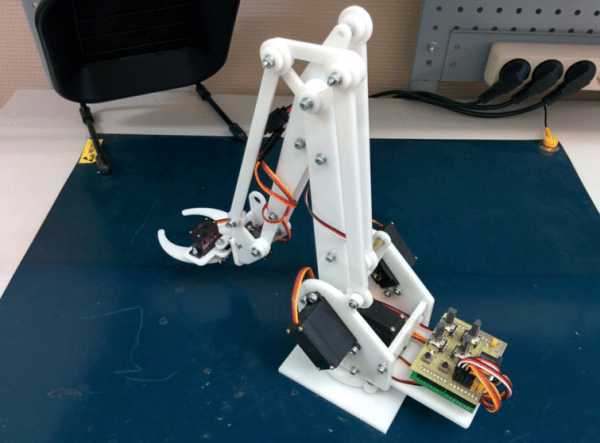
Сейчас моя робо-рука выглядит так:

Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.

Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
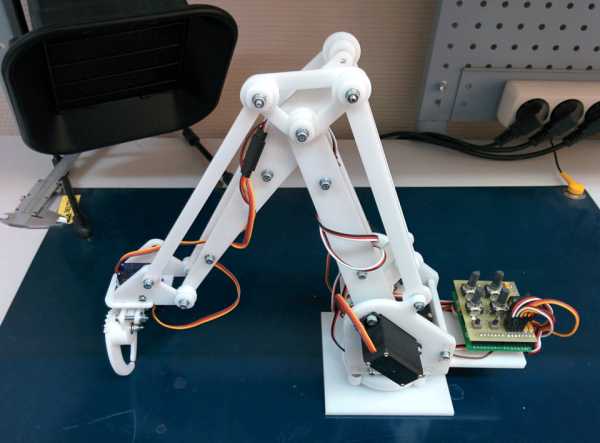
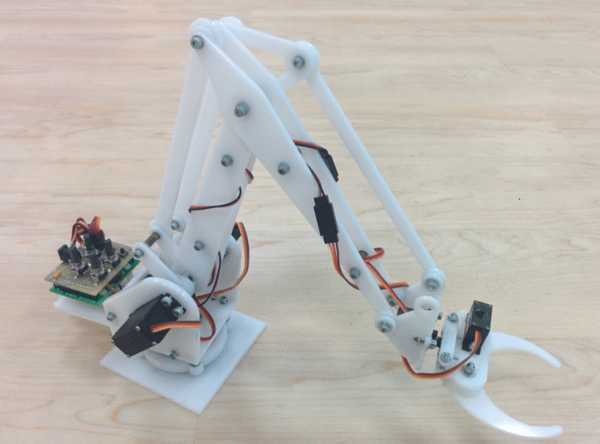
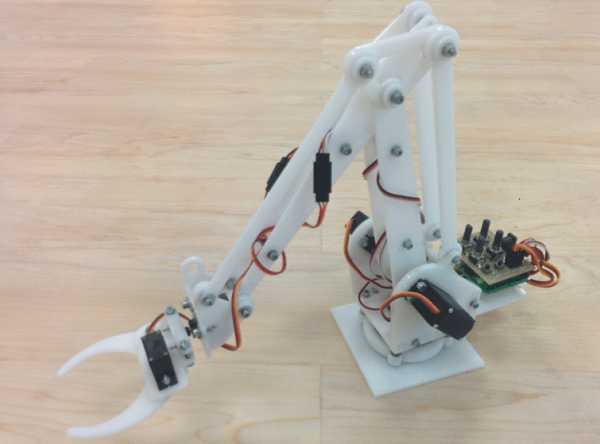
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
До появления uArm, настольные манипуляторы подобного класса выглядели достаточно уныло. У них либо не было электроники вообще, либо было какое-нибудь управление с резисторами, либо было свое проприетарное ПО. Во-вторых, они как правило не имели системы параллельных шарниров и сам захват менял свое положение в процессе работы. Если собрать все достоинства моего манипулятора, то получается достаточно длинный список:
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки. Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
- Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость. Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Механика
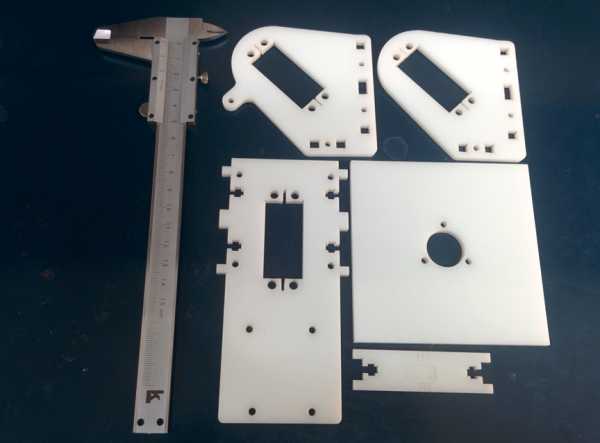
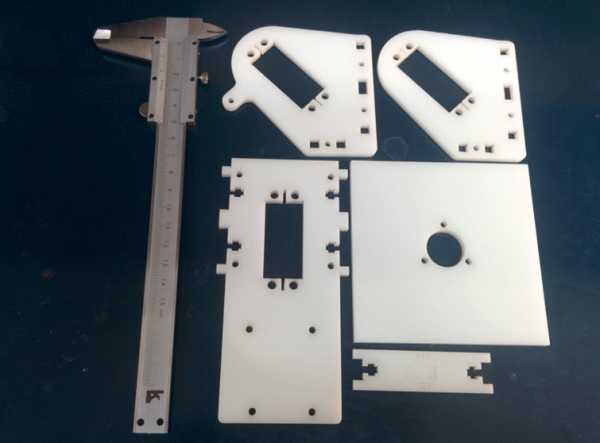
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
… и 3мм:
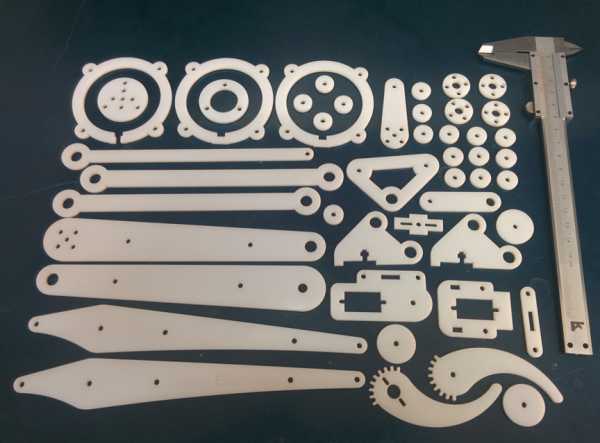
С меня за резку всех этих деталей взяли около $10.
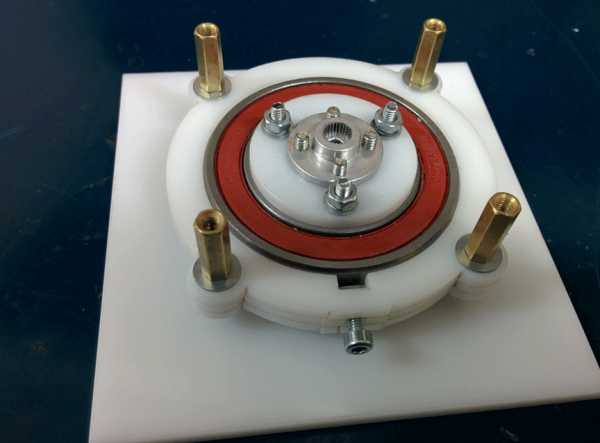
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.

Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:

В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом. Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.

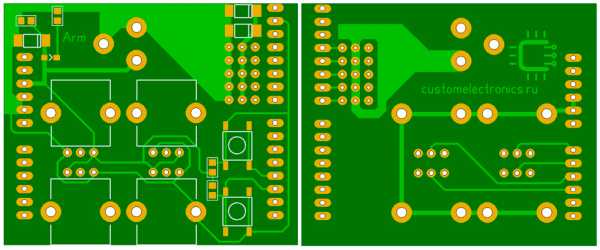
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Ссылки
Файлы для резки оргстекла, 3D-модели, список для покупки, чертежи платы и софт можно скачать в конце моей основной статьи.
Подробная инструкция по сборке в фотографиях (осторожно, траффик).
habr.com
Роботизованная рука-манипулятор. Создаем робота-андроида своими руками [litres]
Роботизованная рука-манипулятор
Рука-манипулятор (см. рис. 15.1) имеет три степени свободы движения. Локтевое сочленение может перемещаться вертикально вверх-вниз по дуге примерно 135°. Плечевой «сустав» перемещает захват вперед и назад по дуге примерно 120°. Рука может поворачиваться на основании по часовой стрелке или против часовой стрелки на угол примерно 350°. Захват руки робота может брать и удерживать объекты до 5 см в диаметре и поворачиваться вокруг в кистевом сочленении примерно на 340°.
Рис. 15.1. Кинематическая схема движений и поворотов руки-робота
Для приведения руки в движение компания OWI Robotic Arm Trainer использовала пять миниатюрных двигателей постоянного тока. Двигатели обеспечивают управление рукой при помощи проводов. Такое «проводное» управление означает, что каждая функция движения робота (т. е. работа соответствующего двигателя) управляется отдельными проводами (подачей напряжения). Каждый из пяти двигателей постоянного тока управляет своим движением руки-манипулятора. Управление по проводам позволяет сделать блок контроллера руки, непосредственно реагирующий на электрические сигналы. Это упрощает схему интерфейса руки робота, который подключается к порту принтера.
Рука изготовлена из легкого пластика. Большинство деталей, несущих основную нагрузку, также выполнены из пластика. Двигатели постоянного тока, использованные в конструкции руки, представляют собой миниатюрные высокооборотные двигатели с низким крутящим моментом. Для увеличения крутящего момента каждый мотор соединен с редуктором. Двигатели вместе с редукторами установлены внутри конструкции руки-манипулятора. Хотя редуктор увеличивает крутящий момент, рука робота не может поднять или нести достаточно тяжелые предметы. Рекомендуемый максимально допустимый вес при поднятии составляет 130 г.
Набор для изготовления руки робота и его компоненты представлены на рисунках 15.2 и 15.3.
Рис. 15.2. Набор для изготовления руки-робота
Рис. 15.3. Редуктор перед сборкой
Следующая глава >
tech.wikireading.ru
Промышленный робот манипулятор своими руками. Роботизированная рука манипулятор. Основные узлы для проекта манипулятора
Сначала будут затронуты общие вопросы, потом технические характеристики результата, детали, а под конец и сам процесс сборки.
В целом и общем
Создание данного устройства в целом не должно вызвать каких-то сложностей. Необходимо будет качественно продумать только возможности что будет довольно сложно осуществить с физической точки зрения, чтобы рука-манипулятор выполняла поставленные перед ней задачи.
Технические характеристики результата
Будет рассматриваться образец с параметрами длины/высоты/ширины соответственно 228/380/160 миллиметров. Вес сделанной, будет составлять примерно 1 килограмм. Для управления используется проводной дистанционный пульт. Ориентировочное время сборки при наличии опыта — около 6-8 часов. Если его нет, то могут уйти дни, недели, а при попустительстве и месяцы, чтобы была собрана рука-манипулятор. Своими руками и одному в таких случаях стоит делать разве что для своего собственного интереса. Для движения составляющих используются коллекторные моторы. Приложив достаточно усилий, можно сделать прибор, который будет поворачиваться на 360 градусов. Также для удобства работы, кроме стандартного инструментария вроде паяльника и припоя, необходимо запастись:
- Удлинёнными плоскогубцами.
- Боковыми кусачками.
- Крестовой отверткой.
- 4-мя батарейками типа D.
Пульт дистанционного управления можно реализовать, используя кнопки и микроконтроллер. При желании сделать дистанционное беспроводное управление элемент контроля действий понадобится и в руке-манипуляторе. В качестве дополнений необходимы будут только устройства (конденсаторы, резисторы, транзисторы), которые позволят стабилизировать схему и передавать по ней в нужные моменты времени ток необходимой величины.
Мелкие детали
Для регуляции количества оборотов можно использовать переходные колесики. Они позволят сделать движение руки-манипулятора плавными.
Также необходимо позаботится о том, чтобы провода не усложняли её движения. Оптимальным будет проложить их внутри конструкции. Можно сделать всё и извне, такой подход сэкономит время, но потенциально может привести к сложностям в перемещении отдельных узлов или всего устройства. А теперь: как сделать манипулятор?
Сборка в общих чертах
Теперь приступаем непосредственно к созданию руки-манипулятора. Начинаем с основания. Необходимо обеспечить возможность поворота устройства во все стороны. Хорошим решением будет его размещение на дисковой платформе, которая приводится во вращение с помощью одного мотора. Чтобы она могла вращаться в обе стороны, существует два варианта:
- Установка двух двигателей. Каждый из них будет отвечать за поворот в конкретную сторону. Когда один работает, второй пребывает в состоянии покоя.
- Установка одного двигателя со схемой, которая сможет заставить его крутится в обе стороны.
Какой из предложенных вариантов выбрать, зависит исключительно от вас. Далее делается основная конструкция. Для комфорта работы необходимо два «сустава». Прикреплённый к платформе должен уметь наклоняться в разные стороны, что решается с помощью двигателей, размещённых в его основании. Ещё один или пару следует разместить в месте локтевого изгиба, чтобы часть захвата можно было перемещать по горизонтальной и вертикальной линии системы координат. Далее, при желании получить максимальные возможности, можно установить ещё двигатель в месте запястья. Далее наиболее необходимое, без чего не представляется рука-манипулятор. Своими руками предстоит сделать само устройство захвата. Тут существует множество вариантов реализации. Можно дать наводку по двум самым популярным:
- Используется только два пальца, которые одновременно сжимают и разжимают объект захвата. Является самой простой реализацией, которая, правда, обычно не может похвастаться значительной грузоподъёмностью.
- Создаётся прототип человеческой руки. Тут для всех пальцев может использоваться один двигатель, с помощью которого будет осуществляться сгиб/разгиб. Но можно сделать и конструкцию сложней. Так, можно к каждому пальцу подсоединить по двигателю и управлять ими отдельно.
Далее остаётся сделать пульт, с помощью которого будет о
elecmaster.ru
Манипулятор (механизм) — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 9 декабря 2018; проверки требует 1 правка. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 9 декабря 2018; проверки требует 1 правка. У этого термина существуют и другие значения, см. Манипулятор. Манипуляторы FANUC
Манипуляторы FANUC  Робот-манипулятор работает вблизи печи.
Робот-манипулятор работает вблизи печи.Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века, благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе.
Основу манипуляторов составляют пространственные механизмы со многими степенями свободы. Манипуляторы выполняют работы в средах, недоступных или опасных для человека (подводные глубины, вакуум, радиоактивная среда и другие агрессивные среды), вспомогательные работы в промышленном производстве. Манипуляторы используются в медицинской технике (например, в протезировании). Манипуляторы изучает теория манипуляторов, которая является разделом теории машин и механизмов. В узком смысле манипулятором называется механическая рука.
Манипуляторы делятся на управляемые человеком и автоматические манипуляторы (роботы-манипуляторы как разновидность роботов). Развитие манипуляторов привело к созданию промышленных роботов. Проектирование механизмов-манипуляторов требует решения таких задач, как создание манёвренности, устойчивости в работе, выбор правильного соотношения полезных и холостых ходов. Иногда требуется проектирование таких систем, в которых оператор чувствует усилие, создаваемое на рабочем органе или на грузозахвате.
Рассматривается также внедрение комплексов манипуляционных роботов в образовательный процесс[1].
- Манипулятор (в горном деле) — основной механизм буровой каретки, предназначенный для перемещения в призабойном пространстве автоподатчика с перфоратором (бурильной машиной).
- Манипулятор (в металлургии) — машина для выполнения вспомогательных операций, связанных с изменением положения заготовки при обработке металлов давлением. Различаются прокатный и ковочный манипулятор. В кузнечных и прокатных цехах используются подвесные и напольные манипуляторы, которые являются разновидностью кантователей (механизмов для переворачивания (кантовки) изделий).
- Манипулятор (в ядерной технике) — приспособление для работы с радиоактивными веществами, исключающее непосредственный контакт человека с этими веществами.
- Манипуляторами оснащаются гидростаты для ведения океанографических и других работ на глубинах.
- Платформа Гью — Стюарта — разновидность параллельного манипулятора, в которой используется октаэдральная компоновка стоек. Имеет шесть степеней свободы. Применяется в станкостроении, подводных исследованиях, авиационных спасательных операциях на море, летательных тренажёрах, позиционировании спутниковых антенн, в телескопах и в ортопедической хирургии.
- Кран-манипулятор — мобильная грузоподъёмная машина, включающая грузоподъёмный кран стрелового типа, смонтированный на автомобильном шасси и служащий для его загрузки и разгрузки[2].
Исследователи из университета Бен-Гуриона (Ben-Gurion University, BGU), Израиль, разработали новый тип манипулятора для роботов, которые, благодаря его наличию, станут способны выполнять работы самого разного плана, начиная от сбора овощей и фруктов на сельскохозяйственных угодьях, и заканчивая обслуживанием спутников на околоземной орбите. Манипулятор MASR (minimally actuated serial robot) представляет собой ещё один почти типичный вариант воплощения робота-змеи, состоящего из множества последовательно соединённых сегментов, приводимых в действие отдельными двигателями. Только в данном случае используются всего два двигателя, один для движения манипулятора по его основанию, а второй — для изгиба манипулятора в нужном месте и в нужном направлении[3].
- Попов Е. П., Верещагин А. Ф., Зенкевич С. Л. Манипуляционные роботы: динамика и алгоритмы. — М.: Наука, 1978. — 400 с.
- Медведев В. С., Лесков А. Г., Ющенко А. С. Системы управления манипуляционных роботов. — М.: Наука, 1978. — 416 с.
- Козлов В. В., Макарычев В. П., Тимофеев А. В., Юревич Е. И. Динамика управления роботами. — М.: Наука, 1984. — 336 с.
- Фу К., Гонсалес Р., Ли К. Робототехника / Пер. с англ. — М.: Мир, 1989. — 624 с. — ISBN 5-03-000805-5.
- Шахинпур, М. Курс робототехники / Пер. с англ. — М.: Мир, 1990. — 527 с. — ISBN 5-03-001375-X.
ru.wikipedia.org
Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками
Всем привет!Пару лет назад на kickstarter появился очень занятный проект от uFactory — настольная робо-рука uArm. Они обещали со временем сделать проект открытым, но я не мог ждать и занялся реверс-инжинирингом по фотографиям.
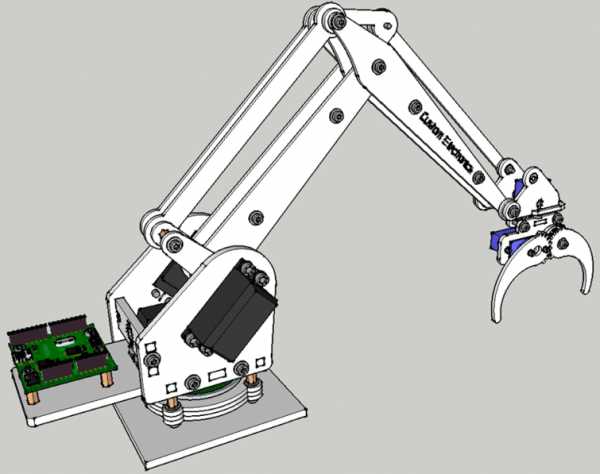
За эти годы я сделал четыре версии своего виденья этого манипулятора и в итоге разработал вот такую конструкцию:
Это робо-рука с интегрированным контроллером, приводимая в движение пятью сервпоприводами. Основное ее достоинство в том, что все детали либо можно купить, либо дешево и быстро вырязать из оргстекла лазером.
Так как в качестве источника вдохновения я брал open sorce — проект, то всеми своими результатми делюсь полностью. Вы сможете скачать все исходники по ссылкам в конце статьи и, при желании, собрать такую же (все ссылки в конце статьи). Но проще один раз показать ее в работе, чем долго рассказывать что она из себя представляет:
Итак, перейдем к описанию.
Технические характеристики
- Высота: 300мм.
- Рабочая зона (при полностью вытянутом манипуляторе): от 140мм до 300мм вокруг основания
- Максимальная грузоподъемность на вытянутой руке, не менее: 200г
- Потребляемый ток, не более: 6А
- Подшипники во всех подвижных частях манипулятора. Всего их одинадцать: 10 штук на вал 3мм и один на вал 30мм.
- Простота сборки. Я очень много внимания уделил тому, чтобы была такая последовательность сборки манипулятора при которой все детали прикручивать предельно удобно. Особенно сложно было сделать это для узлов мощных сервоприводов в основании.
- Все мощные сервоприводы расположены в основании. То есть «нижние» сервоприводы не таскают «верхние».
- За счет параллельных шарниров инструмент всегда остается параллелен или перпендикулярен земле.
- Положение манипулятора можно менять на 90 градусов.
- Готовое Arduino-совместимое программное обеспечение. Правильно собранная рука может управляться мышкой, а по примерам кода можно составить свои алгоритмы движения
Все детали манипулятора режутся из оргстекла толщиной 3 и 5мм:

 Обратите внимание, как собирается поворотное основание:
Обратите внимание, как собирается поворотное основание:
Самый сложный, это узел в нижней части манипулятора. В первых версиях у меня уходило очень много сил, чтобы собрать его. В нем соединяются три сервопривода и передаются усилия на захват. Детали вращаются вокруг штифта диаметром 6мм. Захват удерживается парралельно (или перпендикулярно) рабочей поверхности за счет дополнительных тяг:

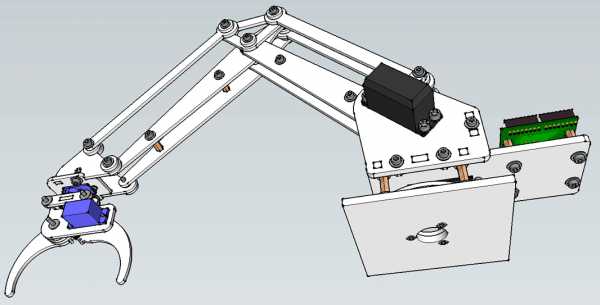
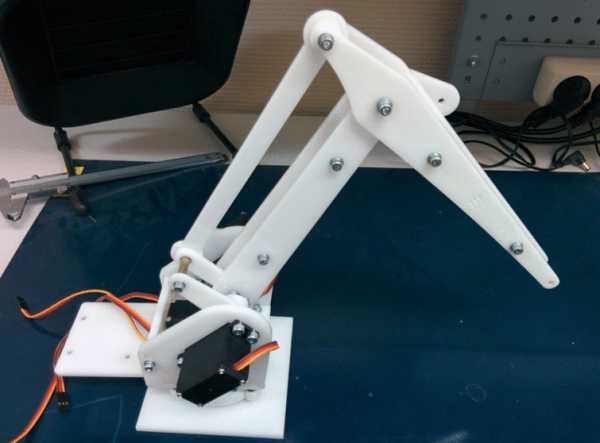
Манипулятор с установленым плечом и локтем показан на фотографии ниже. К нему еще только предстоит добавить клешню и тяги для нее:
Клешня тоже устанавливается на подшипниках. Она может сжиматься и поворачиваться вокруг своей оси:

Клешню можно установить как вертикально, так и горизонтально:

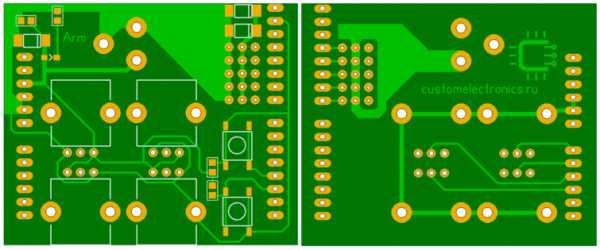
Управляется все Arduino-совместимой платой и шилдом для нее:

Сборка
Чтобы собрать манипулятор потребуется около двух часов и куча крепежа. Сам процесс сборки я офмил в виде инструкции в фотографиях (осторожно, траффик!) с подробными комментариями по каждой операции. Также я сделал подробную 3D-модель в простой и бесплатной программе SketchUp. Так что всегда можно повертеть ее перед глазами и посмотреть непонятные места:

Электроника и программирование
Я сделал целый шилд, на котором установил, помимо разъемов сервоприводов и питания, переменные резисторы. Для удобства отладки. На самом деле достаточно при помощи макетки подвести сигналы к двигателям. Но у меня в итоге получился вот такой шилд, который (так уж сложилось) я заказал на заводе:
Вообще я сделал три разные программы под Arduino. Одна для управления с компьютера, одна для работы в демо-режиме и одна для управления кнопками и переменными резисторами. Самая интересная из них, конечно, первая. Я не буду приводить здесь код целиком — он доступен в онлайн здесь.
Для управления необходимо скачать программу для компьютера. После ее запуска мышь переходит в режим управления рукой. Движение отвечает за перемещение по XY, колесико изменяет высоту, ЛКМ/ПКМ — захват, ПКМ+колесико — поворот манипулятора. И это на самом деле удобно. Это было на видео в начале статьи.
Исходники проекта
Здесь — 3D-модель, файлы для резки, подробный список комплектующих, плата, софт. Все!
Здесь — подробная инструкция по сборке с фотографиями и комментариями
Здесь — комментарии по аппартаному и программному обеспечению
История проекта — если кому-то будет интересно посмотреть на неудачные версии.
Ну, и, конечно, авторы проекта uArm. (я не трогал их исходников только фотографии и утилиту для ПК))
P.S.:
Если не возражаете — вот вторая версия манипулятора в работе:
И еще нескоько фотографий финальной версии:
www.parkflyer.ru
Конструкция и принцип действия крана-манипулятора
Краны-манипуляторы на автомобильном шасси часто используются для перемещения грузов. Во многих случаях эти грузы имеют значительную массу, воздействующую со значительной силой на различные части крана. Узнайте, как с помощью моделирования можно определить влияние этих сил и оптимизировать работу крана.
Мобильность и грузоподъемность
Конструкция кранов позволяет поднимать и опускать грузы, слишком тяжелые для человека. Во многих областях применения этих машин — от строительства до обслуживания линий электропередач — полезным преимуществом также является мобильность. Краны-манипуляторы можно легко передвигать в различных направлениях, а также перевозить по автомобильным дорогам, что позволяет избежать затрат на дополнительное транспортное оборудование.

Пример крана-манипулятора («Кран-манипулятор Palfinger (Австрия). Конструкция из бетона (сделана в Германии) представляет собой небольшую установку для очистки сточных вод для дома с четырьмя и менее жильцами». Автор: TM — собственная работа. По лицензии Creative Commons Attribution-Share Alike 2.0 Germany из Wikimedia Commons.)
Краны подобного типа оснащаются несколькими гидравлическими цилиндрами, управляющими перемещением манипулятора, а также множеством других механизмов. При перемещении тяжелых грузов на компоненты крана воздействуют значительные силы. Используя моделирование, мы сможем исследовать воздействие этих сил на кран во время его работы и определить способы улучшения его эксплуатационных характеристик путем оптимизации конструкции.
Исследование твердого тела на примере крана-манипулятора
Модель крана-манипулятора исследует силы, действующие на цилиндры и шарнирные соединения крана при его эксплуатации, используя возможности модулей Динамика многотельных систем и Механика конструкций. Импортированная из модели CAD геометрия крана состоит из 14 частей, передвигающихся относительно друг друга.
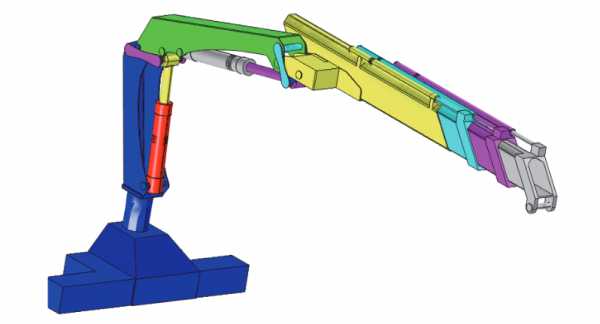
Геометрия крана-манипулятора.
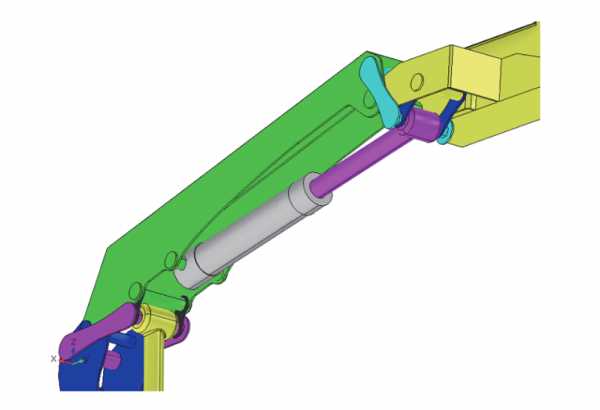
На рисунке ниже представлен более подробный обзор рычажных механизмов крана. После рисунка приводится таблица, содержащая описание отдельных компонентов.
| Компонент | Цвет |
|---|---|
| Основание | Синий |
| Внутренняя секция стрелы | Зеленый |
| Внешняя секция стрелы | Желтый |
| Телескопические секции | Голубой, фиолетовый, серый |
| Цилиндры механизма подъема стрелы | Красный, серый |
| Поршни механизма подъема стрелы | Желтый, фиолетовый |
| Рычажный механизм внутренней секции | Фиолетовый, черный |
| Рычажный механизм внешней секции | Голубой, синий |
В данном примере к крану приложены две нагрузки: собственный вес, направленный в отрицательном направлении по оси z, и полезная нагрузка в 1000 кг, приложенная к его оконечности. Рабочий цикл включает поднятие груза из удаленного положения и его перемещение под стрелу крана. Сначала груз перемещается вверх, а затем — по направлению к крану. График ниже изображает траекторию оконечности крана в течение рабочего цикла.
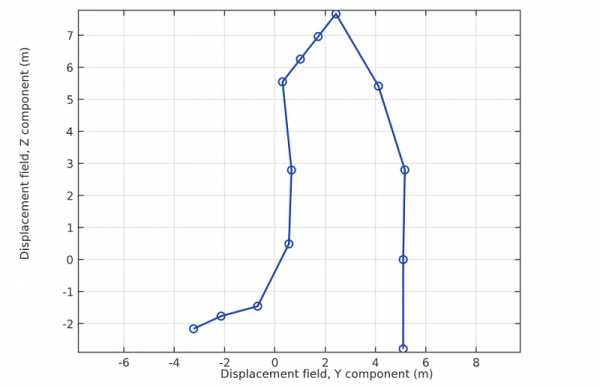
Траектория оконечности крана в течение рабочего цикла.
Фактически кран управляется посредством изменения длины трех цилиндров: цилиндра внутренней секции стрелы, цилиндра внешней секции стрелы и цилиндров телескопического механизма. Цилиндр внутренней секции стрелы обеспечивает ее поднятие, цилиндр внешней секции стрелы регулирует величину угла между внутренней и внешней секциями, а цилиндры телескопического механизма регулируют вылет стрелы. Поскольку это более удобно, в данном случае в качестве параметров используются углы наклона секций стрелы, а не длины цилиндров.
Результаты
На изображении ниже представлено 9-е положение рабочего цикла, в котором угол между внутренней секцией стрелы и горизонталью составляет 45°, угол между внутренней и внешней секциями стрелы составляет –30°, общий вылет составляет 1,5 м.
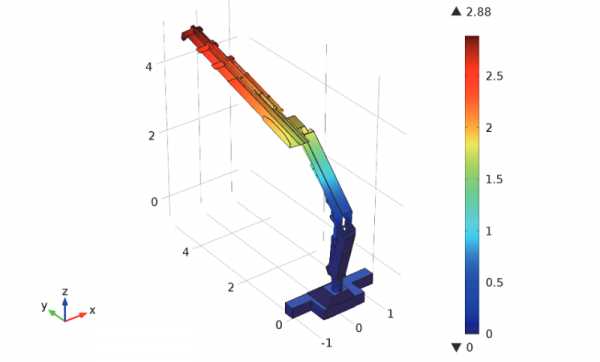
Кран в 9-м положении рабочего цикла. Цветом обозначено общее смещение компонентов крана.
Теперь рассмотрим воздействие нагрузок на различные части крана. На каждом из представленных ниже графиков номер решения соответствует положению крана. В первоначальном положении кран поднимает груз с помощью удлиненной стрелы, а затем, в решении, соответствующем последнему положению, опускает груз рядом с собой.
Начнем с сил, воздействующих на цилиндры, управляющие положением стрелы. В данном случае силы сжатия имеют положительное направление. Когда перемещаемый груз расположен далеко от основания крана, силы, воздействующие на цилиндры, будут больше по величине, как и можно было предположить. Наибольшая величина силы во время рабочего цикла определяет требуемые характеристики цилиндра.
Силы, воздействующие на цилиндры, управляющие положением стрелы.
На следующем графике показаны силы, воздействующие на цилиндры телескопического механизма. Как и в предыдущем примере, сила сжатия имеет положительное направление. Цилиндры внутренней секции рассчитаны на более высокие нагрузки, поскольку им необходимо перемещать вес телескопических сегментов на большее расстояние.
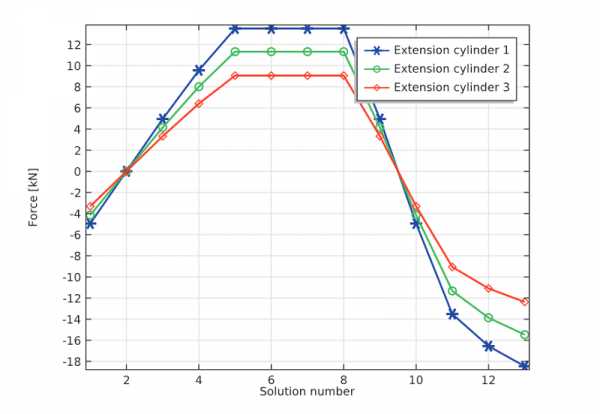
Силы, воздействующие на цилиндры телескопического механизма.
И наконец, мы можем наблюдать силы, действующие на шарниры между основными частями крана. Этот же способ может использоваться для исследования сил, воздействующих на соединения между любыми частями крана. Представленные ниже результаты полезны для определения конструкционных размеров подобных компонентов.
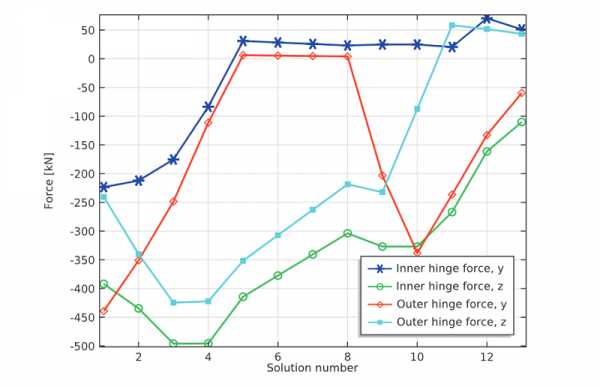
Силы, воздействующие на шарниры.
Выделение определенного механизма в системе
Теперь мы можем использовать модуль Оптимизация для улучшения характеристик рычажного механизма крана. Для этого можно использовать модель Optimization of a Crane Link Mechanism (Оптимизация рычажного механизма крана), которая является продолжением модели Truck Mounted Crane (Кран-манипулятор). В этом случае основное внимание уделяется снижению усилия на цилиндре, необходимого для перемещения определенного груза в условиях наихудшего сценария цикла нагрузки.
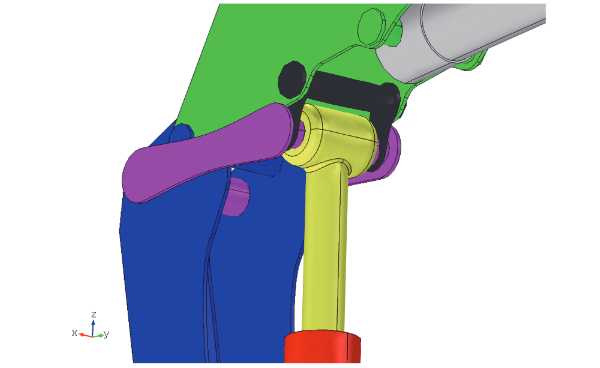
Подробное описание рычажных механизмов автокрана.
Таблица ниже содержит наименования всех используемых в модели компонентов, а также их цветовые обозначения.
| Компонент | Цвет |
|---|---|
| Основание | Синий |
| Внутренняя секция стрелы | Зеленый |
| Цилиндр механизма подъема стрелы | Красный |
| Поршень механизма подъема стрелы | Желтый |
| Рычажный механизм | Фиолетовый, черный |
Поскольку данный пример предназначен для испытания конструкции в условиях наихудшего сценария, рабочий цикл выбирается таким образом, чтобы рычажный механизм испытывал максимально возможную нагрузку. Для этого внутренняя секция стрелы поднимается в крайнее верхнее положение, телескопические элементы выдвигаются на максимальную длину, а угол внешней секции стрелы выбирается таким образом, чтобы обеспечить максимальное удаление оконечности крана. При этом используются нагрузки из исходной модели.
В рамках решения данной задачи оптимизации можно изменять положения трех осей. Первая ось соединяет первый рычаг с основанием, вторая — второй рычаг со стрелой, третья — два рычага с поршнем гидравлического цилиндра.
Сравнение конструкций
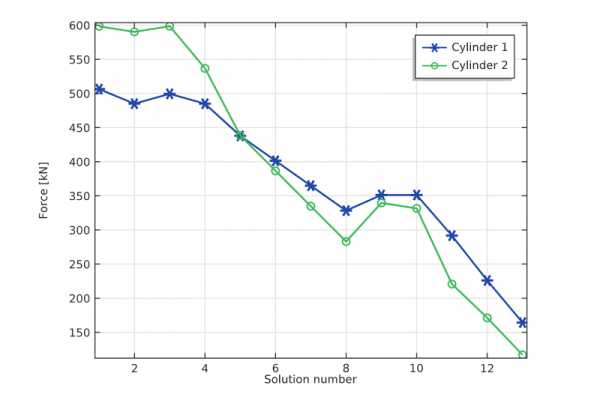
Теперь сравним наши результаты. На первом графике показано изменение усилия на цилиндре во время рабочего цикла. В данном случае мы сравниваем его максимальное значение в течение рабочего цикла для определения грузоподъемности цилиндра.
По сравнению с исходной конструкцией оптимизированный вариант позволил снизить максимальное усилие с 597 кН до 413 кН, что составляет 31% — значительное улучшение! Это позволяет увеличить допустимую нагрузку; кроме того, снижение усилия облегчает выполнение критериев по напряжению для рычажного механизма.

Сравнение усилия на цилиндре в исходном и оптимизированном вариантах конструкции.
На втором графике представлены y- и z-компоненты, а также величина силы, воздействующей на ось, образующую шарнир между основанием и стрелой. Как видно из представленных ниже результатов, результирующая сила в исходной конструкции выше, чем в оптимизированном варианте.
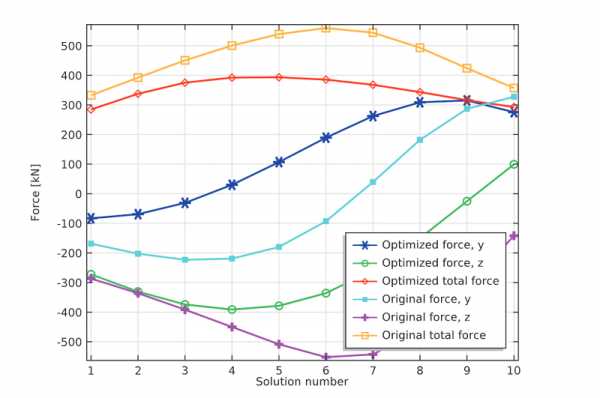
Силы, действующие на ось, в оптимизированном и исходном вариантах конструкции.
Выводы и загрузка модели
В состав пакета COMSOL Multiphysics версии 5.0 мы включили две новые модели, предназначенные для исследования взаимодействий между различными компонентами крана-манипулятора и оценки роли методов оптимизации в улучшении их эксплуатационных характеристик. Данные примеры иллюстрируют возможности моделирования в части исследования воздействия нагрузок на подобные сложные механические системы, а также то, как полученные знания позволяют улучшить их конструкцию.
Загрузить модель можно здесь:
Кстати, в настоящий момент мы разрабатываем приложение на основе данной модели. Оставайтесь с нами.
www.comsol.ru
Применение автоматических манипуляторов и промышленных роботов для автоматизации процесса сборки
Описание
Применение автоматических манипуляторов и промышленных роботов для автоматизации процесса сборки
Автоматические манипуляторы успешно применяются для автоматизации процесса сборки, в серийном производстве, особенно если в собираемый узел входят крупногабаритные детали сложной формы плохо поддающиеся автоматической ориентации в бункерных загрузочных устройствах и магазинах. Поэтому основным функциональным назначением манипуляторов, применяемым в сборочном производстве, является поштучный забор из магазина или кассеты, подача в зону сборки и установка в требуемом положении на сборочное приспособление собираемых (чаще всего базовых) деталей и съем собранного узла с последующей его укладкой в тару. Для этого манипулятор в общем случае оснащается одной или двумя руками с механизмом выдвижения, механизмом подъема и поворота руки, с закрепленным на ней схватом для зажима и удержания в процессе перемещения детали, что позволяет подавать собираемую деталь в зону сборки независимо от взаимного расположения накопителя (кассеты) и сборочного приспособления. Вторая рука манипулятора, чаще всего, используется для съема с приспособления – спутника собранного узла. Наиболее эффективно, особенно в условиях многономенклатурного сборочного производства, использование автоматических манипуляторов, перечисленные механизмы которых имеют большой диапазон регулировки, а последовательность движений может меняться путем изменения программы работы манипулятора.

На Рис 1 показаны два автоматических манипулятора, оснащенные перечисленными механизмами, которые работают в составе автоматической линии для сборки терморегулятора, при этом один осуществляет установку трубки терморегулятора, имеющую сложную форму, в приспособление – спутник, установленное на поворотном столе, а второй, расположенный на заднем плане, выполняет съем собранного узла (терморегулятора). Такие манипуляторы обычно имеют пневматический привод и строятся по модульному принципу. В настоящее время рад известных фирм выпускают модули, которые позволяют компановать манипулятор нужной конфигурации с требуемой величиной перемещения транспортируемого предмета.
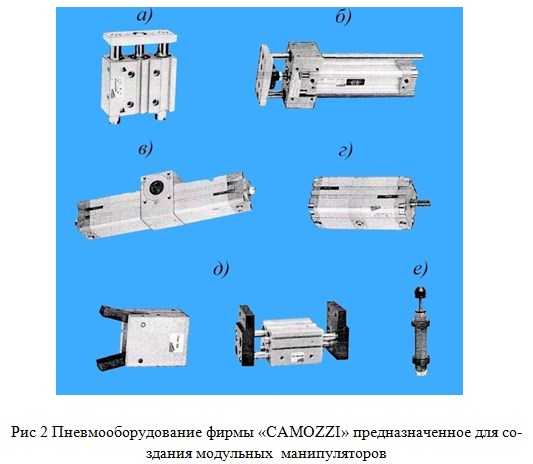
На Рис 2 показаны различное пневмообрудование, выпускаемое фирмой «CAMOZZI», на базе которого можно создавать различные механизмы манипуляторов, компануя их по модульному принципу. В частности модули выдвижения (смещения) – Рис 2а, б, модуль поворота – Рис 2в, тандемный пневмоцилиндр, позволяющий выполнять несколько дискретных перемещений – Рис 2г, схваты – Рис 2д, гидроамортизатор – Рис 2е.
На Рис 3 показан общий вид автоматизированного комплекса оборудования для сборки петли, в состав которого входит автоматический манипулятор, осуществляющий переукладку собираемых деталей перед их сборкой. В состав комплекса входит пневмоцилиндр 1 для подачи карт петли по лотку 2, делительное устройство 3, разделяющее транспортируемые по лотку 2 детали (карты петли) на два потока и состоящее из пневмоцилиндра 4, платформы 5 с закрепленными на ней лотками 6 и 7 и двух пневмоцилиндров 8, а также лотки 9 и 10 с ориентирующим устройством 11, автоматическим манипулятор В, сборочная головка 14, шаговый транспортер 46 сталкивающее устройство 50 и пресс 48. Ориентирующее устройство 11 представляет собою плиту с закрепленными на ней направляющими 12 и пластинчатыми пружинами 13. Манипулятор В с пневматическим приводом состоит из колонны 16, имеющей возможность поворота, осуществляемого посредствам поворотного механизма 15, две расположенные под углом 90 град друг к другу руки 17, с механизмом горизонтального выдвижения, снабженные электромагнитным схватом 19, который связан со штоком пневмоцилиндра 18 для его вертикального перемещения. По обе стороны от сборочной головки 14 установлены бункерные загрузочные устройства 20 для подачи осей, которые связаны с рабочей зоной сборочной головки 14 посредствам лотков 21.
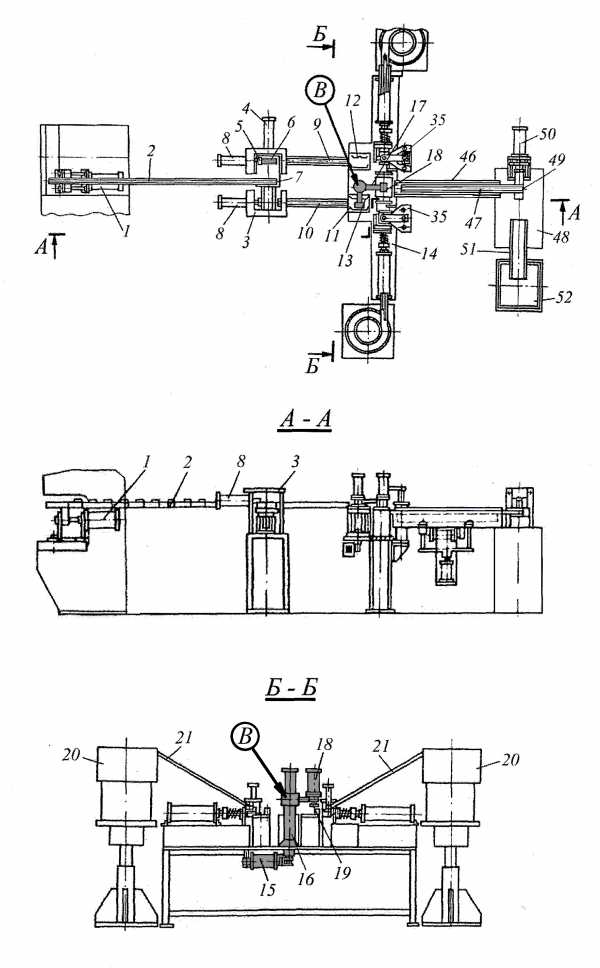 Рис 3 Общий вид автоматизированного комплекса оборудования для сборки петли, содержащий автоматический манипулятор
Рис 3 Общий вид автоматизированного комплекса оборудования для сборки петли, содержащий автоматический манипулятор
Сборочная головка 14 содержит раму 22 на которой закреплены ложемент 23 с электромагнитами 24, а также два механизма подачи 25 и упоры 26 размещенные между ложементом 23 и механизмом подачи 25 (см. Рис 4). Механизм подачи 25 включает с себя подпружиненный ползун 27, перемещающийся по направляющим 28 посредствам пневмоцилиндра 29, при этом на ползуне 27 закреплена каретка 30, в центрах 31 которой установлены с возможностью поворота зажимы 32 и 33, удерживаемые в исходном положении пружиной 34. Между бункерами 20 для подачи осей и сборочной головкой 14 установлены механизмы 35 для досылания осей, предназначенные для переталкивания осей из магазина 20 в зажимное устройство 32.
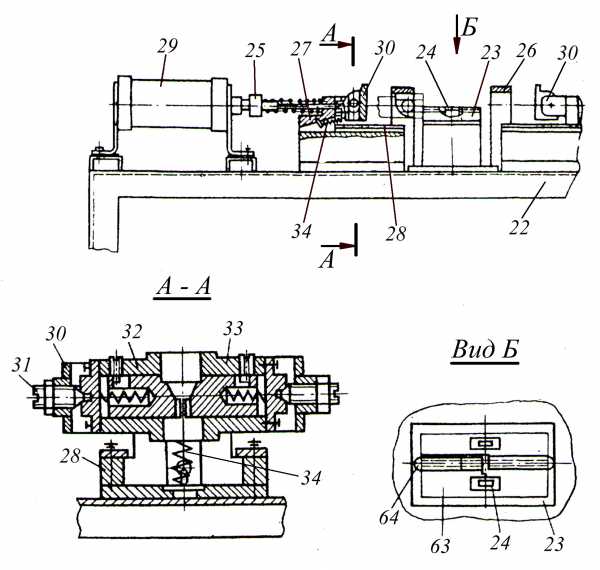 Рис 4 Сборочная головка автоматизированного комплекса оборудования
Рис 4 Сборочная головка автоматизированного комплекса оборудования
Механизм 35 досылания осей содержит пневмоцилиндр 36, закрепленный на раме, шток которого посредствам кронштейна 37 связан с толкателем 38 и тягой 39, на конце которой закреплена пята 40 взаимодействующая с подпружиненным отсекателем 41, шарнирно установленным на лотке 21 и имеющим два рабочих выступа 42 и 43 (см. Рис 5).
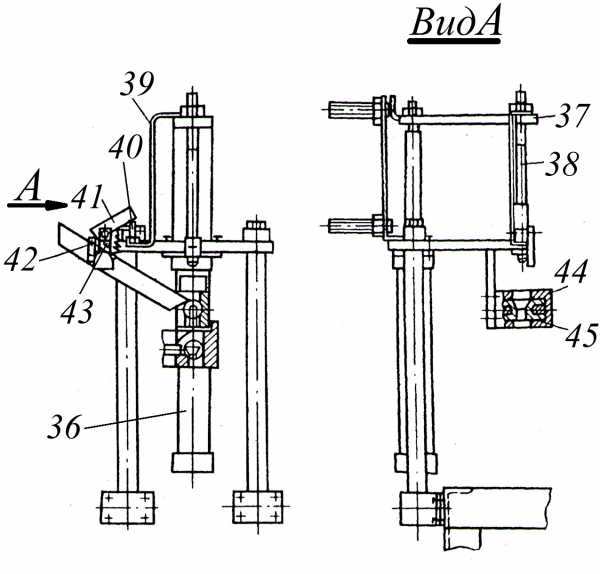 Рис 5 Механизм досылания осей
Рис 5 Механизм досылания осей
Выступ 42 предназначен для взаимодействия с предпоследней перед отсекателем осью, а выступ 43 – с последней. На раме соосно с толкателем 38
xn--80adfdbscmorebdjpezh9nvd.xn--p1ai